Zaporozhye 회사는 우크라이나 군대를 위한 새로운 로봇 플랫폼 "Please"를 제공했습니다.
우크라이나 사이트가 오늘 보도한 바와 같이 우크라이나 군사 페이지, Zaporozhye 회사 "Infocom Ltd"는 군사 목적의 무인 지상 차량 복합 요소 중 하나로 지상 전투 로봇 플랫폼 (BRP) "PLEASE"를 만드는 개념을 제안했습니다. 우크라이나 군대의 지상군.
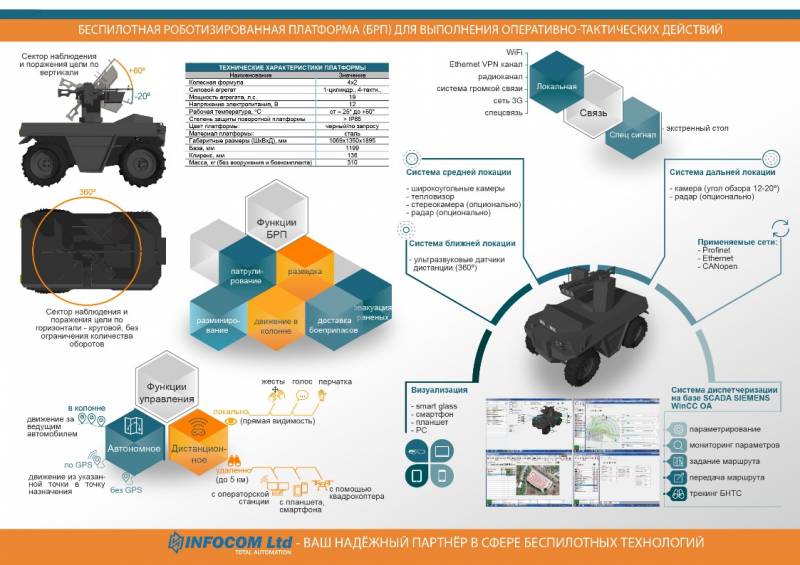
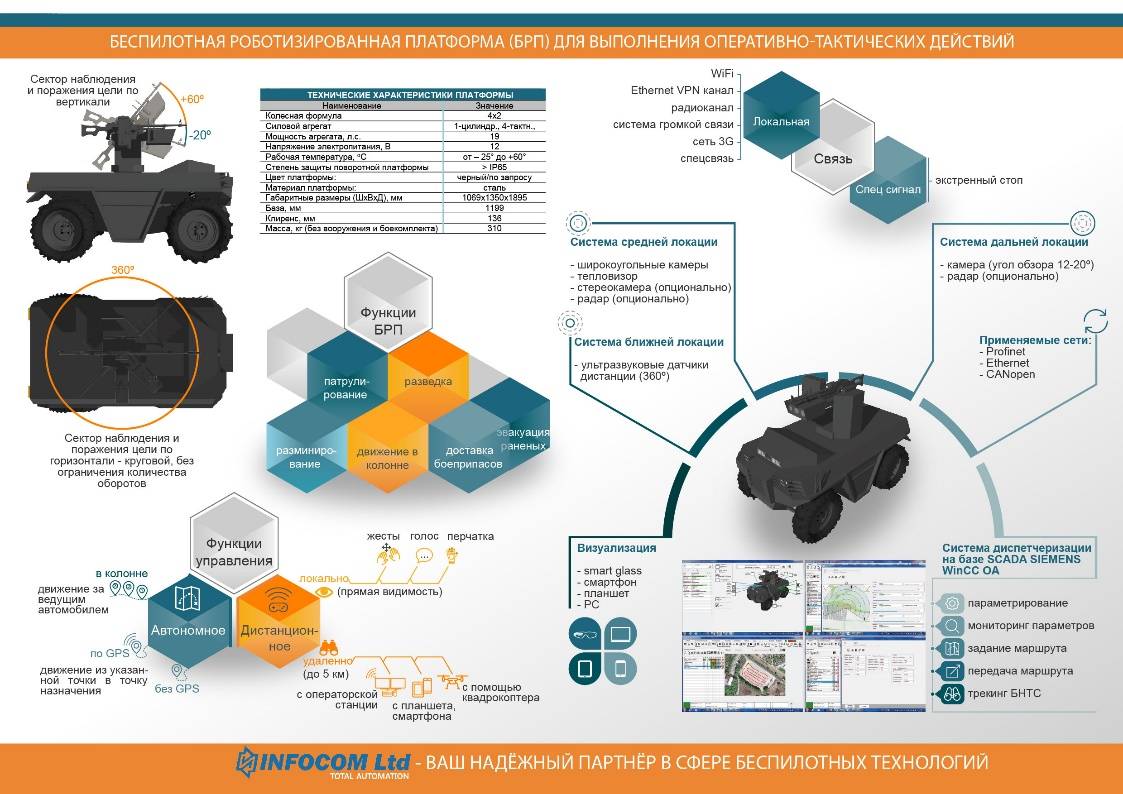
BRP "PLEASE"의 개발 목적은 자동 포탑이 있는 효과적인 모바일 로봇 플랫폼을 만들어 작전-전술 전투 작전을 수행하고 주어진 영토의 경계를 보호하고 보호하며 시도를 식별하고 방지하는 것입니다. 위반자가 보호 구역에 무단으로 들어가는 것.

전투 로봇 플랫폼 "PLEASE"는 7,62mm PKM이 설치된 자동 포탑 형태로 구조적으로 구현되며 전투 차량에 사용하기 위해 고정식(FP01 및 MP01)의 두 가지 버전으로 제공됩니다.
BNTS 기반의 MP01 전투 플랫폼 구현으로 포탑의 기동성과 기능성을 높여 포탑 활용 효율을 높였으며, 특히 전투임무(정찰, 지뢰제거, 전투방호) 수행 시 이동 중인 부대에 동행할 수 있는 능력을 제공한다. , 공격, 지역 순찰, 재배치, 화물 호위, 부상자 대피 등).
전투 로봇 플랫폼의 기능적 작업을 수행하기 위해 ATV 섀시가 기본 차량으로 사용되었습니다.
휠 공식 : 4x2
동력 장치: 디젤 단일 실린더 4 행정 엔진
유닛 전력: 19k.s. (14kW)
온보드 네트워크 전압: 12V
플랫폼 재질: 강철
턴테이블 보호 등급: > IP65
크기(LxWxH): 1895x1069x1350mm
기본, mm 1 199
지상고 : 136 mm
절전 : 100 km
최대 속도 : 80의 km / h
무게 : 310의 kg
통신 채널에 대한 적의 전자 시스템의 영향에 대한 보호 수단을 사용하여 BRP "PLEASE"의 제어는 원격으로 수행됩니다.
태블릿에서(라디오 채널, f = 433MHz - 거리 300m);
운전실에서(AirMax, f = 5GHz - 최대 5000m);
제스처(비디오 채널 - 시선 거리);
"전자 케이블" 모드(비디오 채널 - 시선 거리);
전자 장갑 사용(라디오 채널, f = 868MHz - 거리 300m);
마이크에 명령을 내리는 음성으로 (라디오 채널, f = 433MHz - 거리 300m);
BRP의 자율적 움직임. 작동 모드:
GPS 채널을 사용하여 기준점을 확인하여 방위각 경로를 따라 이동
경로의 암기(자동 고정);
고정된 경로를 따라 이동;
"홈"방식에 따른 이동 - 고정 경로를 따라 (시작점으로 돌아 가기);
열에서 이동("슬레이브" 및 "리딩" 모드).
BRP "PLEASE"의 개발 목적은 자동 포탑이 있는 효과적인 모바일 로봇 플랫폼을 만들어 작전-전술 전투 작전을 수행하고 주어진 영토의 경계를 보호하고 보호하며 시도를 식별하고 방지하는 것입니다. 위반자가 보호 구역에 무단으로 들어가는 것.

모바일 전투 로봇 플랫폼 "PLEASE"
전투 로봇 플랫폼 "PLEASE"는 7,62mm PKM이 설치된 자동 포탑 형태로 구조적으로 구현되며 전투 차량에 사용하기 위해 고정식(FP01 및 MP01)의 두 가지 버전으로 제공됩니다.
BNTS 기반의 MP01 전투 플랫폼 구현으로 포탑의 기동성과 기능성을 높여 포탑 활용 효율을 높였으며, 특히 전투임무(정찰, 지뢰제거, 전투방호) 수행 시 이동 중인 부대에 동행할 수 있는 능력을 제공한다. , 공격, 지역 순찰, 재배치, 화물 호위, 부상자 대피 등).
전투 로봇 플랫폼의 기능적 작업을 수행하기 위해 ATV 섀시가 기본 차량으로 사용되었습니다.
휠 공식 : 4x2
동력 장치: 디젤 단일 실린더 4 행정 엔진
유닛 전력: 19k.s. (14kW)
온보드 네트워크 전압: 12V
플랫폼 재질: 강철
턴테이블 보호 등급: > IP65
크기(LxWxH): 1895x1069x1350mm
기본, mm 1 199
지상고 : 136 mm
절전 : 100 km
최대 속도 : 80의 km / h
무게 : 310의 kg
통신 채널에 대한 적의 전자 시스템의 영향에 대한 보호 수단을 사용하여 BRP "PLEASE"의 제어는 원격으로 수행됩니다.
태블릿에서(라디오 채널, f = 433MHz - 거리 300m);
운전실에서(AirMax, f = 5GHz - 최대 5000m);
제스처(비디오 채널 - 시선 거리);
"전자 케이블" 모드(비디오 채널 - 시선 거리);
전자 장갑 사용(라디오 채널, f = 868MHz - 거리 300m);
마이크에 명령을 내리는 음성으로 (라디오 채널, f = 433MHz - 거리 300m);
BRP의 자율적 움직임. 작동 모드:
GPS 채널을 사용하여 기준점을 확인하여 방위각 경로를 따라 이동
경로의 암기(자동 고정);
고정된 경로를 따라 이동;
"홈"방식에 따른 이동 - 고정 경로를 따라 (시작점으로 돌아 가기);
열에서 이동("슬레이브" 및 "리딩" 모드).
정보