참호 위의 드론 : 정찰 쿼드로 콥터 대응 및 최전선 조정

우크라이나에서 러시아의 특수군사작전(SVO)은 지난 반세기 동안 가장 큰 군사적 충돌이 되었고, 제XNUMX차 세계대전 이후 유럽 대륙에서 가장 큰 군사적 충돌이 되었다. 참가자조차도 동일하다고 말할 수 있습니다. 이제 미국, 캐나다, 영국이 나치 블록에 합류했습니다.
이 전쟁의 또 다른 특징은 최신 정찰, 통신 및 정보 처리 수단을 사용하는 것인데, 이전에는 그렇게 많이 사용된 적이 없었습니다. NWO가 결국에 온 적대 행위의 형식, 즉 장갑차로 강화 된 보병 유닛에 의해 적의 위치를 느리게 "갉아 먹는"포병 전쟁을 결정하는 것은 바로 그들입니다. 탱크 웨지와 "전격전".
정확하게 치면 무기 적의 영토 깊숙한 곳으로의 이동은 주로 위성 및 잠복 정보 데이터를 기반으로 하며, 그 다음에는 소형 무인 항공기(UAV)가 적 탐지, 지상 유닛 및 화기의 동작 조정과 같은 가장 중요한 작업을 수행합니다. ) 쿼드로콥터, 헥사콥터, 옥타콥터 등의 유형과 항공기 및 헬리콥터 체계. 이러한 UAV의 대부분은 상업용 소형 UAV 쿼드로콥터이므로 향후 이에 대해 이야기하겠습니다.

상업용 소형 UAV 쿼드로콥터는 NWO 기간 동안 가장 중요하고 효과적인 전술 정찰 수단 중 하나가 되었습니다.
번쩍이는 민간인의 중요성을 상기할 필요가 있다. 드론JMD 기간 동안 우리 군대가 사용했으며 논쟁으로 Lobaev Z 텔레그램 채널에 게시된 우크라이나 문서 중 하나에서 발췌한 내용을 인용합니다.
“러시아 돌격 부대의 강점은 UAV와의 조정과 운영자, 총기 및 공격기 간의 명확한 조정입니다. 무인 항공기의 탐지기 운영자는 소위 일하는 무선 액세스 영역에 있습니다. 배터리 교체와 함께 2 대의 자동차 "회전 목마". 그는 우리의 위치를 볼뿐만 아니라 그들에게 사격을 가하고 고정밀하고 지역적인 예술을합니다. 파업뿐만 아니라 러시아 연방의 일부가 우리 위치를 공격할 때 종종 근접 전투를 조정합니다. 거기에서 상대방은 종종 서로를 보지 않고 근처에 있습니다. 그리고 수류탄을 던질 위치에 대한 관찰자의 힌트, AGS 시스템, 언더 배럴 및 재래식 수류탄 발사기로 공격해도 항공 검사가 없을 때 우크라이나 부대에 기회가 남지 않습니다.
우리는 RF 군대의 UAV 그룹에 대응하기 위해 다음과 같은 조치를 제안합니다.
드론 운영자의 위치를 찾기 위해 에어로스코프를 광범위하게 사용합니다. 예술 장교의 상당 부분이 현대전 준비 수준이 낮기 때문에 적 (즉, 우리는 러시아인)입니다. 고위 경영진은 실제로 스페셜에 시간을 소비하지 않습니다. 전쟁 범죄자 V. E. Lobaev와 그의 공장에서 제공하는 것과 같은 펌웨어 및 하드웨어 유형 탐지 방지 시스템 (칭찬 해 주셔서 감사합니다. 항상 기쁩니다. - 참고 Lobaeva). 따라서 에어로스코프는 모든 것을 쉽게 캡처합니다. 적절한 수의 에어스코프를 사용할 수 있고 러시아인이 무선 드론을 운영하는 경우 대포가 엄호되기 전 XNUMX분 안에 대원의 작업 시간이 계산됩니다. 불. 그 후 운영자는 도망치거나 부상을 입거나 사망하여 유닛이 보이지 않고 신속하게 조정되지 않습니다. 박격포 승무원, 총기 및 저격수에 대한 주의 - UAV 운영자가 핵심 목표입니다!!! 자격을 갖춘 사람은 거의 없으며 각각의 손실은 민감합니다 !!! 새롭고 동일한 효율성을 배우려면 많은 시간과 노력이 필요합니다. 그리고 이 직책에 적합한 사람을 찾는 것도 쉽지 않습니다! 우리가 기억하는 것에 비추어 볼 때, 통신 중계기뿐만 아니라 탐지기의 파괴가 주요 우선 순위입니다!
우리는 RF 군대의 UAV 그룹에 대응하기 위해 다음과 같은 조치를 제안합니다.
드론 운영자의 위치를 찾기 위해 에어로스코프를 광범위하게 사용합니다. 예술 장교의 상당 부분이 현대전 준비 수준이 낮기 때문에 적 (즉, 우리는 러시아인)입니다. 고위 경영진은 실제로 스페셜에 시간을 소비하지 않습니다. 전쟁 범죄자 V. E. Lobaev와 그의 공장에서 제공하는 것과 같은 펌웨어 및 하드웨어 유형 탐지 방지 시스템 (칭찬 해 주셔서 감사합니다. 항상 기쁩니다. - 참고 Lobaeva). 따라서 에어로스코프는 모든 것을 쉽게 캡처합니다. 적절한 수의 에어스코프를 사용할 수 있고 러시아인이 무선 드론을 운영하는 경우 대포가 엄호되기 전 XNUMX분 안에 대원의 작업 시간이 계산됩니다. 불. 그 후 운영자는 도망치거나 부상을 입거나 사망하여 유닛이 보이지 않고 신속하게 조정되지 않습니다. 박격포 승무원, 총기 및 저격수에 대한 주의 - UAV 운영자가 핵심 목표입니다!!! 자격을 갖춘 사람은 거의 없으며 각각의 손실은 민감합니다 !!! 새롭고 동일한 효율성을 배우려면 많은 시간과 노력이 필요합니다. 그리고 이 직책에 적합한 사람을 찾는 것도 쉽지 않습니다! 우리가 기억하는 것에 비추어 볼 때, 통신 중계기뿐만 아니라 탐지기의 파괴가 주요 우선 순위입니다!
인터넷에는 적의 인력과 장비를 감지하고 발사되는 화재를 조정하고 소형 지뢰와 수류탄을 직접 떨어 뜨리는 UAV에서 가져온 수많은 비디오가 있습니다. 특수 장치.
소형 쿼드콥터 UAV가 최전선에 있는 우리 병사들에게 중대한 위협이라는 데는 의심의 여지가 없으며, 이는 그들의 파괴가 최우선 순위 중 하나라는 것을 의미합니다.
UAV 쿼드로콥터를 파괴하려면 다음을 제공해야 합니다.
- 전장에서 적 UAV 쿼드로콥터의 XNUMX차 탐지;
- 추가 검색, 호위 및 그를 향한 무기의 정확한 조준;
-하나 또는 다른 유형의 무기로 패배하십시오.
이러한 작업을 더 자세히 살펴 보겠습니다.
탐지
UAV 쿼드로콥터를 탐지하는 작업은 가장 어려운 작업 중 하나입니다. 이 드론은 크기가 작고 본체는 대부분 플라스틱으로 만들어졌습니다. 이 때문에 대공 미사일 시스템(SAM)의 레이더 스테이션(RLS)에 의해 제대로 구별되지 않습니다. 또한 레이더의 작동은 적의 전자정보(RTR) 수단에 의해 탐지되며, 이후 AGM-88 HARM 유형의 대레이더 미사일(PRR), HIMARS 다중 발사 로켓 시스템(MLRS) 유도 미사일 또는 다른 유도 또는 비유도 탄약이 날아갈 수 있습니다.
전기 모터의 작동은 배터리로 구동되고 실제로 열을 방출하지 않기 때문에 열 화상 카메라에서도 거의 보이지 않습니다. 물론 우리는 가솔린 엔진이 장착 된 농업용 UAV가 아니라 전기 쿼드 콥터에 대해서만 이야기하고 있습니다. 잔디 깎는 기계처럼 덜거덕거리고 크리스마스 트리처럼 적외선(IR) 범위에서 빛납니다.
또한 전기 UAV 쿼드로콥터는 실제로 소음을 내지 않습니다. 개인적인 경험으로 볼 때 300-500m 고도에서 매우 큰 소리로 지상에서 "윙윙 거리는"DJI Mavic Mini 드론은 거의 들리지 않습니다. 이것은 거의 절대적인 침묵 속에있는 숲에 있습니다. 같은 높이에서는 시각적으로 거의 보이지 않습니다. 있어야 한다는 것을 확실히 아는 경우에만 감지할 수 있습니다.
그렇다면 UAV 쿼드로콥터 탐지를 수행하는 방법은 무엇입니까?
RTR 수단이 처음부터 사용될 수 있고 사용되어야 한다고 가정할 수 있습니다. 사실 모든 UAV 쿼드로콥터에는 이 UAV를 제어하는 운영자와 영구적인 통신 채널이 있습니다. 이 채널은 900MHz ~ 5,8GHz 범위에 있습니다.
고급 기능이 있는 SDR(Software Defined Radio) 수신기 및 스펙트럼 분석기를 사용하여 UAV 송수신기의 방사선을 감지할 수 있습니다. 이 자료의 앞부분에서 이미 사용에 대해 이야기했습니다. Starlink 터미널 및 해당 운영자에 대한 사냥이 공개됨을 선언합니다.. 레이더 및 열화상 카메라와 비교할 때 이 장비는 비용이 몇 센트에 불과합니다. 단일 SDR 수신기 또는 스펙트럼 분석기의 도움을 받아 지향성 안테나와 함께 예를 들어 Angel 전보 채널의 Golden Hands에서 원하는 UAV에 대한 대략적인 방향을 결정할 수 있습니다. Arinst 스펙트럼 분석기를 사용하여 드론을 감지하는 것이 표시되었습니다. 신호 소스의 삼각 측량 기능이 있는 분산 시스템을 사용하면 이 작업을 더 빠르고 정확하게 수행할 수 있다고 가정할 수 있습니다.
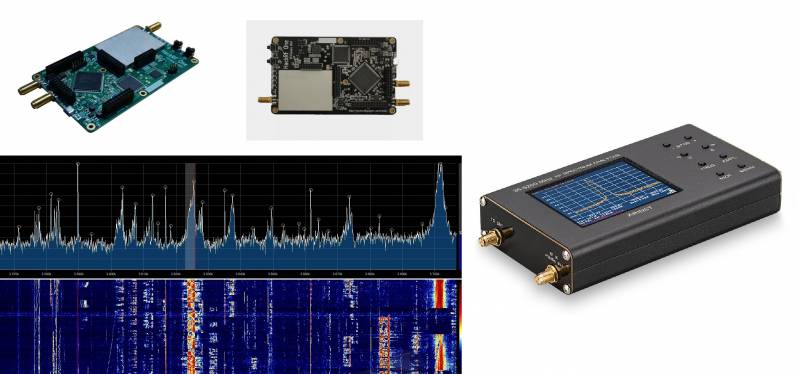
스캔 범위가 1MHz ~ 6GHz인 HackRF SDR 수신기(왼쪽)와 스캔 범위가 35MHz ~ 6,2GHz인 Arinst 스펙트럼 분석기(오른쪽)
적 UAV 쿼드로콥터의 기본 탐지를 위한 두 번째 가능한 방법은 음향입니다. 위에서 언급했듯이 DJI Mavic Mini 전기 UAV는 고도 300-500m에서 거의 들리지 않습니다. 즉, 이러한 UAV를 감지하려면 일부 음향 증폭 장치가 필요합니다. Rostec State Corporation의 기업은 정확한 특성을 알 수 없는 Attack-Shoroh 음향 정찰 모듈을 만들었습니다.

음향 정찰 모듈 "Ataka-Shorokh"
현재 군산복합체(MIC) 기업에서 일하고 있지 않은 민간 기업에서도 유사한 다른 시스템을 개발할 수 있습니다. 일부 기업은 특정 관심과 필요한 역량을 가지고 있지만 준비가 되어 있지 않습니다. 특정 고객 없이 이 방향으로 일하기 위하여 . 결국 최초의 방향탐지기는 제XNUMX차 세계대전 중에 만들어졌습니다.

XNUMX차(왼쪽) 및 XNUMX차(오른쪽) 세계 대전 당시의 사운드 픽업 방향 측정기
물론 현대적인 음향 정찰 수단은 XNUMX, XNUMX차 세계 대전만큼 커져서는 안 됩니다. 아마도 사운드 임계 값을 초과하는 컷오프가있는 최신 보청기를 기반으로 만들 수 있습니다.
UAV를 탐지하는 음향 수단에는 전방위 가시성 시스템과 적 UAV 쿼드로콥터의 방향을 보다 정확하게 결정하도록 설계된 시스템이 모두 포함될 수 있습니다. 가장 간단한 버전에서 UAV는 운영자가 귀로 감지할 수 있습니다. 보다 복잡한 시스템에서는 음향 신호를 분석을 위해 디지털 형식으로 변환할 수 있으며 간격 음향 수신기를 통해 적 UAV의 방향을 결정할 수 있습니다. 가장 유명한 UAV의 "음향 초상화"를 편집하여 유형을 결정할 수 있습니다.
확장된 기능을 갖춘 SDR 수신기 및 스펙트럼 분석기 및 음향 탐지 장비를 기반으로 제안된 전자 정찰 장비는 완전히 수동적인 시스템입니다. 항공.
호위
적 UAV 쿼드로콥터가 감지되고 대략적인 방향이 결정되면 정확한 위치에 대한 추가 검색을 수행하고 후속 패배를 위해 호위해야 합니다. 300~500미터 위에 위치한 UAV 쿼드로콥터를 시각적으로 감지하는 것은 극히 어렵기 때문에 일종의 조준 장치가 필요합니다.
주간에 UAV 쿼드로콥터를 탐지하려면 탐지 도구의 예비 목표 지정에 따라 광학 조준기로 충분할 수 있으며 시야의 배율과 너비는 경험적으로만 결정할 수 있습니다. 대안으로 렌즈 배율이 가변적이고 고해상도 디스플레이에 이미지를 표시하는 전문 비디오 카메라를 사용할 수 있습니다.
광학 시력 및 고해상도 주간 텔레비전 카메라와 관련하여 한 가지 문제가 있습니다. 도움을 받으면 황혼이나 밤에 쿼드로 콥터 UAV를 감지하는 것이 어렵고 오히려 불가능합니다.
제XNUMX차 세계 대전의 경험을 바탕으로 한 가장 간단한 해결책은 앞서 언급한 광학 조준경과 함께 가시 범위에서 능동 조명을 사용하는 것입니다. 가시 파장 범위의 광학 조명으로 LEP 램프(LED - LED 램프와 혼동하지 말 것)의 사용을 고려할 수 있습니다. 이러한 유형의 광원은 레이저를 사용하여 형광체의 작은 점을 레이저로 여기하여 좁은 장거리 빔을 얻을 수 있습니다. LEP 손전등의 빔에 의한 조명 범위는 몇 킬로미터에 도달합니다.

LEP 손전등 빔
또한 1,5nm의 파장에서 약 405W의 출력을 가진 소형 다이오드 레이저를 사용한 조명을 적용할 수 있습니다(사용 가능한 시장 솔루션). 그러한 파장을 가진 레이저는 많은 물질의 형광을 일으키며 높은 확률로 UAV 쿼드콥터의 흰색 부분이 먼 거리에서 매우 선명하게 보입니다(디스코에서 빛나는 흰색 티셔츠를 생각해 보십시오).
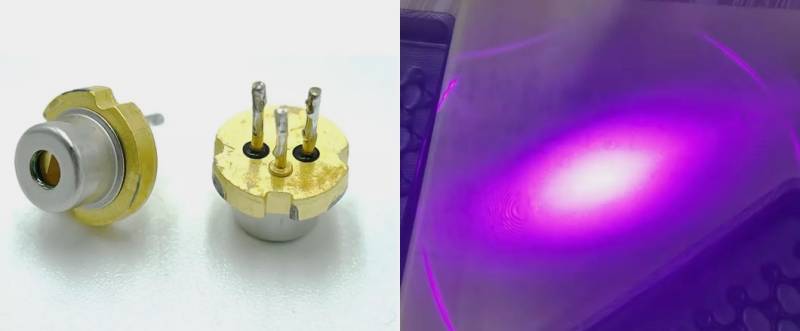
1nm 파장에서 출력이 405W 이상인 레이저 다이오드
또 다른 해결책은 야간 투시 장치/조준경(NVD)을 사용하는 것입니다. 열 화상 카메라가 아닙니다. UAV 쿼드로 콥터는 가시 광선의 증폭과 근거리 적외선 방사를 기반으로하는 야간 투시 장치 (이론적으로 열 화상 카메라에서 UAV 쿼드로 콥터를 관찰 한 개인적인 경험이 없습니다. 전기 UAV는 또한 열을 방출해야 합니다. 문제는 먼 거리에서 그것을 볼 수 있는 열화상 카메라가 매우 비싸다는 사실입니다.
차례로 야간 투시 장치는 광 증폭 원리를 기반으로하는 전자 광학 변환기 (IOC)를 기반으로 만들어진 아날로그 장치와 작동 가능한 고감도 매트릭스가 장착 된 디지털 장치로 나뉩니다. 근적외선 범위. 디지털 나이트 비전 장치/스코프에는 줌 렌즈가 있고 이미지를 표시할 수 있습니다.
수동 모드에서는 가장 현대적이고 희귀하며 값비싼 XNUMX세대 아날로그 야간 투시 장치만이 UAV 쿼드로콥터를 감지할 수 있다고 가정할 수 있습니다. 따라서 높은 확률로 예를 들어 동일한 레이저 다이오드를 기반으로 하는 IR 조명을 IR 스펙트럼에서만 사용해야 하며 이는 매우 광범위하고 방사능과 효율이 높습니다. 그리고 조명 없이는 할 수 없다면 값 비싼 아날로그 야간 투시 장치를 사용하는 것은 의미가 없습니다. 레이저 IR 조명과 결합 된 디지털 야간 투시 장치가 밤에 UAV 쿼드로 콥터의 추가 검색 및 추적 작업에 대처할 수 있습니다.

디지털 나이트 비전 스코프의 이미지
제안된 모든 조치는 개별적으로 또는 조합하여 사용할 수 있습니다. 예를 들어 밤에 적의 UAV를 파괴할 수 없는 경우 낮에 하늘을 치운 후 낮 시간에 재집결하고 부상자를 제거하고 보급품을 가져올 수 있습니다.
레이저 거리계로 추가 검색 및 추적 수단을 완성하는 것이 좋습니다. 비용이 매우 저렴하고 드론을 더 정확하게 물리칠 수 있습니다.
서비스에 배치된 UAV의 추가 검색 및 추적 수단 외에도 "두 번째 번호"에 자체 추가 검색 및 추적 도구 세트가 있는 경우 일종의 "스나이퍼 쌍"의 변형을 고려할 수 있습니다. 1/1,5 nm의 파장을 가진 520-525 W의 출력을 가진 레이저 다이오드를 기반으로 한 레이저 타겟 지정자로 보완됩니다. 이러한 레이저 지정자의 장점은 흐린 날씨의 낮에도 빔을 볼 수 있다는 것입니다. 즉, "두 번째 숫자"는 UAV의 방향을 "첫 번째 숫자"로 빠르고 효과적으로 나타낼 수 있습니다.

강력한 녹색 레이저를 사용하면 야간뿐만 아니라 흐린 날씨의 낮에도 UAV 쿼드콥터에 목표 지정을 지정할 수 있습니다(맑은 날씨에는 드론이 감지하기 더 쉬울 것입니다). 눈에 보이는 빔이 필요합니다. UAV에서 직접 포인트를 가리키고 유지하기가 어렵기 때문입니다.
물론 활성 이미 터 (LEP 손전등, IR 레이저, 파장 405nm, 특히 520/525nm의 레이저)를 사용하면 사수 / 관찰자의 위치를 가릴 수 있지만 멀리서 만 방향을 결정할 수 있습니다. 광원-특히 열 화상 카메라가있는 경우 적의 UAV 쿼드 콥터 근처에서 거리를 결정하는 것은 매우 어렵고 적의 전투기 감지를 보장합니다. 목표 지정에 따라 포병 공격을 조용히 기다리는 것보다 자신을 찾고 적의 UAV 쿼드 콥터를 신속하게 파괴하고 위치를 변경하는 것이 좋습니다.
패배
최전선에서 드론과의 싸움에 대해 이야기하고 있기 때문에 파괴 범위는 약 XNUMXkm로 제한됩니다. 휴대형과 휴대형의 두 가지 옵션을 고려할 수 있습니다. 따라서 첫 번째 변형에서는 파괴 무기의 질량, 치수 및 반동이 제한됩니다.
아마도 이전 장에서 논의한 UAV의 추가 검색 및 추적 수단이 장착 된 PKM 또는 Pecheneg와 같은 7,62x54R 구경 기관총은 화재 파괴 수단으로 작용할 수 있습니다. 기관총은 공중 표적에 대한 사용 편의성을 보장하는 휴대용 포탑에 장착해야 합니다. 약 XNUMXkm 거리에서 작은 목표물을 격파하는 것은 다소 어려운 작업이므로 기관총의 정확도와 정확도가 충분하지 않을 수 있습니다.

광학 조준경과 전술 소음기가 장착된 Pecheneg-SP 기관총
대안으로 Lobaev Arms의 구경 7,62x51mm "카운터"모델과 같은 고정밀 반자동 저격 소총의 사용을 고려할 수 있습니다. 소총도 포탑에 위치해야 합니다. 공중 표적을 파괴하기 위해 "카운터"에 짧은 폭발 (각각 2-3 발)의 발사 모드가 추가되어야 할 수 있습니다.

스나이퍼 라이플 "카운터"
분당 94 발의 발사 속도로 1800 발의 짧은 폭발로 발사 모드에서 소형 UAV에 대한 AN-5,45 돌격 소총의 효과를 테스트하는 것은 흥미로울 것입니다. 39x7,62mm 카트리지는 51x7,62mm 또는 54xXNUMXR 카트리지보다 훨씬 작습니다.
궁극적으로 최적의 무기 변형 선택은 실제 테스트 결과를 기반으로만 이루어질 수 있습니다.
별도로 탄약에 대해 말해야합니다. Airsoft는 때때로 자외선(UV) 조명을 사용하여 플레이어의 슈팅 정확도를 향상시키기 위해 날아가는 공에 형광을 발합니다. 아마도 7,62x51mm 및 7,62x54R 카트리지의 총알 바닥에도 형광 구성을 적용 할 수 있습니다. 앞서 언급한 405nm 레이저와 결합하여 사수(및 두 번째 승무원)는 효과적인 사격 조정을 위해 공격받는 UAV를 향해 날아가는 총알의 궤적을 시각적으로 관찰할 수 있습니다. 그러나 여기에는 카트리지 공장의 참여가 이미 필요하며 이는 분명히 쉽지 않을 것입니다. 소규모 기업에서 이러한 "안티 드론"카트리지를 소량으로 제조하는 것이 가능합니까?
휴대용 버전에서는 12,7x108mm용 중기관총 NSV, "Kord" 또는 23x2mm 탄약용 자동 총 ZU-23-158가 픽업이나 트럭 차체에 배치되어 파괴 수단으로 사용할 수 있습니다. 웨어러블 콤플렉스와 마찬가지로 실전 테스트 결과를 바탕으로 최적의 선택이 가능하다. 쿼드콥터 UAV는 작고 공격하기 어려운 목표물이며, 그것을 파괴하기 위한 무기는 높은 정확도와 발사 정확도를 가져야 합니다.
12,7x12,7mm용 YakB-108 7,62연장 기관총과 7,62x54R용 GShG-24와 같은 이국적인 무기도 고려할 수 있습니다. YakB 기관총은 Mi-29 수송 및 전투 헬리콥터의 일부 수정에 설치되며 GSHG 기관총은 위에서 언급한 YakB 기관총과 함께 Ka-XNUMX 헬리콥터의 현수식 곤돌라에 사용됩니다.

기관총 YakB-12,7(왼쪽) 및 GShG-7,62(오른쪽)
벨로루시 인들은 지상군을 지원하고 일부 보고서에 따르면 UAV를 파괴하도록 설계된 Berserk 로봇 시스템에 두 개의 GShG 기관총을 설치했습니다.

7,62개의 기관총 GShG-XNUMX가 장착된 벨로루시 로봇 단지 "Berserk"
대구경 및 고속 기관총을 발사하는 동안 조준하고 유지하려면 차체에 배치된 거대한 기관총이 필요합니다.
조사 결과
처음에 말했듯이 최전선에서 전술 정찰을 수행하고 포병 사격을 조정하고 전투기 위치에 수류탄 / 지뢰를 떨어 뜨리는 적 UAV와의 싸움은 우선 과제 중 하나입니다. 이 자료는 적 UAV의 기본 탐지, 추가 검색, 추적 및 파괴를 보장하는 수단에 대해 설명합니다.
본질적으로 제안된 솔루션은 공간 및 기능적으로 분산된 안티 드론 콤플렉스를 나타내며 각 구성 요소는 독립적으로 또는 조합하여 기능할 수 있으며 서로의 기능을 보완합니다.
포함할 수 있는 요소를 나열해 보겠습니다.
발각:
- SDR 수신기에 기반한 전자 지능 수단
- 스펙트럼 분석기에 기반한 전자 지능 수단
- 정찰의 음향 수단.
추가 검색 및 지원:
- 광학 조준기;
- 가변 배율 렌즈가 장착된 고해상도 주간 비디오 카메라
- LEP 조명;
- 파장이 405nm인 레이저, 출력이 1W 이상인 레이저
- 레이저 적외선 조명이 있는 디지털 야간 투시 장치
- 파장이 520/525nm인 녹색 레이저, 1W 이상의 전력(목표 지정).
패배(웨어러블 변형):
- 7,62x54R용 PKM 또는 Pecheneg 유형의 기관총;
- "카운터" 유형의 반자동 고정밀 소총, 구경 7,62x51mm, 2-3발의 짧은 발사로 발사 모드로 보완 가능.
패배(휴대용 옵션):
- 기관총 NSV 또는 "Kord"구경 12,7 mm;
- 자동 총 ZU-23-2;
- YakB 속사 기관총은 12,7x108 mm용으로, GSHG는 7,62x54R용으로 제작되었습니다.
컴플렉스의 위의 모든 요소를 작동하려면 다음이 필요합니다.
- 정찰 장비 운영자
- 화살표(첫 번째 숫자)
- 관찰자(두 번째 숫자).
전방 킬로미터당 정찰 자산, 저격수 및 관찰자의 수는 탐지 장비의 특성, 추가 검색 및 추적 드론, 선택한 적 드론 파괴 수단의 효율성에 따라 결정됩니다. 앞으로 우리는 이 자료에 제시된 것 외에도 적의 UAV를 무찌르는 다른 방법을 고려하려고 노력할 것입니다.
정보