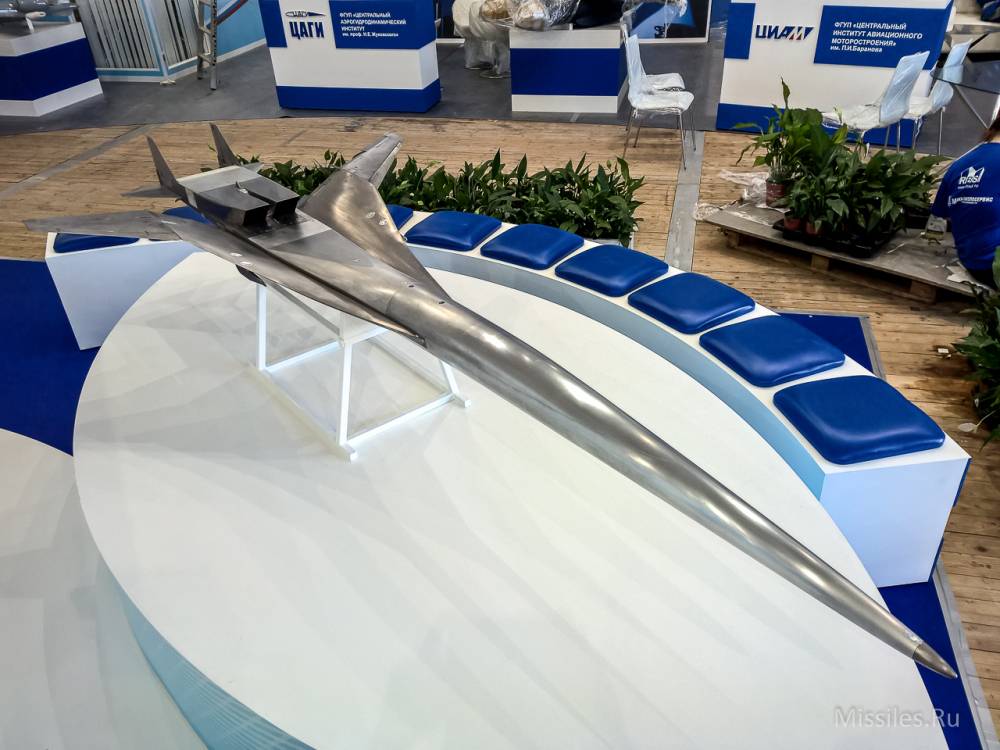
다중 모드 극 초음속 무인 공중 차량 "해머"

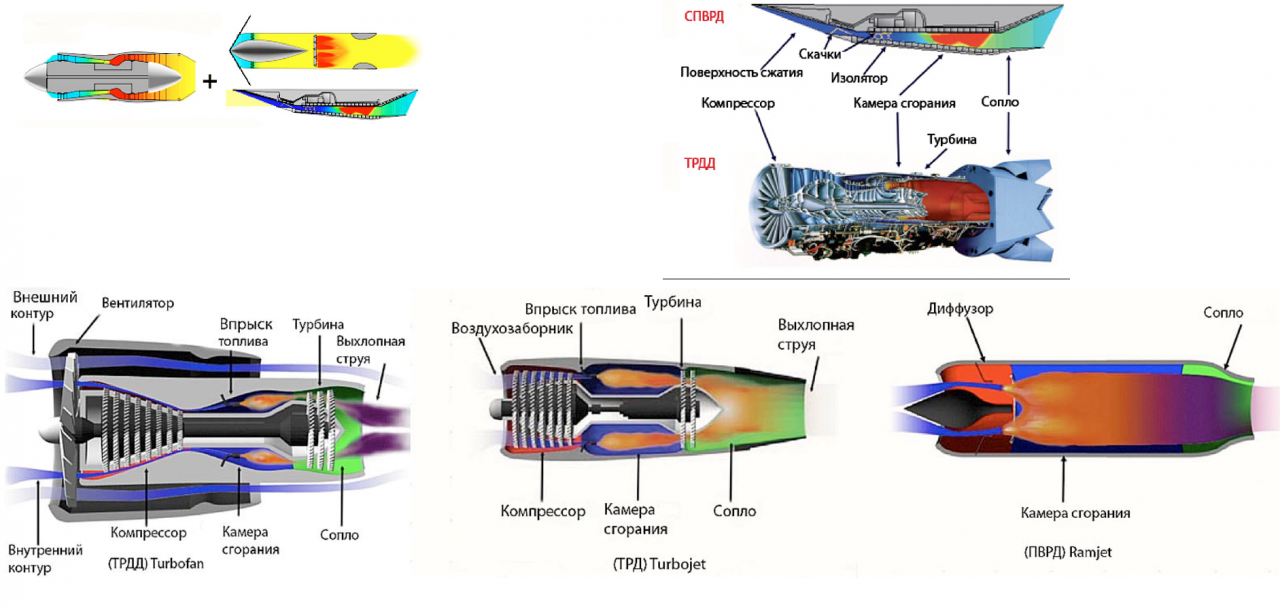
현재 Molniya는 연구 개발 분야에서 다중 모드 극 초음속 무인 항공기를 개발하고 있습니다. 이 무인 항공기는 터보 - 램젯 발전소가 결합 된 극 초음속 무인 추진기의 프로토 타입 시연기로 간주됩니다. 이 프로토 타입의 주요 기술은 아음속 연소 챔버와 스크린 흡입 장치가있는 램 제트 엔진 (ramjet)을 사용하는 것입니다.
프로토 타입 시위자의 계산 및 실험 매개 변수 :
마하 크루즈 번호 M = 1.8 ... 4
- 작음에서 Н까지의 비행 고도 = 20 000 m,
- 비행 체중 530 kg.
- 고체 연료 가속기를 사용하여 발사 장치로 지상 기동.

이 SRW의 역사는 유망 무인 또는 유인 가속기의 공기 역학적 모양을 결정한 NPO Molniya가 개발 한 다중 모드 초음속 무인 항공기 (MSBLA)의 프로젝트였습니다. MSBLA의 핵심 기술은 아음속 연소 챔버와 스크린 흡입 장치가있는 램 제트 엔진 (램젯)을 사용하는 것입니다. MSBLA 설계 변수 : 마하 순항 수 M = 1.8 ... 4, 비행 고도가 최저에서 H ≈ 20 000 m, 최대 1000 kg까지 시작.
SVS-2의 TsAGI 부스에서 조사 된 공기 흡입구 배치는 동체 (그림 A)와 동등한 길이의 직사각형 스크린 (그림 B)과 동시에 "동시에"만들어진 복부 쐐기 스크린의 낮은 효율을 보여주었습니다.

둘 다 증가하는 대신에 총 압력 ν와 유량의 f 값을 복원하기위한 계수의 근사적인 일정성을 제공 하였다.
X-90 로켓에 사용 된 정면 스크린은 MSBLA를 가속 비행기의 프로토 타입으로 적합하지 않기 때문에 초기 80-s의 Tsagi에 대한 실험적 연구에 기반하여 결정되었고, 복부 스크린을 개발하고, 2 단계 중앙 몸체로 구성을 유지했습니다. 테스트 결과.
TsAGI 특별 CBC-2 테스트 벤치에서 2 단계의 실험 연구를 수행하는 동안 12 월 2008 - 2 월 2009 및 3 월 2010의 중간 단계의 수치 검색 연구에서 온 스크린 공기 흡입 장치 (EVF)가 계산 된 숫자가 다른 2 단계 원추형 바디로 개발되었습니다 마하 단계 - 다양한 마하 수에서 허용 가능한 추력을 얻을 수있었습니다.

스크린의 효과는 마하 수 M> 2.5에서 받음각이 증가함에 따라 유속 및 회복 계수가 증가하는 것으로 구성됩니다. 두 특성의 양의 기울기의 크기는 마하 수가 증가함에 따라 증가합니다.

EVZU는 Raduga가 개발 한 X-90 극 초음속 실험기 (NATO 분류 AS-19 Koala에 따른 순항 미사일)에 처음 개발되어 적용되었습니다.

결과적으로, 프로토 타입의 공기 역학적 구성은 ESU를 캐리어 시스템에 통합하여 저자가 호출 한 "하이브리드"계획에 따라 개발되었습니다.
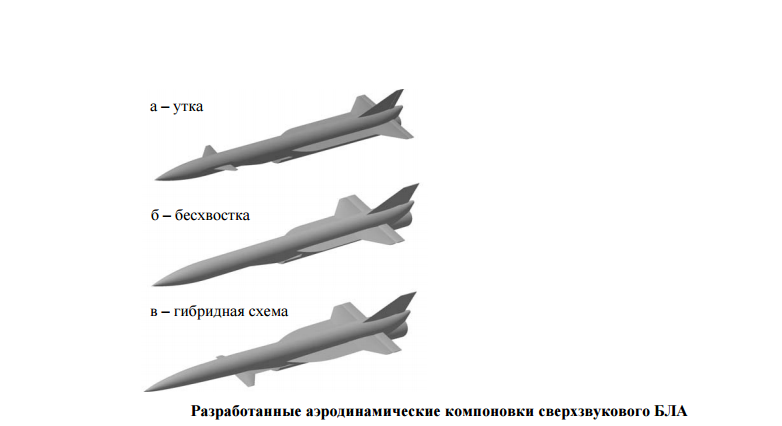
하이브리드 방식은 "오리 (duck)"방식 (베어링 표면의 수와 위치에 의한)과 테일리스 방식 (종단 제어 기관의 유형에 의한) 모두의 특징을 가지고 있습니다. 전형적인 MSBLA 궤도는 지상 기반 발사기, 고체 연료 가속기에 의한 초음속 램젯 발사 속도의 가속, 수평 세그먼트가있는 사전 결정된 프로그램에 따른 비행, 낙하산에 부드러운 착륙으로 낮은 아음속 속도로 제동을 포함합니다.
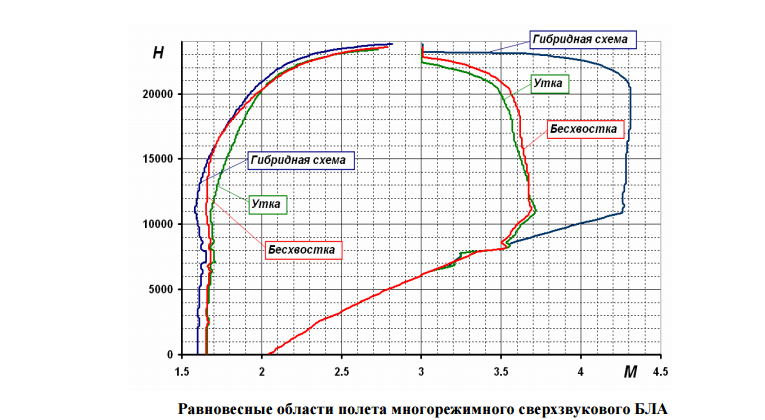
α = 1.2 ° 일 때보다 큰 스크린 효과와 공기 역학 레이아웃의 최적화로 인한 하이브리드 레이아웃이 보입니다. 1.4 °는 넓은 높이 범위에서 상당히 높은 최대 마하 수 M ≈ 4.3를 실현합니다. H = 11 ... 21 km. "duck"과 "tailless"방식은 높이 H = 3.72 km에서 M = 3.74 ... 11의 최대 값에 도달합니다. 동시에 하이브리드 방식은 최소 저항 이동과 낮은 마하 수로 인해 작은 이득을 가지며 높이 H = 11 km에서 비행 숫자 M = 1.6 ... 4.25의 범위를 갖습니다. 가장 작은 평형 비행 영역은 "오리 (duck)"계획에서 실현됩니다.
표에는 일반적인 비행 경로에 대한 개발 된 레이아웃에 대한 계산 된 비행 기술 데이터가 나와 있습니다.
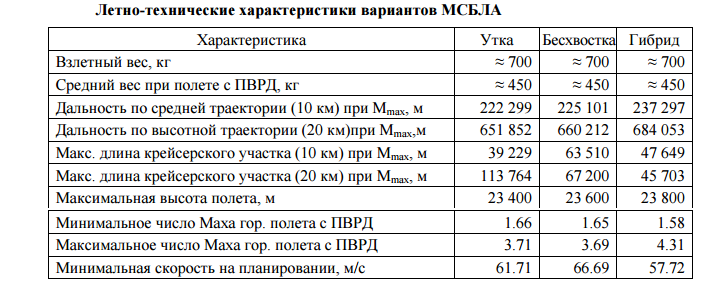
모든 MSBLA 변형에 대해 동일한 수준을 가진 비행 거리는 항공 비행장으로 돌아 가기 위해 1500-2000 km의 초음속 비행 범위로 석유 연료의 약간의 상대적 예비 량을 가진 살포기를 성공적으로 만들 가능성을 보여주었습니다. 동시에, 공기 역학적 구성과 램제트 엔진의 스크린 흡입 장치의 깊은 통합의 결과 인 개발 된 하이브리드 레이아웃은 비행 속도 제한과 속도 제한이 실현되는 고도 범위에서 분명한 이점을 가지고있었습니다. Hmax Mmax = 4.3 20 m에서 Mmax = 500에 도달하는 마하 수와 비행 고도의 절대 값은 무게와 그에 따라 비용 절감을 제공하는 극 초음속 고산포로 러시아에서 재사용 가능한 기존 우주 항공 시스템의 실현 가능성을 시사한다 6의 공간 일회용 스테이지 - 땅에서 시작하는 것과 비교 된 8 시간.
이 공기 역학 레이아웃은 높은 초음속 비행 속도의 재사용 가능한 다중 모드 무인 항공기를 고려하기위한 최종 옵션이었습니다.
개념 및 전반적인 레이아웃
소형 프로토 타입과 비교할 때 오버 클러킹 항공기에 대한 독특한 요구 사항은 기존 비행장에서 항공기에 이착륙하는 것과 마하 수보다 적은 수의 램제트 발사 M <1.8 ... 2로 비행해야한다는 것입니다. -램제트 엔진 및 애프터 버너 터보 제트 엔진 (TRDF).
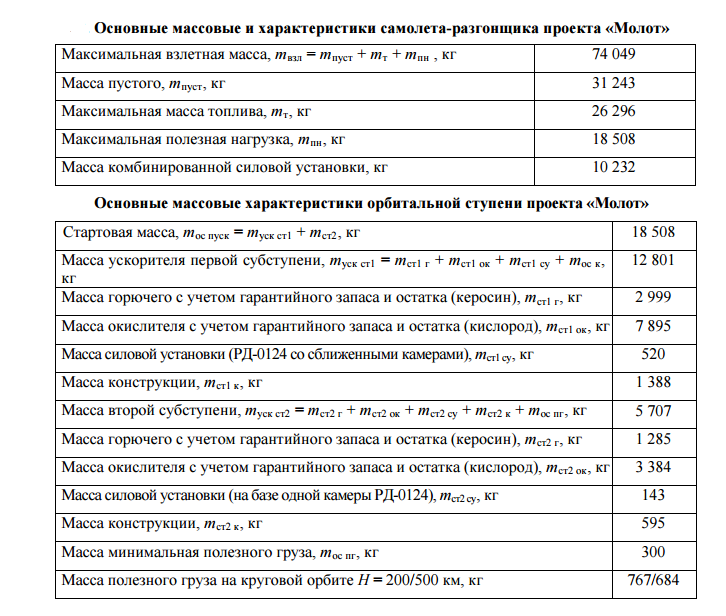
이를 토대로 1000 kg에서 낮은 지구 궤도 200 km의 설계 하중을 지닌 가벼운 수송 공간 시스템을위한 스프레더 항공기의 기술적 배치와 일반적인 배치가 형성되었다. 2 단계 궤도 스테이지의 무게 파라미터는 가속기의 시동 조건에 따라 적분 손실이있는 특성 속도 법을 사용하는 RD-0124 산소 - 케로 센 엔진을 기반으로 추정되었다.

첫 번째 단계에서는 RD-0124 엔진 (30 000 중공 추력, kg, 특정 임펄스 359 с)이 설치되지만 프레임 직경이 좁고 밀접한 간격을 유지하는 카메라 또는 RD-0124М 엔진 (기본 카메라와 더 큰 직경의 새 노즐로 기본 엔진과 다릅니다)이 설치됩니다. RD-0124 (무효 추력 7 500 kg을 채택)에서 단일 카메라로 엔진을 두 번째 단계에서. 18 508 kg의 총 중량을 가진 궤도 단의 무게 요약을 기반으로 그 구성이 개발되었고, 조합형 발전소 (CSU)의 74 000 kg 이륙 중량에 대한 극 초음속 가속기의 배치가 기본으로 개발되었습니다.
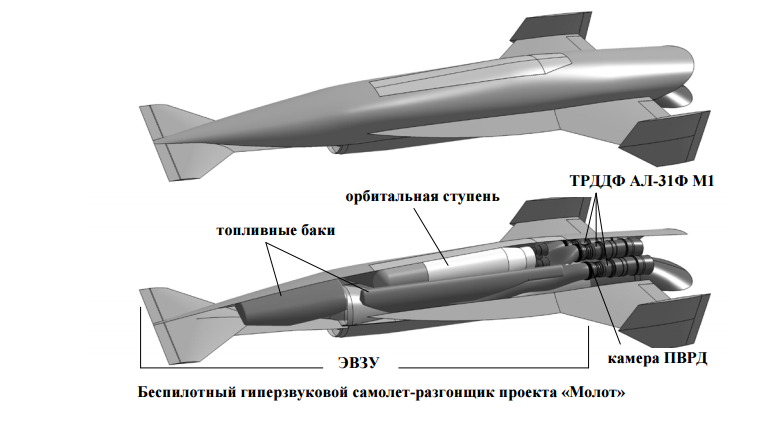
LCP는 다음을 포함합니다 :
• 연소 챔버의 ESD, 유형 및 레이아웃과 유사한 원형의 램 제트 엔진;
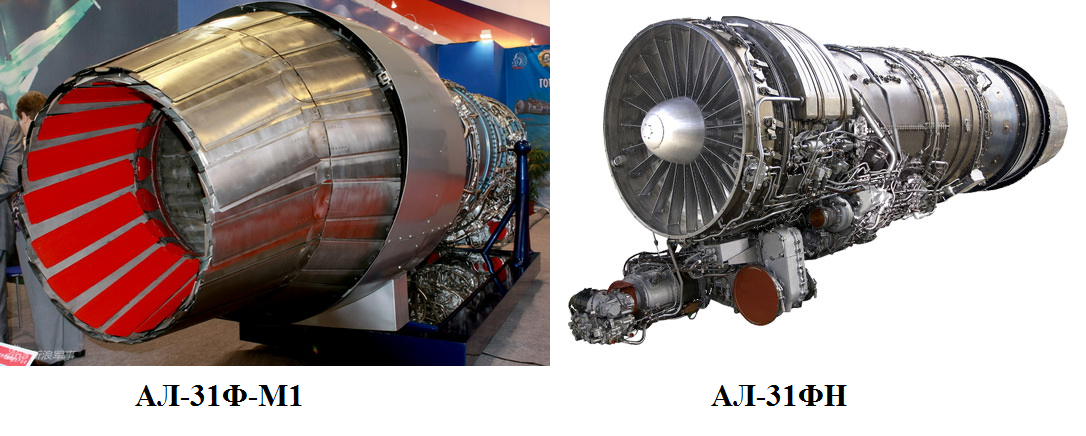
• 3 대의 터보 제트 2 회로 애프터 버너 엔진 AL-31F М1
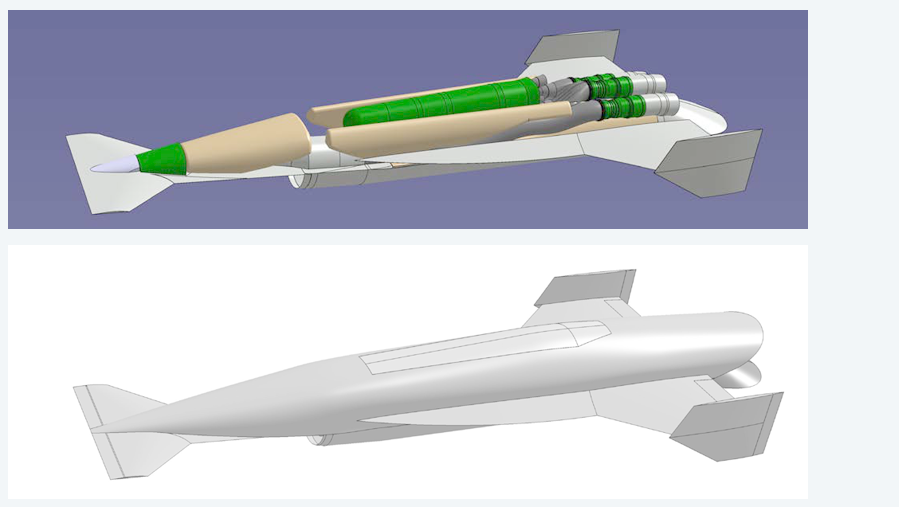
TRDF와 램제트 엔진은 각각 별도로 장착하고 유지할 수있는 수직 형 패키지로 구성되어 있습니다. 최대 크기의 ESD 및 그에 따른 추진력을 사용하여 램젯을 수용하기 위해 차량의 전체 길이가 사용되었습니다. 기계의 최대 이륙 중량 74 t 빈 중량 - 31 t.
이 섹션에서는 궤도 스테이지를 보여줍니다.이 스테이지는 18,5 톤의 무게를 지닌 2 단계 액체 PH로, 1000 KL을 낮은 지구 궤도 200km에 가져옵니다. 3 TRDDF AL-31FM1도 있습니다.
이 크기의 램 제트에 대한 실험적 테스트는 오버 클러킹 터보 팬 엔진을 사용하여 비행 테스트에서 직접 수행되어야합니다. 단일 흡기 시스템을 개발할 때 다음 기본 원칙이 채택되었습니다.
• 최소한의 전력 부하로 움직이는 부품의 최소값.
• 프로토 타입 램젯 메모리 소자의 이론적 기하학을 완전하게 보존합니다.
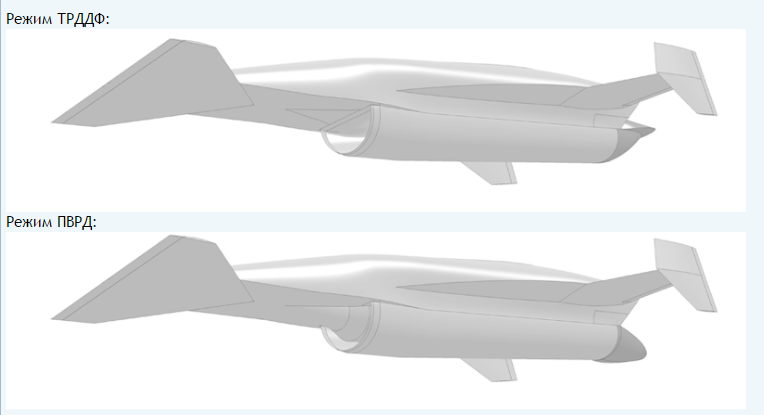
공기 흡입구의 초음속 부분에서 TRDF와 ramjet 용 덕트를 분리하고 FEM의 "앞뒤"초음 파 부분을 조절되지 않은 구성으로 변환하는 동시에 사용하는 변압기 장치를 개발하여 동시에 채널 사이의 공기 공급을 전환합니다. 이륙 중 장치의 ESD는 TRDDF에서 작동하며 속도가 M = 2,0로 설정되면 램지로 전환됩니다.
EVZU 변압기 뒤에는 수평 패키지, 적재 공간 및 주 연료 탱크가 있습니다. 보조 탱크의 사용은 "뜨거운"동체 디자인과 "차가운"단열 탱크의 등유와의 단열을 위해 필요합니다. 가반 하중 실은 TRDF가 작동 중일 때 엔진 노즐을 냉각시키기위한 유동 채널, 구획의 설계 및 램 제트 노즐의 상부 플랩을 갖는 TRDF 격실을 수용한다.
가속 평면의 ESWU 변압기의 작동 원리는 작은 값의 정확성으로 인시던트 흐름 측면에서 장치의 가동 부분에 대한 힘 반응을 배제합니다. 이를 통해 전통적인 조절 식 직사각형 공기 흡입구와 비교하여 장치 자체와 그 구동 장치의 질량을 줄임으로써 공기 흡입 시스템의 상대 질량을 최소화 할 수 있습니다. 램제트 엔진은 작동 중에 닫히면 동체 주변의 흐름이 지속적으로 흐르게하는 핵분열 성 스태킹 노즐을 갖추고 있습니다. 램젯 작동 모드로의 전환시 스태커 노즐을 열 때, 상부 플랩은 터보 팬 엔진 실의 하부 슬라이스를 폐쇄한다. 램제트 노즐이 열리면 초음속 혼성 기이며 큰 마하 수에서 실현되는 램젯 제트의 언더 - 팽창이 어느 정도 이루어지면 상부 플랩에 가해지는 힘의 길이 방향 투영으로 인한 추진력이 증가합니다.
프로토 타입과 비교하여, 항공기 이륙 / 착륙 요구로 인해 윙 콘솔의 상대적 면적이 크게 증가했습니다. 날개의 기계화는 엘레온 만 포함합니다. 킬은 착륙시 브레이크 플랩으로 사용할 수있는 방향타가 장착되어 있습니다. 아음속 비행 속도에서 흐름의 연속성을 보장하기 위해 스크린에는 편향 가능한 발가락이 있습니다. 랜딩 기어의 4 단 랜딩 기어는 먼지와 이물질이 공기 흡입구로 들어가는 것을 방지하기 위해 측면을 따라 배치됩니다. 이러한 계획은 궤도면과 유사한 EPOS 제품인 Spiral 시스템에서 이루어졌으며, 자전거 섀시처럼 이륙시 웅크리는 것을 허용합니다.
비행체 무게, 질량 중심의 위치 및 스프레더 항공기의 고유 관성 모멘트를 결정하기 위해 CAD 환경에서 단순화 된 솔리드 스테이트 모델이 개발되었습니다.
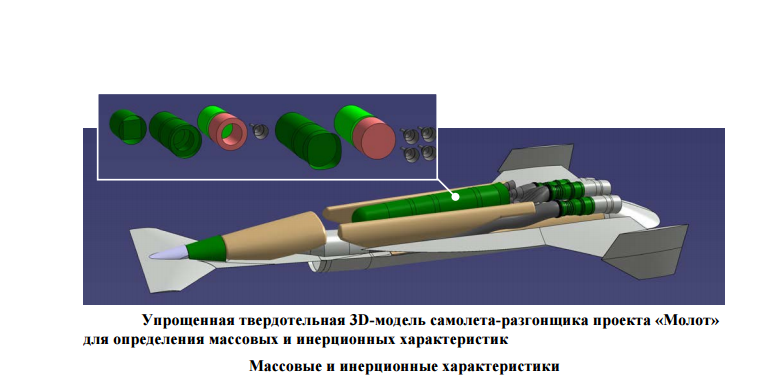
가속 평면의 설계, 발전소 및 장비는 28 요소로 나누어지며, 각 요소는 통계적 매개 변수 (위 피부의 비중 등)에 의해 추정되고 기하학적으로 유사한 고체 요소로 시뮬레이트됩니다. 동체 및 베어링 표면 설계를 위해 MiG-25 / MiG-31 항공기의 가중치 통계를 사용했습니다. AL-31F M1 엔진의 질량은 "사실 이후"입니다. 등유 주입의 다른 백분율은 연료 탱크의 내부 공동의 절단 된 고체 상태 "캐스트"로 모델링되었습니다.
궤도 스테이지의 단순화 된 고체 모델도 개발되었다. 구조 요소의 질량은 "I"유닛 (Soyuz-2 발사체와 예상되는 Angara 발사체의 3 단계)에 대한 데이터를 기반으로하여 질량에 따라 고정 및 가변 구성 요소가 강조되었다 연료.
개발 된 항공기의 공기 역학 결과의 일부 특징 :
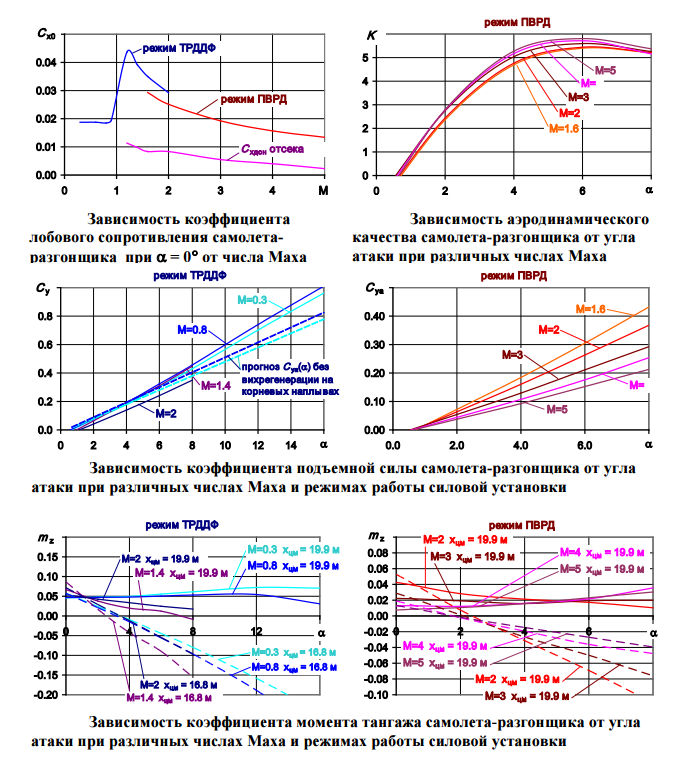
스프레더 평면에서 비행 범위를 늘리기 위해 램젯 아래에 구성 할 때 계획 모드가 사용되지만 연료를 공급하지는 않습니다. 이 모드에서는 노즐 - 증기선이 사용되어 서브 우퍼 채널 디퓨저의 추력이 노즐 저항과 같아 지도록 ESW 채널의 흐름을 제공하는 덕트 영역으로 램젯 엔진을 차단할 때 솔루션을 감소시킵니다.
Ddif ewm = hss ramjet. 간단히 말해, 조절 장치 작동 원리는 SHS-2 TsAGI 유형의 OVC를 테스트하기위한 설치에 사용됩니다. 서브 어셈블리 노즐 찜기는 TRDF 격실의 바닥 부분을 개방하며, 자체 바닥 저항을 생성하기 시작하지만, OVC 채널에서 초음속 흐름을 갖는 오프 스트림 램 제트의 저항보다 작습니다. SVS-2 TsAGI의 설치에 대한 EVZU의 테스트에서 마하 수 M = 1.3 인 공기 흡입구의 안정적인 작동이 나타 났으므로 1.3 ≤ M ≤ Mmax 범위에서 스태커 노즐을 ESD 스로틀로 사용하는 계획 모드가 가능하다고 주장 할 수 있습니다.
비행 특성 및 일반적인 비행 경로
스프레더 비행기의 임무는 고도, 비행 속도 및 궤도 각에서 비행 중 보드에서 궤도 발걸음을 시작하여 기준 궤도에서 페이로드의 최대 질량 조건을 충족시키는 것입니다. Hammer 프로젝트에 대한 예비 연구 단계에서, "언덕"기동을 사용하여 상승하는 지점에서 큰 양의 궤적 각도 값을 생성 할 때 최대 고도 및 비행 속도로이 항공기에 도달하는 것이 임무입니다. 이 경우, 페어링 질량을 줄이기 위해 스테이지 분리시의 속도 헤드를 최소화하고 개방 위치의 적재 하중 실에 가해지는 하중을 줄이기위한 조건이 설정됩니다.
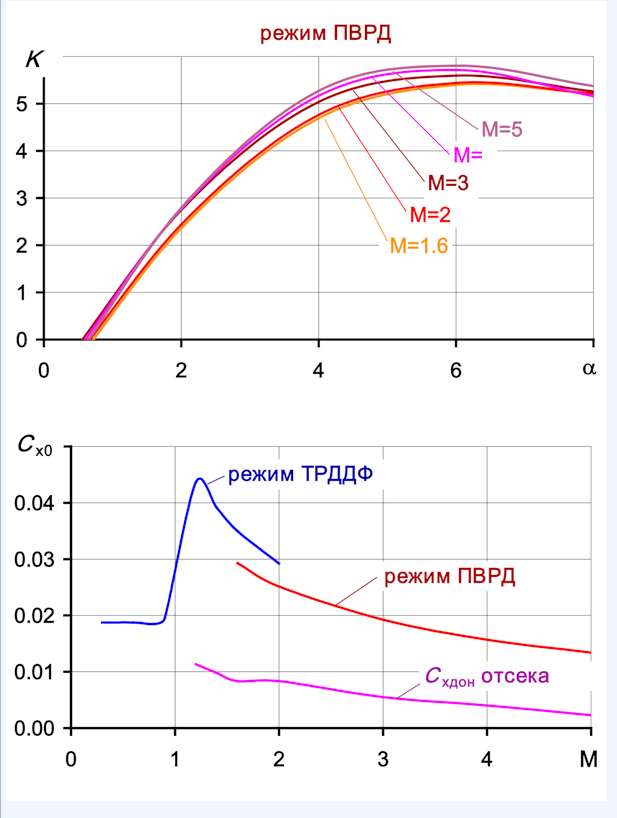
엔진 작동에 관한 초기 데이터는 AL-31F M31 엔진의 벤치 데이터로부터 보정 된 AL-1F의 비행 견인 및 경제적 특성뿐 아니라 연소 챔버 및 스크린 설치 각도에 비례하여 조정되는 원형 램젯의 특성이었습니다.
그림에서. 복합 발전소의 다양한 작동 모드에서 극 초음속 스프레더의 수평 안정 비행 영역이 표시됩니다.
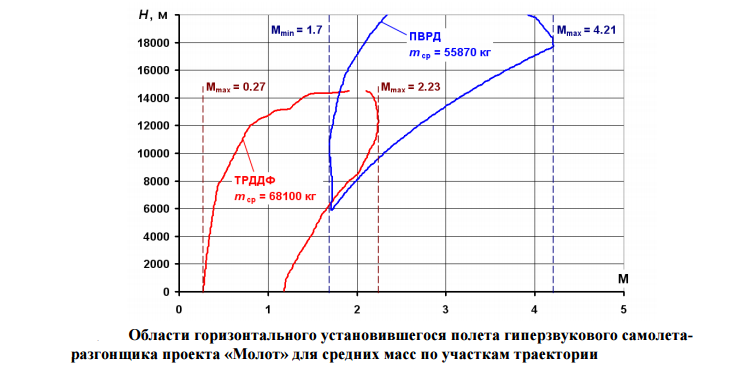
각 구역은 장치의 비행 질량 궤도 구간에 대한 평균 질량에 대한 "해머"프로젝트 스프레더의 해당 섹션에 대한 평균을 계산합니다. 발사체가 최대 마하 비행 횟수 M = 4.21에 도달하는 것을 볼 수 있으며, 터보 제트 엔진에서 비행 할 때 마하 수는 M = 2.23로 제한됩니다. 그래프는 프로토 타입의 스크린 흡기 장치에서 작업하는 동안 실험적으로 달성되고 결정된 광범위한 마하 수를 램젯 추진 시스템에 제공 할 필요성을 보여줍니다. 이륙 속도는 분리 속도 V = 360 m / s로 수행된다. 날개와 스크린의 베어링 특성은 이륙 및 착륙 기계화 및 엘리베이터의 호버링을 사용하지 않고도 충분하다. 수평 구간 H = 10 700 m에서 최적의 상승 후, 발사체의 항공기는 초음속 Mach 음속 M = 0.9로 이동하여 M = 2에서 예비 동력기를, M = 2.46에서 예비 가속도를 Vopt로 전환합니다. 램 제트를 타고 올라가는 과정에서 스프레더 평면은 가정 비행장으로 돌아가 마하 수 M = 0 인 높이 H20peak = 000 3.73 m에 도달합니다.
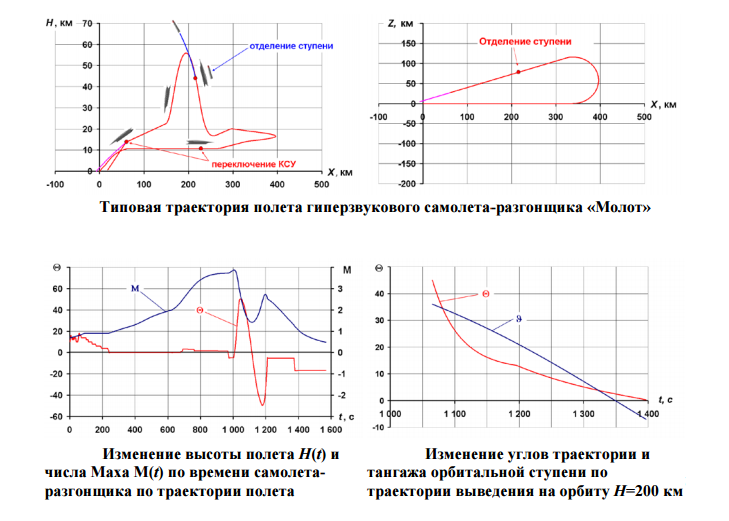
이 고도에서, 동적 기동은 궤도 스테이지 발사를위한 최대 비행 고도 및 궤적 각도에 도달하기 시작합니다. 부드러운 다이빙은 M = 3.9 가속과 후속 "슬라이드"기동으로 수행됩니다. 램젯 엔드는 높이 H ≈ 25000 m에서 작동하며 후속 상승은 스프레더의 운동 에너지로 인한 것입니다. 궤도 스테이지의 발사는 마하 수 M = 44 및 궤도 각도 θ = 049 ° 인 높이 H trigger = 2.05 45 m에서 궤적의 상승 분기에서 발생합니다. 스프레더는 "언덕"에서 Hmax = 55 871 m의 높이에 도달합니다. 궤적의 하강 지점에서 마하 수 M = 1.3에 도달하면 ramjet → TRDF가 ramjet 공기 흡입구를 제거하기 위해 전환됩니다.
TRDF의 구성에서, 스프레더는 GGZT = 1000 kg의 연료 공급이있는 활공 경로에 도달 할 계획입니다.
일반 모드에서는 계획 범위 내에서 예비가있는 엔진을 사용하지 않고 착륙 전에 램젯이 정지 한 순간부터 전체 비행이 발생합니다.
이 그림에는 스텝 동작의 각도 매개 변수의 변경 내용이 표시되어 있습니다.
속도 V = 200 114 m / s에서 높이 H = 878 3 m에서 원형 궤도 H = 291 km에 배치되면 첫 번째 하위 단계의 가속기가 분리됩니다. 궤도 H = 200 km에있는 하중을 가진 두 번째 하위 단계의 질량은 1504 kg이며,이 중 하중은 mpg = 767 kg입니다.
Molot 프로젝트의 극 초음속 항공기의 적용 패턴과 비행 경로는 정부 기관인 DARPA의 지원을 받아 창안 된 미국의 "대학"프로젝트 RASCAL과 유사합니다.
Molot 및 RASCAL 프로젝트의 특정 특징은 저속 헤드에서 궤도 단계 Нpusk ≈ 50m의 높은 발사 고도에 수동적으로 접근 할 수있는 "슬라이드"유형의 동적 기동을 사용하는 것입니다. 발사 고도는 값 비싼 일회용 궤도 단계, 즉 총 질량의 중력 손실과 비행 시간을 줄일 수 있습니다. 초경량 시스템 (mпгН000 <24kg)에 필수적인 소형 고속 런치 헤드는 페이로드 페어링의 질량을 최소화하거나 경우에 따라 거부 할 수도 있습니다.
RASCAL에 비해 Hammer 프로젝트 부스터 항공기의 가장 큰 장점은 온보드 액체 산소 매장량이 없다는 것입니다. 항공 재사용 가능한 극저온 탱크. 램젯 엔진 작동 모드의 추력 대 중량 비율을 통해 Molot 부스터는 궤도 각도 θ 발사 ≈ 45 °의 궤도 단계에 대해 "작업자"의 "슬라이드"상승 분기에 도달 할 수 있으며 RASCAL 가속기는 시작 궤도 각도 만 θ 발사 ≈ 20 °와 함께 궤도 단계를 제공합니다. 스텝 회전 기동으로 인한 손실.
해머 극 초음속 무인 프로펠러가 장착 된 항공 우주 시스템은 특정 적재 용량 측면에서 RASCAL 시스템을 능가합니다 : (mphN500 / mvzl) 해머 = 0.93 %, (mpnn486 / mvzl) rascal = 0.25 %.
따라서, 국내 항공 우주 산업에 의해 개발되고 마스터 된 아음속 연소 챔버 (Hammer 프로젝트의 핵심) 인 다이렉트 플로우 제트 엔진의 기술은 극 초음속 스프레더의 효율면에서 TRDF 공기 흡입 시스템에 대한 미국의 MIPCC 기술을 뛰어 넘습니다.
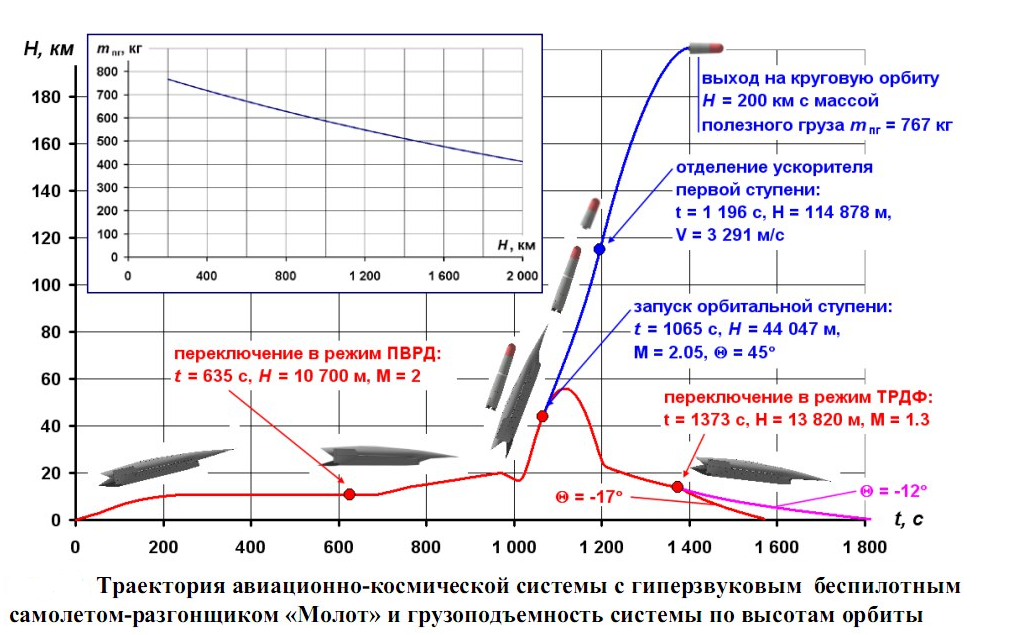
극 초음속 무인 공중 차량 무게 74 000 kg은 비행장에서의 이륙, 가속, 낙차 지점에서 높이 H = 20 000 m 및 M = 3.73까지 중간 궤도를 따라 최적화 된 궤적을 따라 등반하며 캐노피에서 중간 가속도를 갖는 동적 슬라이드 형 기동 M = 3.9에 뛰어 들라. 궤적의 상승 분지에서, H = 44 047 m, M = 2 일 때, RD-18 엔진에 기초하여 설계된 질량 508 0124 kg의 2 단계 궤도 스테이지가 분리된다.
계획 모드에서 "슬라이드"Hmax = 55 871 m을 지나면 가속기는 1000 kg의 연료와 36 579 kg의 착륙 중량을 보장하면서 비행장으로 날아갑니다. 궤도 스테이지는 H = 200km mbg = 767 kg에 질량 궤도 = 500 kg의 하중을 가하는 원형 궤도 H = 686 km에 놓입니다.
도움말.
1 : NPO Molniya의 실험실 및 테스트 기지에는 다음 실험실 단지가 포함됩니다.
정적 강도 시험실
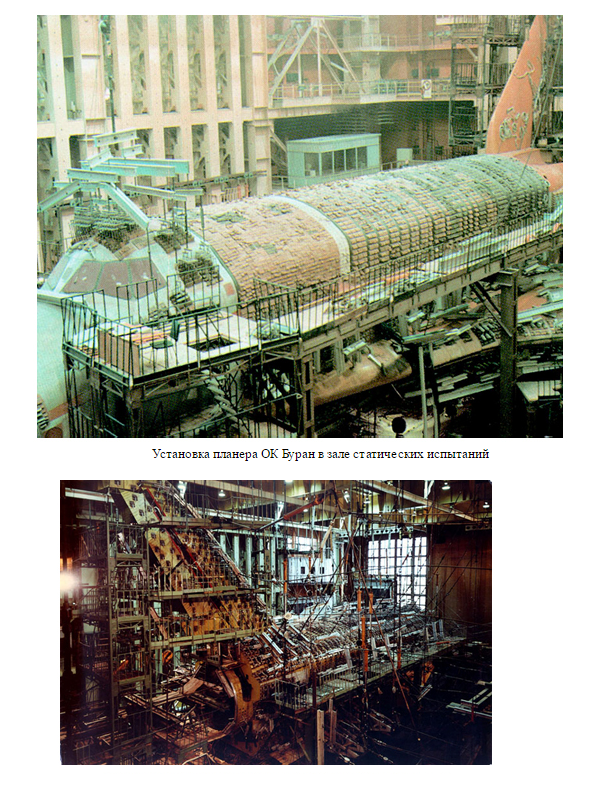
실험실 역학 테스트
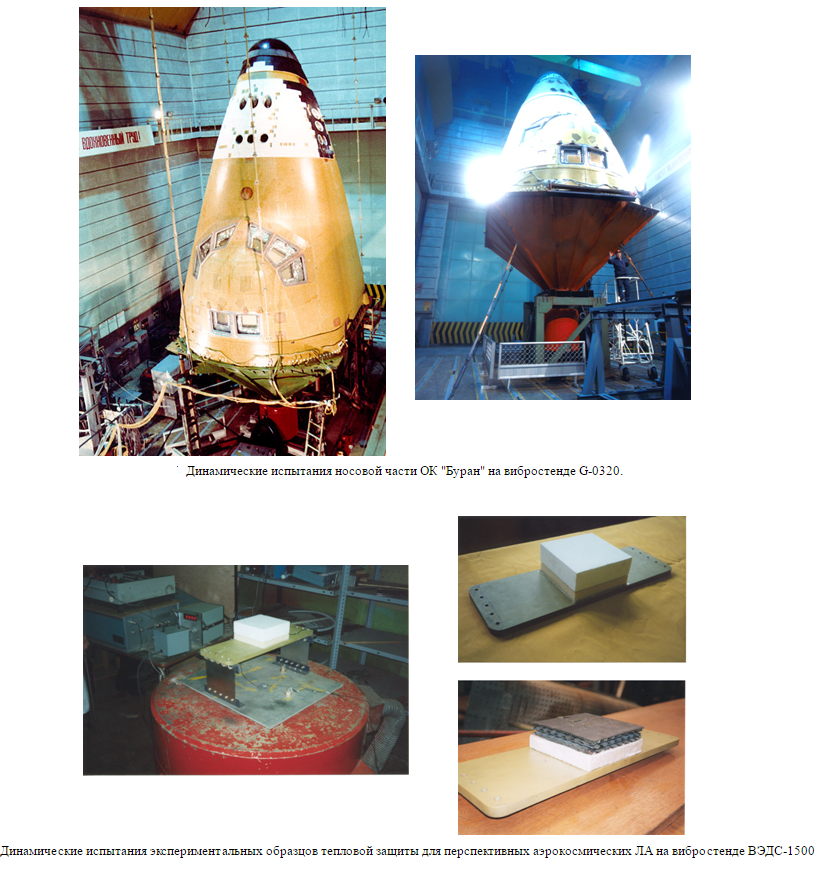
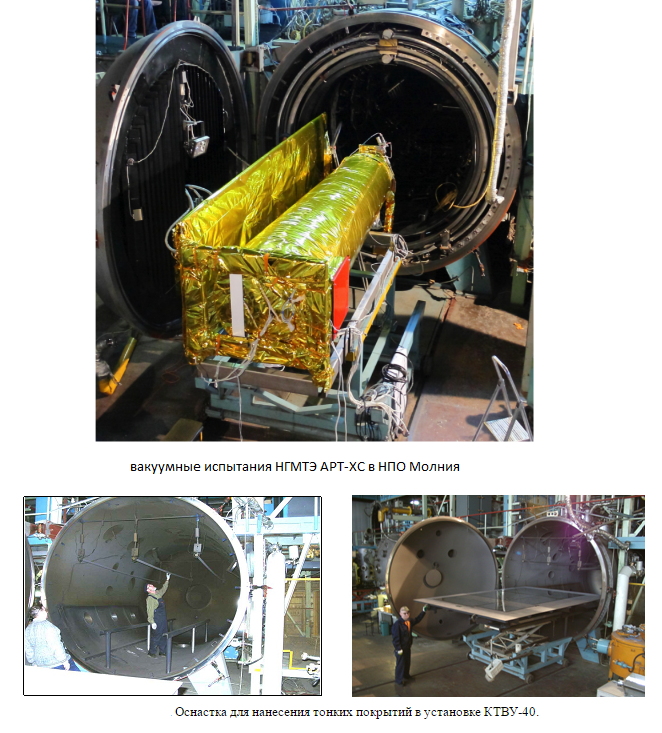
저온 진공 테스트 실험실
기후 실험 연구소
마찰 시험실
2.A 이것은 고속 민간 항공기 HEXAFLY-INT의 프로젝트입니다.

가장 큰 국제 협력 프로젝트 중 하나입니다. 그것은 유럽 (ESA, ONERA, DLR, CIRA 및 기타), 러시아어 (Tsagi, CIAM, LII, MIPT) 및 호주 (시드니 대학 등) 조직의 주요 유럽인을 포함합니다.

3. Rostec은 우주 왕복선 "Buran"을 개발 한 회사의 파산을 허용하지 않았습니다.
참고 : 기사 시작 부분의 3-D 모델은 Hammer R & D와 아무 관련이 없습니다.
기사 기반 작업 :
스크린 터보 - 라지 제트 발전소가 결합 된 극 초음속 무인 프로펠러의 "해머 (Hammer)"프로젝트
/ 모스크바의 항공 연구소 (Volvoolamskoye Highway, 4, 모스크바, A-80, GSP-3, 125993, 러시아), Chibisov Ya.N. (JSC Scientific 생산 협회 "번개") /
중고 재료, 사진 및 비디오
http://www.mai.ru/
http://www.ciam.ru/
http://www.npomolniya.ru/
http://en.avia.pro/
http://www.darpa.mil/
www.youtube.com
http://otvaga2004.ru/
http://www.3dmir.ru/forum/read/5075.html
http://www.globalsecurity.org/
http://36on.ru/news/economics/64320-v-sovete-federatsii-proshli-dni-voronezhskoy-oblast
정보