Euronaval의 자치 해양 플랫폼

Catamaran Sterenn Du는 넓은 바다와 기상 조건에서 자율 수중 차량을 사용하도록 특별히 설계되었습니다.
무인 해양 시스템은 명확한 장점과 함께 UAV 및 지상 기반 무인 시스템과 종종 다른 문제에 직면합니다. 예를 들어, 장기간 순찰을 저속으로 수행 할 때 유인 우주선의 크기는 대부분 승무원 편의를 고려해야하며이 문제는 자동 표면 선박, USV (Unmanned Surface Vessel)에는 적용되지 않습니다.
반면에 유인 선박은 크기 때문에 항속 거리가 길고 탑재량이 많아 바다에 관심이 있는 사람은 아무도 없습니다. 드론 수백 톤의 무게. 이는 ANS를 사용하려면 모선(진수 및 수신 기술이 아직 개발 중임)이 필요하거나 해안 지역으로 제한하여 사용할 수 있음을 의미합니다.
그러므로 ANS와 자율 형 무인 수중 차량 (AUV)의 도입은 기본 기술을 적용 개념에 적용하는 것과 동시에 신기술을 다소 선택적으로 사용하는 문제 일 수 있습니다.


파리에서 열리는 Euronaval 전시회에서 2012이 끝난 10 월 말, 프랑스 회사는 세계 최초로 3 가지 신기술을 포함하는 독특한 시스템을 만들어 ANS와 ANPA 솔루션을 결합한 결과를 발표했습니다. 7 월 2009에서 프랑스 구매 기관인 DGA가 시작한 Espadon (swordfish) 프로젝트는 현재 로봇 공학, ECA 및 Thales 전문 회사 인 해군 DCNS 그룹의 팀에 의해 구현되고 있습니다.


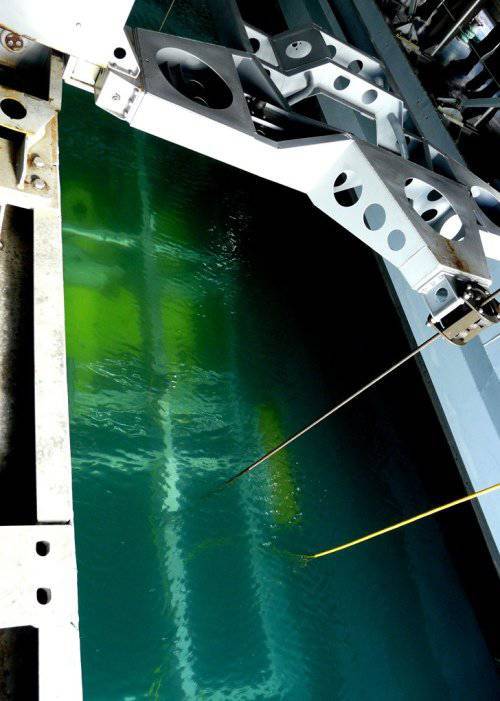
Espadon은 길이가 17 미터이고 무게는 25 톤이며 ANS 뗏목 인 Sterenn Du (브레 톤의 "블랙 스타")라는 이름입니다. 현재의 프랑스 법은 사람이 거주하지 않는 수상함의 사용을 금지하고 있기 때문에, Sterenn Du에는 운반기 객실과 같이 선박의 중심 축을 따라 설치되지 않은 소형 조종석이 있습니다. 그러나 Sterenn Du는 원격으로 제어되거나 완전히 독립적 일 수 있습니다.


Sterenn Du의 주요 임무는 AUV를 배치하는 것입니다. 2500-3000 톤의 변위와 함께 특별 모선 (Mothership)에 의해 전개 지역에 최대한 가깝게 전달 될 것이며, 이는 지뢰밭으로부터 안전한 거리를 유지하게 될 것입니다. Sterenn Du에는 3 개의 AUV가 있으며 ECA에서 개발했습니다. ECA는 광산 검색 및 파괴 장비를 갖추고 있습니다.


가장 큰 기술적 어려움은 자동 발사 및 수신 장치를위한 시스템을 설계하는 것이 었으며, Espadon의 ECA 프로젝트 매니저 인 Stephane Meltzheim은 Aviation Week에 말했다. 외계에서는 우주선보다 두 개의 우주선을 자동으로 도킹하는 것이 더 어렵습니다. 해류, 바람 및 파도가 있으며 DGA 조직은 선박이 5 지점의 파도로 바다에서 기능 할 수 있어야합니다. 전통적인 소해관은 파도로 3 점 이상을 사용할 수 없습니다.
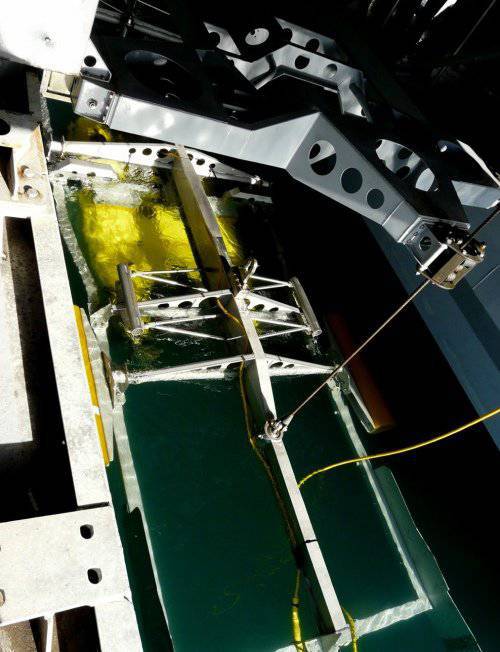

이 솔루션은 공중에서 연료를 보급하는 데 사용되는 호스와 유사합니다. 전 세계에서 처음으로 Sterenn Du는 ANS가 AUV를 포착하는 케이블을 푸는 솔루션을 적용한 다음 케이블로 AUV를 두 개의 뗏목 선 사이에있는 구획에 넣은 다음 다음 AUV를 가져옵니다. Meltzheim은이 특허 ECA 시스템에서 테스트에서 입증 된 성공이 100 %에 가깝다 고 자랑스럽게 덧붙입니다.

다음 혁신은 격실에 능동적이고 수동적 인 충격 흡수 시스템입니다. 이것은 AUV가 선박의 움직임에도 불구하고 가능한 한 안정적으로 유지된다는 것을 의미합니다. AUV가 컴 파트먼트에 있으면 Sterenn Du 내부로 전달됩니다.
세 개의 AUV 각각에 특정 역할이 할당됩니다. 첫 번째는 AUV DCL (탐지, 분류 및 지역화, 탐지, 분류 및 현지화)에 의해 실행됩니다. 길이가 5 미터이고 800-1000 kg에서 무게가 나가고 순항 범위가 25 마일이며 자치 탐색 시간은 설치된 배터리 유형에 따라 10에서 20 시간입니다. DCL에는 수중 물체를 탐지하고 분류하는 수중 음파 탐지기 (sonar)가 장착되어 있습니다. "이 장치는 독립적으로 작동하고 예상치 못한 문제를 극복 할 수있는 지능을 갖추고 있습니다."Meltzheim의 말입니다. 이 장치 자체는 2006-2009에서 개발되었지만 Espadon 프로그램에 자동 수신 시스템이 추가되었습니다.
AUV DCL에 의해 수집 된 데이터는 캐리어 선으로 다시 전송되며, 운영자는 어떤 물체를 더 면밀히 검사해야하는지 결정한 다음 두 번째 AUA를 프로그래밍하고 전송합니다. "이 프로젝트를 위해 특별히 설계된이 무인 뗏목은 활에 2 개의 프로펠러, 선미에 2 개의 프로펠러, 4 개의 비디오 카메라, 조명 장치 및 작은 수중 음파 탐지기가 장착 된 매우 기동성이 뛰어납니다."라고 Meltzheim은 설명합니다. DCL을 통해 사진과 비디오 촬영을 한 번에 하나씩 검토 한 후 적어도 한 번 이상 각 대상을 연구하고 임무를 마친 후 Sterenn Du로 돌아갑니다. "


이 단계에서 세 번째 AUV가 작동합니다. 최근까지 이 프로젝트는 전선으로 광산으로 안내되는 재사용 가능한 차량을 사용하여 광산 옆에 특수 폭발물을 방출하고 지뢰 파괴물이 폭발하기 전에 안전한 거리로 이동했습니다. "그러나 현재는 일회용품을 사용하는 경향이 있으며 훨씬 저렴합니다. 로봇운영자가 광산을 향해 카미카제를 지시했습니다."라고 Meltzheim은 말합니다.

다음 몇 달 동안 예정된 해상 시험이 완료되면 다음 단계는 2010 11 월의 Lancaster House 계약에 따라 프랑스와 영국이 공동으로 자금을 조달 할 두 번째 프로토 타입을 출시하는 것입니다.

Euronaval에 등장한 ANS의 또 다른 중요한 발전은 이스라엘의 Raphael 사에 의해 생산 된 ANS 수호자의 새롭고 큰 버전 인 작전 전술 개발에 부합하기 위해 새롭고 검증 된 기술의 사용을 반영합니다. 11 미터 선박 작업은 약 3 년 전에 시작되었습니다. 소형 보트의 성능을 평가 한 결과 개발자들은 48 시간까지 더 나은 속도와 자율을 제공 할뿐만 아니라 더 많은 흥분을 느끼며 일할 수있는 선박이 필요하다는 결론에 도달했습니다. 그리고 어떤 조건에서는 큰 부하가 걸립니다.

우선 순위는 제트 추진과 함께 이중 (100 % 중복) 디젤 엔진이 장착 된 더 길고 긴 하이킹을 위해 설계된보다 크고 비싼 ANS 시스템에서 떨어 졌으므로 운전자가 선박을 기지로 되돌리지 못하게하는 고장이 없음을 보장합니다. 이중화는 전기 및 제어 시스템에도 적용되며, 손상 및 생존 성 모니터링 시스템에 대한 새롭고 향상된 자체 진단 기능이 도입되었습니다.

새로운 선박은 개선 된 부력과 생존 성을 갖춘 무인 시스템과 함께 작동하도록 최적화 된 특허 디자인을 기반으로합니다. 밀폐형 벌크 헤드가있는 내구성이 강하고 내구성이 뛰어난 알루미늄 V 자형 선체는 내수성과 높은 바다에서의 높은 생존 성을 향상 시키도록 설계되었습니다. 두 사람의 팀이 센서를 제어하고 트레드를 탐색합니다. ANS에는 해상 감시 및 국경 순찰에 사용되는 다수의 시스템과 상호 작용할 수있는 레이더 및 광전자 센서와 통신 및 데이터 회선이 장착되어 있습니다.

선박의 시야는 돛대의 높이에 의해 제한됩니다. 수호자는 요격기입니다. 잠재적 인 위협을 탐지 한 후 Protector는 목표물을 가로 채서 안정화 된 Toplite 광학 전자 타워의 도움으로 식별합니다. 그런 다음 온보드 스피커폰 시스템을 사용하여 대상의 의도를 확인합니다. 치명적이지 않은 оружия 호스는 사용할 수 있지만 Protector에는 소형 태풍으로 안정화 된 기관총 시스템이 장착되어 있으며 장거리에서 대상을 정밀하게 파괴하기 위해 스파이크 미사일 전투 모듈을 장착 할 수 있습니다. 어느 정도 보호자는 전자전을위한 플랫폼으로 사용될 수 있습니다.

미국 해군은 광산 전쟁 수행 능력을 강화하기 위해 새로운 수호자의 ANS 강습에 관심이 있습니다. 함대는 광산 전쟁의 중요성을 과소 평가 한 것으로 비난 받아 지금은 잃어버린 시간을 만회하려고합니다. 그러나 해군은 언제든지 광산 감지 및 통관을 위해 넓은 지역을 신속하게 조사 할 수있는 선박을 원한다고 공통적 인 무인 표면 선 (공통 무인기)을 개발하는 AAI Advanced Systems의 Textron 사업 개발 이사 인 Stanley DeGues는 말했다. 무인 표면 용기, Cus-V).

Degués는 "배는 오직 밤에만 이것을 할 수 있습니다. 헬리콥터는 이것을 할 수 없습니다."

AAI는 Cus-V를 위해 해군 무인 영향 스위프 시스템 (UISS)은 음향 또는 자기 기폭 장치를 사용하여 원격, 긴 항법 및 반 자율 광산 스위핑 기능을 갖춘 해안 전함 (LCS)을 제공하도록 설계되었습니다. 미 해군은 2014 회계 연도에 UISS 플랫폼 테스트를 시작할 계획이며 2016 회계 연도에 서비스를 제공하기를 희망합니다.

Degués는 "지뢰 탐지기 하나의 가격으로 8-12 Cus-Vs를 구입할 수있게 될 것"이라고 말했다. Cus-Vs는 길이가 12 미터이며 초안은 0.6 미터보다 약간 더 크며 28 노드에서 최대 속도를 나타냅니다. 대략 1200 마일의 순항 범위를 가지고 있으며 2.5 노드의 속도로 10 톤까지 견인 할 수 있으며 4 미터 만 달릴 수 있으며 자치 식 발사, 견인 및 트롤 반환 시스템이 있습니다.
"Cus-V는 LCS 선박용으로 설계되었지만 C-17 및 C-5 항공기를 사용하는 항공기는 물론 민간 선박까지도 육로, 항공기로 운송 할 수 있습니다."라고 Degués는 말합니다. 해군의 다목적 수륙 양용 비행선 갑판에서 발사 될 수있다 "며 항구의 안전을 확보하는 등 세계적인 임무를 수행하고 있다고 강조했다.

ANPA 영역에서 해군 연구청 (Office of Naval Research, ONR)은 대형 무인 해저 차량 (LDUUV)에 대한 연구를 적극적으로 추진하고 있습니다.
현재 다양한 모양과 크기의 AUV가 운영 중이며 개발 중입니다. Littoral Battlespace Sensing Oceanographic Management에서 LCS 선박에 사용되는 Knifefish 소해 장치에 이르기까지 다양하지만 대부분 모두 좁은 용도의 장치입니다. LDUUV는 장거리 및 내비게이션 및 운영 속도, 자율성 및 운반 능력의 지속 기간을 가져 고급 영역에서 자율적이고 은밀한 운영을 허용 할 계획입니다.
미 해군은 특정 작업이 차량에 할당 될지 아직 구체적으로 밝히지 않았지만 해군 지휘관은 현재 3 월 2013에 의해 완료 될 예정인 대안 (대안 분석, AoA)을 분석 중이며 일부 가능성은 스스로를 설명합니다. 은폐와 장거리는 해저의 깊이를 매핑하는 것과 같은 미래의 작업의 운영 환경의 정찰, 관찰 및 정찰 또는 준비에 특히 유용 할 것입니다. 그러나 LDUUV가 광산이나 소형 어뢰를 운반 할 수있을뿐만 아니라 적의 잠수함을 추적하는 것과 같은 이전에 거주 한 잠수함에만 내재 된 작업을 수행 할 수있을 것이라고 상상하는 것은 어렵지 않습니다.

LDUUV는 또한 세계 경제 또는 적의 잠수함 대잠 잠수함 센서를 공격하는 데 매우 중요한 파이프 라인 및 통신 케이블 보호와 같은 긴급한 작업을 해결하는 데 적합합니다. 간단히 말해서, LDUUV는 정찰 및 전투 작전 준비 작업을 지속적으로 수행 할 것이지만, 현재의 무기고에서는 불가능한 과제를 수행하면서 미국 잠수함 함대의 기능을 확장 할 것입니다. 더욱이, 그들은 2020-s 기간 중 로스 앤젤레스 급 냉전 잠수함을 적어 놓는 효과를 완화하기 위해 제 시간에 도착할 것입니다.

새로운 차량은 자율 다목적 수중 시스템 (Mission Reconfigurable UUV, MR-UUV)과 같이 덜 불행한 전임자와 크게 다를 것입니다. 21-inch 어뢰 튜브의 한계에서 벗어나 에너지 저장 및 탑재량을위한 공간이 더 넓습니다. SSGN과 버지니아 잠수함은 대구경 어뢰 발사관, 연안 전함, 교각, 심지어는 전세 선박을 통해 다양한 플랫폼에서 사용할 수 있도록 설계되었습니다. MR-UUV의 개발과 함께, 에너지 축적 기술은 발전되어 에너지 밀도가 더 높고 항해가 길어질 수 있지만, 유용한 장치를 만들기 위해서는이 분야에서 많은 일들이 남아있다. 그리고 아마도 가장 중요한 것은 : 그들의 창조는 해군의 최고 수준의 명령에 의해 지원되었다는 것입니다. 2 월 조나단 그린 너 (Jonathan Greenert) 해군 작전 책임자 2012는 기자 회견에서 "나는 30-45와 같은 날 동안 운영 할 수있는 완성 된 대양 무인 유닛을보고 싶다"고 말했다.
2013 연도의 LDUUV 대안에 대한 분석을 마친 후 미 해군은 LCS 프로그램의 후원자의 성명서에 따라 2014 회계 연도에 제안서를 공식 요청할 가능성이 가장 높습니다. 동시에, Office of Naval Research는 에너지 밀도, 자율성 및 신뢰성을 향상시키는 기술에 중점을 둔 10 혁신적인 해양 프로토 타입을 생산할 계획입니다. 테스트를 마친 해군은 10 LDUUV 대원을 2020 해에 배치하기를 희망합니다.
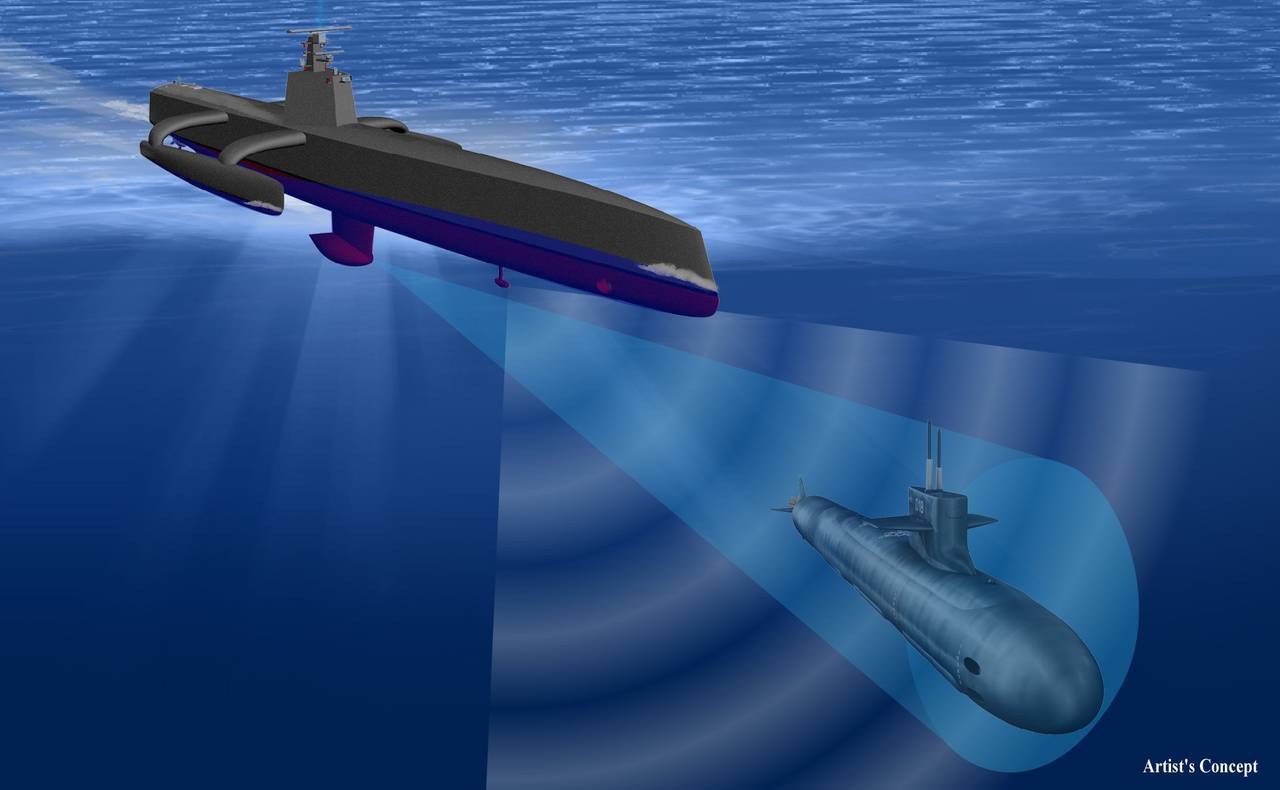
LDUUV보다 더 야심 찬 프로젝트는 순찰 중 잠수함으로 덮힐 고급 방위 연구 프로젝트 국 (DARPA)의 사막 선박 프로젝트입니다. Darpa는 최근 적의 잠수함을 탐지하고 추적하도록 설계된 무인 시스템의 작동 프로토 타입을 설계하고 구축하기 위해 Science Applications International을 선택했습니다 (대잠 전쟁 연속 무인 선박, ACTIV). 목표는 최소한의 인적 요소 참여로 수천 킬로미터에 걸쳐 수개월 동안 저잡음 디젤 - 전기 잠수함을 공개적으로 추적 할 수있는 비밀리에 자율적 인 선박을 시연하는 것입니다. 바다 재판은 중반 2015에 예정되어 있습니다.
ACTIV는 선박의 사막 개념을 최대한 효과적으로 구현하고 부력, 동적 안정성 및 방향과 같은 전함 요구 사항에서 벗어난 깨끗한 슬레이트에서 설계 한 것입니다. 자율성과 신뢰성 외에도 프로그램의 주요 목표는 목표 행동에 대한 응답으로 비 전통적인 전술의 가능성을 보장하기 위해 "추진력"을 달성하고 "과도한"속도, 항해 길이, 기동성 및 항해 기능을 입증하는 것입니다.
ACTIV는 잠수함을 탐지하지는 않지만 탐지 된 적의 잠수함을 추적 할 필요로부터 대잠 잠수함을 해제합니다. 폭풍우 동안 및 비 통신 기간 동안 수중 목표물을 포획하고 동반하기 위해 음향, 광전자, 레이더 및 라이더 센서를 사용하며 다른 해상 선박을 자율적으로 피하면서 국제 해상 기준을 충족시킵니다. 6200 km의 순항 범위와 80 일의 자율성을 갖춘 선박은 수평선 데이터 라인을 통해 해안에서 "주기적 원격 제어"를 받게됩니다.
그러나 Actuv와 LDUUV의 이러한 고급 프로젝트는 개발 단계에 있으며, 서비스를 시작하는 데는 몇 년이 걸릴 것입니다. 한편 유럽과 이스라엘은 진정한 자치 해양 체계를 창출하는 데 앞장서 왔습니다.
- Christina Mackenzie, David Eshel, Michael Fabey, Graham Warwick
- http://www.aviationweek.com/Article.aspx?id=/article-xml/AW_10_15_2012_p04-500687.xml&p=1
정보