AK 대 AR. 파트 III

AK와 M16는 분말 가스를 제거하는 것과 셔터를 돌려서 셔터를 잠그는 것과 같은 자동화 작동 원리를 사용합니다. 이것에 그들의 유사성은 끝납니다. 먼저, 카트리지를보십시오. 이젝터 후크 아래에있는 더 넓은 그루브와 국내 카트리지의 더 짧은 슬리브 길이 및 미국인의 테이퍼 (병과 혼동하지 말 것)의 거의 완전한 부재에주의하십시오. 롤백 및 롤링 볼트 메커니즘의 작업을 고려하십시오.
롤백
누구나 AK 볼트 캐리어의 상당한 질량을 알고 있습니다. 가속하려면 시간과 여유 공간이 필요합니다. 이 가속에서는 리시버의 전체 캐비티가 멈출 때까지 먼지로 가득 차거나 코킹 레버로 잡지 않는 한 리턴 스프링을 제외하고는 아무것도 막지 못합니다. 그러나 셔터가 열리면 이미 일정량의 운동 에너지가 축적됩니다. 또한 슬리브의 잠금 해제 및 변형이 발생합니다. 이 과정은 NSD 나 포럼 어느 곳에서도 명확하게 설명되지 않았기 때문에 나는 파업에 대해 별도로 설명 할 것입니다. 병기고 햄스터. 마음과 트롤링을위한 음식이있을 것입니다.
이 시간 동안 배럴의 잔류 압력은 추악한 낮은 값으로 떨어진다. 테이퍼로 인해 라이너를 이동 한 후에는 더 이상 챔버의 벽에 닿지 않으며 추출시 문지르지 않습니다. 아무 것도 챔버에서 카트리지 케이스의 움직임을 막지 못하기 때문에 프레임은 해머를 휘게 할 때만 에너지를 낭비하기 시작합니다. 그런 다음 셔터 서프 레서를 사용하여 상점의 카트리지를 흔들어서 카트리지 케이스를 녹일 강도가 충분합니다. 따라서, 가스 피스톤에 수신 된 하나의 임펄스에서, 슬라이드 프레임은 그 기능을 순차적으로 수행한다 .
M16 자동화는 AK보다 훨씬 어렵습니다. 배럴에서 볼트 구멍으로 파이프 라인을 통해 배출 된 가스는 그 뒤쪽 벽과 게이트의 끝 부분을 누른 상태에서 반대 방향으로 압력을 받고 있습니다. 프레임 자체가 수평 변위를 시작하고, 모양이있는 네크 라인의 한쪽 끝에서 미끄러지는 선두 손가락이 셔터를 돌리는 동시에 트리거를 콕니다. 잠금 해제는 셔터의 작은 회전 각과 조명 프레임의 작은 관성으로 인해 매우 빠르게 발생하므로 챔버의이 지점에서 수백 기압의 잔류 압력이 발생합니다.
슬리브는 플런저 (plunger) 역할을하며 챔버의 분말 가스에 의해 제거됩니다. 셔터를 누르면 셔터가 가해지고 충격이 가해지며 초저 테이퍼 모양과 재료의 소성이 안정적인 봉합을 제공합니다. 여기서는 움직일 필요가 없으며 필요하지도 않습니다. 출구의 끝이 챔버의 벽에 문질러 질 때까지 모든 방향으로 슬리브. 그녀가 아직 가지고있는 그 작은 테이퍼는 잔류 압력에 의해 날려 버린다. 볼트 캐리어의 캐비티에있는 가스는 셔터를 잠그지 직후 정지하고 두 개의 측면 개구부를 통해 대기로 방출됩니다.
이 디자인의 확실한 이점은 긴 소매 (비록 리턴 스프링이 엉덩이로 제거 되어야만 함)와 무게가 가벼워서 콤팩트하다는 것입니다. M16 자동화 작업의 프로세스는 Ruslan Chumak의 기사에서 Kalashnikov magazine N 8 / 2006에 자세히 설명되어 있지만 부정확하지는 않습니다.
그러나 엔트로피가 로밍하는 곳이 있습니다. 우선, 두 개의 에너지 원 - 프레임과 슬리브로의 가스 충격이 챔버 밖으로 날아갑니다. 둘째, 동시에 여러 작업 - 볼트 잠금 해제, 망치 발로, 챔버에서의 마찰을 극복하기위한 라이너 추출. 프로그래머들은 나를 즉시 이해했습니다. 디버그하기 쉬운 프로그램은 무엇입니까? 함수가 순차적으로 실행되어 계산 결과를 전달하거나 여러 함수가 완전히 비동기 적으로 작동하면서 여러 함수에 값을 전달하는 함수입니다. 그러한 시스템에서 가능한 고장을 계산하는 것은 사실상 불가능합니다. 오염, 기상 조건, 사용자의 어리 석음 정도, 서로에 대한 무기 부품의 위치 및 오작동 유형에 따라 시스템 상태의 많은 조합이 있습니다. 공급 건너 뛰기에서 카트리지 걸림까지; 리시버의 파열에서 배럴의 팽창까지. 여기에는 특정 종속성과 결과를 설명 할 공간이 충분하지 않습니다.
나캇
AK의 롤 볼트로 롤백하기가 더 쉽습니다. 카트리지를 매거진에서 챔버로 밀어 넣고 볼트를 돌리면 두 번 연속 작동됩니다. 프레임은 작업을 시작하기 전에 잘 가속되며, 큰 질량 런업이 끝날 때까지 운동 에너지가 축적되어 거의 모든 것이 볼트를 잠그고 있습니다. 그것이 충분하지 않으면, cocking handle을 치면 모든 문제가 해결됩니다.
M16에서는 슬라이드 프레임이 더 짧아서 운동 에너지의 질량과 스톡이 적습니다. 그리고 여기에 그 길의 끝에있는 틀이 있습니다. 리턴 스프링의 힘이 최소값에 도달 할 때, 그리고 그녀 자신이 카트리지의 공급 물로 롤의 에너지의 일부를 잃어 버렸을 때게이트에서 이젝터 인 예기치 못한 장애물이 발생합니다.

이 이젝터는 탄환 케이스 또는 나사 식 카트리지를 멀리 보내기 위해 매우 강한 스프링을 가지고 있습니다. 그러나 너는 볼트를 돌리기 전에 그것을 짜낼 필요가있다. 매연이나 먼지가 있으면 프레임의 에너지 나 리턴 스프링의 힘으로는 충분하지 않을 수 있습니다. 그리고 여기 그는 보편적 인 부끄러움 - ram rammer입니다. 브랜드 arroobnyh 칩. 이러한 사건은 첫 번째 Bergman 권총에 추출기가없는 것과 비교 될 수 있습니다. 그러나 Bergman은 용서받을 수 있으며 그는 선구자입니다. 그리고 스토너? 예를 들어, Stoner가 배출기를 버리고 Sleeve Type AK 또는 Stg-44를 해제 할 수 있습니까? 왜 안 그래? 어려운 질문입니다. 그 대답은, 아마도 가장 첫 번째 부분에서 말한 "비참"에 있습니다. AK에서했던 것처럼 M16 셔터에 리플렉터 돌출부를 도입하는 것은 건설적이지만 기술적으로 불가능합니다.
일반적인 철학적 주제에서 다시 이야기하겠습니다. 신의 축복을받습니다. 작성한 보너스와 함께 "방해"라는 한 가지 효과를 분석해 봅시다.
방해
볼트 캐리어 AK를 잡고 볼트를 삽입하고 수신기에 설치하기 전에 앞쪽으로 가져옵니다. 이 위치는 달리기 시작 전에 차지합니다. 거울 셔터에서 손가락을 누르면 어떻게됩니까? 그리고 어떻게해야합니까? M16로 같은 과정을 해봅시다. Op-pa. Eey가 말한 당나귀로 들어가고 나간다.
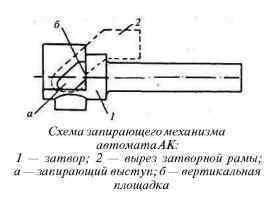
런업시, 슬라이드 프레임 (AK)은 운동에 수직 인 플랫폼으로 슬라이드를 전방으로 밀어 낸다. 교과서 그림에서 수직 플랫폼 인 문자 "b"로 지정됩니다. 이동이 끝나면 왼쪽 전투 정류장은 라이너 내부의 사면에 부딪쳐 볼트를 돌리고 "수직"플랫폼과의 맞물림에서 선단을 제거합니다 (그림에서 "고정"이라고 부름). 그리고이를 형상 홈의 경사면으로 향하게합니다. 전투 중에 셔터를 돌리기 시작합니다.

M16에는 수직 또는 수직 패드가 없습니다.

제작자가 생각한 것처럼 프레임은 뒤쪽으로 당겨 지거나 곡선 홈을 통과하는 선행 손가락을 통해 볼트를 밀게됩니다. 굴러 갈 때 셔터가 움직이기 어려워지면 어떻게 될까요? 지연력은 리시버의 홈 벽면에있는 핑거 캡의 캡을 통해 전달됩니다.
다음은 실험을 명확하게 보여주는 동영상입니다.

볼트 캐리어와 볼트는 하우징의 다가오는 움직임에 의해 고정되고, 그 후 무기는 돌출 된 프레임의 끝에 배치됩니다. 실험자는 손가락으로 볼트를 누르고, 선행 손가락의 뚜껑과 홈의 마찰 사이의 마찰력으로 기계의 무게를 유지합니다. 그가 볼트의 힘을 제거하자마자, 무기는 중력에 의해 떨어집니다. 그러한 건설적인 해결책의 장점은 단 하나의 결함에만 국한되지 않는다는 것입니다. 롤 포워드 (roll forward)와 롤백 (rollback), 그리고 다른 노드의 오염이나 에너지 손실에 따라 작동 할 수 있습니다.
자료에 따르면,
F.K. Babak, 작은 팔의 기본, Polygon, St. Petersburg, 2004. IBSN 5-89173-195-9.
M16에 대해 다시 한 번
정보