천천히 그러나 영구적 인 외골격 발판
외골격 분야에서 일을 시작한 지 반세기가 지난이 장비의 첫 샘플은 본격적인 작업에 들어갈 준비가되었습니다. 록히드 마틴은 최근 HULC 프로젝트 (Human Universal Load Carrier - 사람을위한 유니버셜 로딩 캐리어 시스템)가 국방부에서 실시한 현장 테스트를 통과했을뿐만 아니라 양산 준비가되었음을 자랑했습니다. 외골격 HULC는 이제 다른 회사의 유사한 프로젝트를 즉시 "호흡합니다." 그러나 그러한 구조의 풍부는 항상 그런 것은 아닙니다.

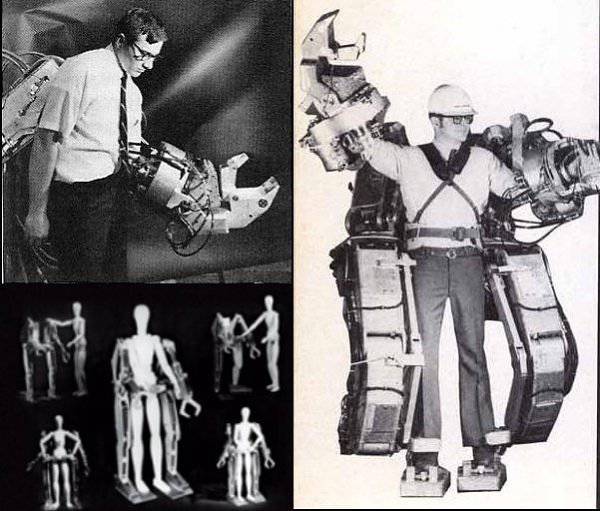
사실 인간이 착용 할 수 있고 신체의 질을 크게 향상시킬 수있는 장치를 만드는 아이디어는 지난 세기 전반기에 나타났습니다. 그러나 특정 시간까지는 공상 과학 작가들의 또 다른 개념이었습니다. 실질적으로 적용 가능한 시스템의 개발은 50 대 후반에 시작되었다. 미 제너럴 일렉트릭의 회사 인 미 제너럴 일렉트릭 (General Electric)은 Hardiman이라는 프로젝트를 시작했습니다. 기술 작업은 대담했습니다. GE의 외골격은 최대 1 천 5 백 파운드 (약 680 킬로그램)의 하중으로 작업 할 수 있도록되어있었습니다. 프로젝트를 성공적으로 완료 한 경우 Exoskeleton Hardiman은 놀라운 전망을 보였습니다. 그래서 군대는 공군에서 총포 대장의 작업을 용이하게하기 위해 새로운 장비를 사용할 계획이었습니다. 또한 핵 과학자, 건설업자 및 기타 산업계의 대표들이 "줄을 서서"나아갔습니다. 그러나 프로그램 시작 10 년 후에도 제너럴 일렉트릭 엔지니어는 금속으로 계획된 모든 것을 구현하는 데 성공하지 못했습니다. 작동하는 기계식 팔을 포함하여 몇 가지 프로토 타입이 제작되었습니다. Hardymena의 거대한 발톱에는 유압 구동 장치가 있었으며 750 파운드의화물을 들어 올릴 수있었습니다 (약 340 kg). 하나의 "장갑"을 기반으로 두 번째 장갑을 만들 수있었습니다. 그러나 디자이너에게는 또 다른 문제가있었습니다. 외골격의 기계적 "다리"가 제대로 작동하기를 원하지 않았습니다. 한 팔과 두 다리가 달린 Hardiman 프로토 타입은 750 킬로그램 이하로 무게가 나가는 반면 계산 된 최대 운반 능력은 자체 무게보다 적습니다. 이 무게와 하중을 들어 올릴 때 외골격의 중심 맞춤 기능으로 인해 종종 전체 구조가 진동하기 시작하여 몇 차례 기울어졌습니다. 이 프로젝트의 저자들은이 현상을 "성 비투스의 기계적 춤"이라고 불렀다. 제너럴 일렉트릭의 디자이너들이 어떻게 싸웠는지간에, 그들은 센터링과 진동에 대처할 수 없었습니다. Hardman은 70-x 프로젝트 초기에 폐쇄되었습니다.
그 후 몇 년 동안 외골격의 방향으로의 작업이 중단되었습니다. 때로는 다양한 조직에 참여하기 시작했지만, 거의 항상 적절한 결과가 따르지 않았습니다. 동시에, 외골격을 만드는 목적이 항상 군대에서 사용되는 것은 아닙니다. 70-ies의 Massachusetts Technological University 직원은 근골격계 부상으로 장애인 재활을 목적으로 비슷한 등급의 장비를 개발했습니다. 불행하게도, 다양한 의상 유니트의 동기화 문제도 엔지니어의 길에있었습니다. 외골격에는 생성하기 쉬운 특징이 몇 가지 있습니다. 따라서, 작업자의 신체 능력을 크게 향상 시키려면 적절한 에너지 원이 필요합니다. 후자는 차례로 전체 장치의 크기 및 중량을 증가시킨다. 두 번째 장애는 사람과 외골격의 상호 작용에 있습니다. 이러한 장비의 작동 원리는 다음과 같습니다 : 사람이 손이나 발로 어떤 움직임을 수행합니다. 사지와 관련된 특수 센서가이 신호를 수신하고 유압 또는 전기 메커니즘 인 액추에이터에 적절한 명령을 전송합니다. 명령과 동시에 동일한 센서가 조작기의 움직임이 조작자의 움직임과 일치하는지 확인합니다. 동작 진폭의 동기화 외에도 엔지니어는 임시 통신 문제에 직면 해 있습니다. 사실 모든 기계공은 반응 시간이 있습니다. 따라서 외골격의 사용이 충분히 용이하다는 목표로 최소화해야합니다. 현재 강조되고있는 작고 조밀 한 외골격의 경우 인간과 기계 운동의 동기화가 특별한 우선 순위를 갖습니다. 조밀 한 외골격은지지 표면 등을 증가시키지 못하기 때문에, 사람과 움직일 시간이없는 역학은 사용에 악영향을 줄 수 있습니다. 예를 들어 기계식 "다리"의시기 적절하지 않은 움직임은 단순히 사람이 균형을 잃어 버리거나 떨어지는 사실로 이어질 수 있습니다. 그리고 이것이 모든 문제는 아닙니다. 분명히, 사람의 발은 손과 손가락은 말할 것도없고 팔보다 자유도가 적습니다.
최신 역사 군사 외골격은 2000 년에 시작되었습니다. 그런 다음 미국 기관 DARPA는 EHPA 프로그램 (인간 성능 향상을위한 외골격 - 인간 생산성 향상을위한 외골격)의 시작을 시작했습니다. EHPA 프로그램은 미래의 군인 이미지를 만드는 데 참여한 더 큰 Land Warrior 프로젝트의 일부였습니다. 그러나 2007에서는 Land Warrior가 취소되었지만 그 외골격 부분은 계속되었습니다. EHPA 프로젝트의 목표는 소위 말하는 것을 만드는 것이 었습니다. 완성 된 외골격은 사람의 손과 발을 구성하는 앰플리파이어를 가지고있었습니다. 동시에 무기 나 예약은 필요하지 않았습니다. DARPA와 펜타곤의 책임자들은 외골격 분야의 현 상황이 단순히 부가적인 기능을 갖추는 것을 허용하지 않는다는 것을 완전히 이해했다. 따라서 EHPA 프로그램의 기술적 임무는 약 100 킬로그램의 무게와 운동 속도를 증가시키는화물의 외골격에 군인이 장기간 운반 할 수 있음을 의미합니다.
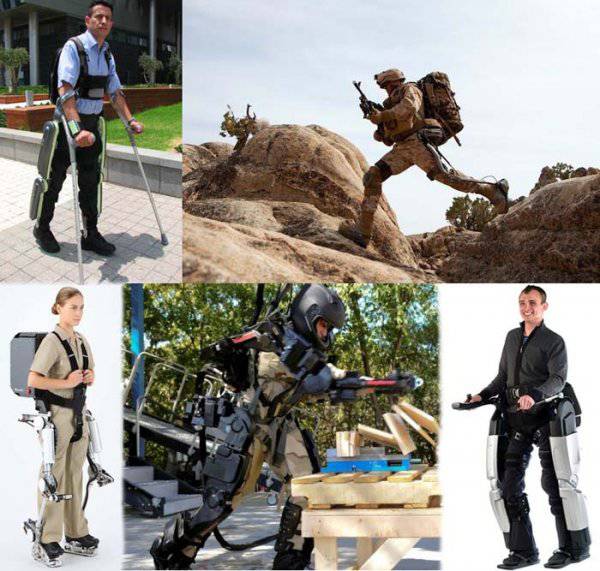
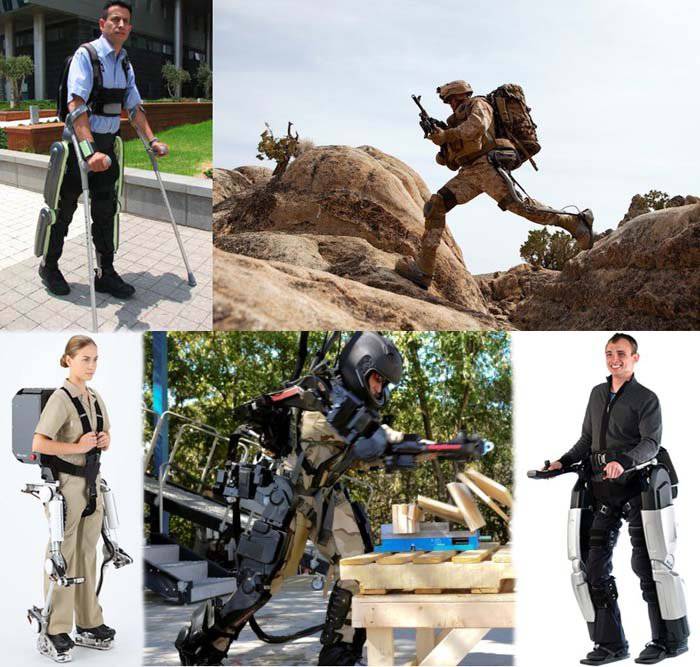
Sacros와 University of Berkeley (미국) 및 일본 사이버 다인 시스템 (Cyberdyne Systems)은 신기술 개발에 참여하기를 희망했습니다. 프로그램이 시작된 이래로 12 년이 지났으며이 기간 동안 참가자 목록에 약간의 변화가있었습니다. 지금까지 Sacros는 Raytheon의 일원이되었으며 Berkeley Bionics라는 대학 부서는 Lockheed Martin의 한 부서가되었습니다. 어쨌든 이제는 EHPA 프로그램에 의해 생성 된 외골격의 3 가지 프로토 타입이 있습니다 : Lockheed Martin HULC, Cyberdyne HAL 및 Raytheon XOS.
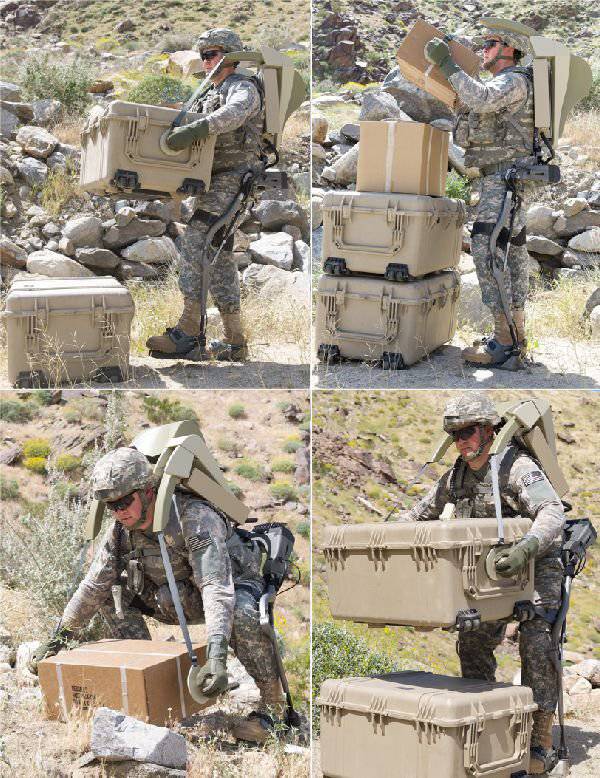
이러한 외골격의 첫 번째 요소 인 HULC는 DARPA의 요구 사항을 완전히 충족하지 못합니다. 사실 25-kilogram 디자인에는 등받이 시스템과 기계식 "다리"만 있습니다. HULC의 손 지원은 구현되지 않았습니다. 동시에 HULC 운영자의 신체 기능은 등지지 시스템을 통해 손에 대한 대부분의 하중이 외골격의 힘 요소로 전달되어 궁극적으로지면에 도달 함으로 인해 향상됩니다. 적용된 시스템 덕분에 병사들은 최대 90 킬로그램의화물을 운반 할 수 있으며 동시에 모든 군 표준을 충족시키는 하중을 경험할 수 있습니다. HULC에는 8 시간 동안 작동 할 수있는 용량의 리튬 이온 배터리가 장착되어 있습니다. 절약 모드에서는 외골격에있는 사람이 시속 4-5 킬로미터의 속도로 걸을 수 있습니다. 가능한 최대 HULC 속도는 17-18 km / h이지만 시스템 작동 모드는 단일 배터리 충전의 작동 시간을 크게 줄입니다. 미래에는 록히드 마틴 (Lockheed Martin)이 HULC에 연료 전지를 장착 할 것을 약속합니다. 그 용량은 하루 동안 충분할 것입니다. 또한 향후 버전에서는 설계자가 손을 "로봇 화"할 것을 약속함으로써 사용자의 외골격 능력을 크게 향상시킬 것입니다.

회사 Raytheon은 현재 XOS-1 및 XOS-2 지수를 사용하여 유사한 외골격을 어느 정도 발표했습니다. 그것들은 무게와 크기의 매개 변수가 다르며 결과적으로 여러 가지 실질적인 특징이 있습니다. HULC와는 달리 XOS 제품군에는 손 하역 시스템이 장착되어 있습니다. 이 두 가지 외골격은 80-90 약 1 킬로그램의 자신의 체중에 필적하는 체중을 들어 올릴 수 있습니다. 두 XOS의 설계로 기계식 암에 다양한 매니퓰레이터를 설치할 수 있다는 점은 주목할만한 사실입니다. XOS-1과 XOS-2는 지금까지 상당한 전력 소비를 가지고 있음을 주목해야합니다. 이 때문에 그들은 아직 자율적이지 않고 외부의 힘이 필요합니다. 따라서, 스피치의 최대 이동 속도 및 배터리 수명은 아직 아니다. 그러나 Raytheon에 따르면 케이블을 통한 전력 공급의 필요성은 적절한 전기 공급원이있는 창고 또는 군 기지에서 XOS를 사용하는 데 장애가되지는 않습니다.

EHPA 프로그램의 세 번째 샘플은 Cyberdyne HAL입니다. 현재까지 실제 버전은 HAL-5입니다. 이 외골격은 처음 두 개가 어느 정도 혼합되어 있습니다. HULC처럼 자율적으로 사용할 수 있습니다. 2,5-3 시간 동안 배터리 수명이 충분합니다. XOS 제품군을 통해 Cyberdyne Systems는 디자인의 "충만 함"을 결합합니다. 이는 팔과 다리 모두를위한 지원 시스템을 포함합니다. 그러나 HAL-5의 운반 능력은 수십 킬로그램을 초과하지 않습니다. 마찬가지로,이 개발의 속도 특성과 상황. 사실 일본인 디자이너들은 군대에 집중하지 않고 장애인 재활에 집중했다. 분명히 이러한 사용자는 고속 또는 용량이 필요하지 않습니다. 따라서 현 상태의 HAL-5이 군대에 관심이 있다면 군대 사용을 위해 날카롭게 된 새로운 외골격을 기초로 할 수 있습니다.
EHPA 대회에 제출 된 유망한 외골격의 모든 변종 중 HULC만이 군대와 함께 시험에 도달했습니다. 다른 프로젝트의 많은 기능은 여전히 현장 시험을 시작할 수 없습니다. 9 월에는 실제 상황에서 외골격 작업의 특성을 연구하기 위해 여러 세트의 HULC가 부서로 보내집니다. 모든 것이 원활하게 진행되면 2014-15에서 대량 생산이 시작됩니다.
그 사이에, 과학자와 디자이너는 더 진보 된 개념 및 디자인이있을 것이다. 외골격 분야에서 가장 기대되는 혁신은 로봇 장갑입니다. 기존 매니퓰레이터는 도구 및 이와 유사한 도구를 사용하여 수동으로 사용하기에는 아직 그다지 편리하지 않습니다. 또한, 이러한 장갑의 생성은 많은 어려움과 관련되어있다. 일반적으로 이들은 다른 외골격 골재와 유사하지만이 경우 동기화 문제는 많은 수의 기계 요소, 인간의 손 움직임의 특징 등에 의해 악화됩니다. 외골격의 발전의 다음 단계는 신경 전자 인터페이스의 생성 일 것입니다. 이제 역학의 움직임은 센서 및 추적 드라이브에 의해 제어됩니다. 엔지니어와 과학자에게보다 편리한 것은 인간의 신경 자극을 제거하는 전극이있는 제어 시스템을 사용하는 것입니다. 무엇보다도 이러한 시스템은 메커니즘의 반응 시간을 줄여 결과적으로 전체 외골격의 효율성을 높입니다.
실제적인 적용에 관해서는, 지난 반세기 동안, 그것에 대한 견해는 거의 변하지 않았습니다. 유망한 시스템의 주요 사용자는 여전히 군대로 간주됩니다. 그들은 적재 및 하역, 탄약 준비 및 전투 상황에서 전투기의 기능을 향상시키기 위해 외골격을 사용할 수 있습니다. 외골격의 운반 능력은 군대뿐만 아니라 유용 할 것이다. 사람이 신체 기능을 크게 향상시킬 수있는 광범위한 기술 배포로 모든 물류 및화물의 모양을 바꿀 수 있습니다. 예를 들어, 지게차가없는 상태에서화물 반 트레일러를 적재하는 시간은 수십 퍼센트 감소 할 것이고, 이는 전체 운송 시스템의 효율성을 증가시킬 것입니다. 마지막으로, 신경 자극에 의해 제어되는 외골격은 장애인 opornikami가 전 생애를 다시 살 수 있도록 도와줍니다. 또한, 신경 전자 인터페이스에 높은 기대를 걸고 있습니다 : 척추 부상 등. 뇌의 상해 신호는 신체의 특정 부분에 도달하지 않을 수 있습니다. 손상된 신경 영역으로 그들을 가로 채고 외골격의 제어 시스템으로 보내면 더 이상 휠체어 나 침대에 갇히지 않게됩니다. 따라서 군대 개발은 군대의 삶을 향상시킬 수 있습니다. 지금 당장은 큰 계획을 세우는 동안 가을에 시작될 록히드 마틴 HULC 외골격의 파일럿 작동에 대해 기억해야합니다. 그 결과에 따르면 전체 산업의 잠재 고객과 잠재적 인 사용자의 관심을 판단 할 수 있습니다.
해당 사이트의 자료 :
http://darpa.mil/
http://davidszondy.com/
http://lockheedmartin.com/
http://raytheon.com/
http://cyberdyne.jp/
http://rosbalt.ru/
사실 인간이 착용 할 수 있고 신체의 질을 크게 향상시킬 수있는 장치를 만드는 아이디어는 지난 세기 전반기에 나타났습니다. 그러나 특정 시간까지는 공상 과학 작가들의 또 다른 개념이었습니다. 실질적으로 적용 가능한 시스템의 개발은 50 대 후반에 시작되었다. 미 제너럴 일렉트릭의 회사 인 미 제너럴 일렉트릭 (General Electric)은 Hardiman이라는 프로젝트를 시작했습니다. 기술 작업은 대담했습니다. GE의 외골격은 최대 1 천 5 백 파운드 (약 680 킬로그램)의 하중으로 작업 할 수 있도록되어있었습니다. 프로젝트를 성공적으로 완료 한 경우 Exoskeleton Hardiman은 놀라운 전망을 보였습니다. 그래서 군대는 공군에서 총포 대장의 작업을 용이하게하기 위해 새로운 장비를 사용할 계획이었습니다. 또한 핵 과학자, 건설업자 및 기타 산업계의 대표들이 "줄을 서서"나아갔습니다. 그러나 프로그램 시작 10 년 후에도 제너럴 일렉트릭 엔지니어는 금속으로 계획된 모든 것을 구현하는 데 성공하지 못했습니다. 작동하는 기계식 팔을 포함하여 몇 가지 프로토 타입이 제작되었습니다. Hardymena의 거대한 발톱에는 유압 구동 장치가 있었으며 750 파운드의화물을 들어 올릴 수있었습니다 (약 340 kg). 하나의 "장갑"을 기반으로 두 번째 장갑을 만들 수있었습니다. 그러나 디자이너에게는 또 다른 문제가있었습니다. 외골격의 기계적 "다리"가 제대로 작동하기를 원하지 않았습니다. 한 팔과 두 다리가 달린 Hardiman 프로토 타입은 750 킬로그램 이하로 무게가 나가는 반면 계산 된 최대 운반 능력은 자체 무게보다 적습니다. 이 무게와 하중을 들어 올릴 때 외골격의 중심 맞춤 기능으로 인해 종종 전체 구조가 진동하기 시작하여 몇 차례 기울어졌습니다. 이 프로젝트의 저자들은이 현상을 "성 비투스의 기계적 춤"이라고 불렀다. 제너럴 일렉트릭의 디자이너들이 어떻게 싸웠는지간에, 그들은 센터링과 진동에 대처할 수 없었습니다. Hardman은 70-x 프로젝트 초기에 폐쇄되었습니다.
그 후 몇 년 동안 외골격의 방향으로의 작업이 중단되었습니다. 때로는 다양한 조직에 참여하기 시작했지만, 거의 항상 적절한 결과가 따르지 않았습니다. 동시에, 외골격을 만드는 목적이 항상 군대에서 사용되는 것은 아닙니다. 70-ies의 Massachusetts Technological University 직원은 근골격계 부상으로 장애인 재활을 목적으로 비슷한 등급의 장비를 개발했습니다. 불행하게도, 다양한 의상 유니트의 동기화 문제도 엔지니어의 길에있었습니다. 외골격에는 생성하기 쉬운 특징이 몇 가지 있습니다. 따라서, 작업자의 신체 능력을 크게 향상 시키려면 적절한 에너지 원이 필요합니다. 후자는 차례로 전체 장치의 크기 및 중량을 증가시킨다. 두 번째 장애는 사람과 외골격의 상호 작용에 있습니다. 이러한 장비의 작동 원리는 다음과 같습니다 : 사람이 손이나 발로 어떤 움직임을 수행합니다. 사지와 관련된 특수 센서가이 신호를 수신하고 유압 또는 전기 메커니즘 인 액추에이터에 적절한 명령을 전송합니다. 명령과 동시에 동일한 센서가 조작기의 움직임이 조작자의 움직임과 일치하는지 확인합니다. 동작 진폭의 동기화 외에도 엔지니어는 임시 통신 문제에 직면 해 있습니다. 사실 모든 기계공은 반응 시간이 있습니다. 따라서 외골격의 사용이 충분히 용이하다는 목표로 최소화해야합니다. 현재 강조되고있는 작고 조밀 한 외골격의 경우 인간과 기계 운동의 동기화가 특별한 우선 순위를 갖습니다. 조밀 한 외골격은지지 표면 등을 증가시키지 못하기 때문에, 사람과 움직일 시간이없는 역학은 사용에 악영향을 줄 수 있습니다. 예를 들어 기계식 "다리"의시기 적절하지 않은 움직임은 단순히 사람이 균형을 잃어 버리거나 떨어지는 사실로 이어질 수 있습니다. 그리고 이것이 모든 문제는 아닙니다. 분명히, 사람의 발은 손과 손가락은 말할 것도없고 팔보다 자유도가 적습니다.
최신 역사 군사 외골격은 2000 년에 시작되었습니다. 그런 다음 미국 기관 DARPA는 EHPA 프로그램 (인간 성능 향상을위한 외골격 - 인간 생산성 향상을위한 외골격)의 시작을 시작했습니다. EHPA 프로그램은 미래의 군인 이미지를 만드는 데 참여한 더 큰 Land Warrior 프로젝트의 일부였습니다. 그러나 2007에서는 Land Warrior가 취소되었지만 그 외골격 부분은 계속되었습니다. EHPA 프로젝트의 목표는 소위 말하는 것을 만드는 것이 었습니다. 완성 된 외골격은 사람의 손과 발을 구성하는 앰플리파이어를 가지고있었습니다. 동시에 무기 나 예약은 필요하지 않았습니다. DARPA와 펜타곤의 책임자들은 외골격 분야의 현 상황이 단순히 부가적인 기능을 갖추는 것을 허용하지 않는다는 것을 완전히 이해했다. 따라서 EHPA 프로그램의 기술적 임무는 약 100 킬로그램의 무게와 운동 속도를 증가시키는화물의 외골격에 군인이 장기간 운반 할 수 있음을 의미합니다.
Sacros와 University of Berkeley (미국) 및 일본 사이버 다인 시스템 (Cyberdyne Systems)은 신기술 개발에 참여하기를 희망했습니다. 프로그램이 시작된 이래로 12 년이 지났으며이 기간 동안 참가자 목록에 약간의 변화가있었습니다. 지금까지 Sacros는 Raytheon의 일원이되었으며 Berkeley Bionics라는 대학 부서는 Lockheed Martin의 한 부서가되었습니다. 어쨌든 이제는 EHPA 프로그램에 의해 생성 된 외골격의 3 가지 프로토 타입이 있습니다 : Lockheed Martin HULC, Cyberdyne HAL 및 Raytheon XOS.
이러한 외골격의 첫 번째 요소 인 HULC는 DARPA의 요구 사항을 완전히 충족하지 못합니다. 사실 25-kilogram 디자인에는 등받이 시스템과 기계식 "다리"만 있습니다. HULC의 손 지원은 구현되지 않았습니다. 동시에 HULC 운영자의 신체 기능은 등지지 시스템을 통해 손에 대한 대부분의 하중이 외골격의 힘 요소로 전달되어 궁극적으로지면에 도달 함으로 인해 향상됩니다. 적용된 시스템 덕분에 병사들은 최대 90 킬로그램의화물을 운반 할 수 있으며 동시에 모든 군 표준을 충족시키는 하중을 경험할 수 있습니다. HULC에는 8 시간 동안 작동 할 수있는 용량의 리튬 이온 배터리가 장착되어 있습니다. 절약 모드에서는 외골격에있는 사람이 시속 4-5 킬로미터의 속도로 걸을 수 있습니다. 가능한 최대 HULC 속도는 17-18 km / h이지만 시스템 작동 모드는 단일 배터리 충전의 작동 시간을 크게 줄입니다. 미래에는 록히드 마틴 (Lockheed Martin)이 HULC에 연료 전지를 장착 할 것을 약속합니다. 그 용량은 하루 동안 충분할 것입니다. 또한 향후 버전에서는 설계자가 손을 "로봇 화"할 것을 약속함으로써 사용자의 외골격 능력을 크게 향상시킬 것입니다.
회사 Raytheon은 현재 XOS-1 및 XOS-2 지수를 사용하여 유사한 외골격을 어느 정도 발표했습니다. 그것들은 무게와 크기의 매개 변수가 다르며 결과적으로 여러 가지 실질적인 특징이 있습니다. HULC와는 달리 XOS 제품군에는 손 하역 시스템이 장착되어 있습니다. 이 두 가지 외골격은 80-90 약 1 킬로그램의 자신의 체중에 필적하는 체중을 들어 올릴 수 있습니다. 두 XOS의 설계로 기계식 암에 다양한 매니퓰레이터를 설치할 수 있다는 점은 주목할만한 사실입니다. XOS-1과 XOS-2는 지금까지 상당한 전력 소비를 가지고 있음을 주목해야합니다. 이 때문에 그들은 아직 자율적이지 않고 외부의 힘이 필요합니다. 따라서, 스피치의 최대 이동 속도 및 배터리 수명은 아직 아니다. 그러나 Raytheon에 따르면 케이블을 통한 전력 공급의 필요성은 적절한 전기 공급원이있는 창고 또는 군 기지에서 XOS를 사용하는 데 장애가되지는 않습니다.

EHPA 프로그램의 세 번째 샘플은 Cyberdyne HAL입니다. 현재까지 실제 버전은 HAL-5입니다. 이 외골격은 처음 두 개가 어느 정도 혼합되어 있습니다. HULC처럼 자율적으로 사용할 수 있습니다. 2,5-3 시간 동안 배터리 수명이 충분합니다. XOS 제품군을 통해 Cyberdyne Systems는 디자인의 "충만 함"을 결합합니다. 이는 팔과 다리 모두를위한 지원 시스템을 포함합니다. 그러나 HAL-5의 운반 능력은 수십 킬로그램을 초과하지 않습니다. 마찬가지로,이 개발의 속도 특성과 상황. 사실 일본인 디자이너들은 군대에 집중하지 않고 장애인 재활에 집중했다. 분명히 이러한 사용자는 고속 또는 용량이 필요하지 않습니다. 따라서 현 상태의 HAL-5이 군대에 관심이 있다면 군대 사용을 위해 날카롭게 된 새로운 외골격을 기초로 할 수 있습니다.
EHPA 대회에 제출 된 유망한 외골격의 모든 변종 중 HULC만이 군대와 함께 시험에 도달했습니다. 다른 프로젝트의 많은 기능은 여전히 현장 시험을 시작할 수 없습니다. 9 월에는 실제 상황에서 외골격 작업의 특성을 연구하기 위해 여러 세트의 HULC가 부서로 보내집니다. 모든 것이 원활하게 진행되면 2014-15에서 대량 생산이 시작됩니다.
그 사이에, 과학자와 디자이너는 더 진보 된 개념 및 디자인이있을 것이다. 외골격 분야에서 가장 기대되는 혁신은 로봇 장갑입니다. 기존 매니퓰레이터는 도구 및 이와 유사한 도구를 사용하여 수동으로 사용하기에는 아직 그다지 편리하지 않습니다. 또한, 이러한 장갑의 생성은 많은 어려움과 관련되어있다. 일반적으로 이들은 다른 외골격 골재와 유사하지만이 경우 동기화 문제는 많은 수의 기계 요소, 인간의 손 움직임의 특징 등에 의해 악화됩니다. 외골격의 발전의 다음 단계는 신경 전자 인터페이스의 생성 일 것입니다. 이제 역학의 움직임은 센서 및 추적 드라이브에 의해 제어됩니다. 엔지니어와 과학자에게보다 편리한 것은 인간의 신경 자극을 제거하는 전극이있는 제어 시스템을 사용하는 것입니다. 무엇보다도 이러한 시스템은 메커니즘의 반응 시간을 줄여 결과적으로 전체 외골격의 효율성을 높입니다.
실제적인 적용에 관해서는, 지난 반세기 동안, 그것에 대한 견해는 거의 변하지 않았습니다. 유망한 시스템의 주요 사용자는 여전히 군대로 간주됩니다. 그들은 적재 및 하역, 탄약 준비 및 전투 상황에서 전투기의 기능을 향상시키기 위해 외골격을 사용할 수 있습니다. 외골격의 운반 능력은 군대뿐만 아니라 유용 할 것이다. 사람이 신체 기능을 크게 향상시킬 수있는 광범위한 기술 배포로 모든 물류 및화물의 모양을 바꿀 수 있습니다. 예를 들어, 지게차가없는 상태에서화물 반 트레일러를 적재하는 시간은 수십 퍼센트 감소 할 것이고, 이는 전체 운송 시스템의 효율성을 증가시킬 것입니다. 마지막으로, 신경 자극에 의해 제어되는 외골격은 장애인 opornikami가 전 생애를 다시 살 수 있도록 도와줍니다. 또한, 신경 전자 인터페이스에 높은 기대를 걸고 있습니다 : 척추 부상 등. 뇌의 상해 신호는 신체의 특정 부분에 도달하지 않을 수 있습니다. 손상된 신경 영역으로 그들을 가로 채고 외골격의 제어 시스템으로 보내면 더 이상 휠체어 나 침대에 갇히지 않게됩니다. 따라서 군대 개발은 군대의 삶을 향상시킬 수 있습니다. 지금 당장은 큰 계획을 세우는 동안 가을에 시작될 록히드 마틴 HULC 외골격의 파일럿 작동에 대해 기억해야합니다. 그 결과에 따르면 전체 산업의 잠재 고객과 잠재적 인 사용자의 관심을 판단 할 수 있습니다.
해당 사이트의 자료 :
http://darpa.mil/
http://davidszondy.com/
http://lockheedmartin.com/
http://raytheon.com/
http://cyberdyne.jp/
http://rosbalt.ru/
정보