뱀 로봇은 자신이 던져진 물체를 스스로 감싸도록 배웠습니다.
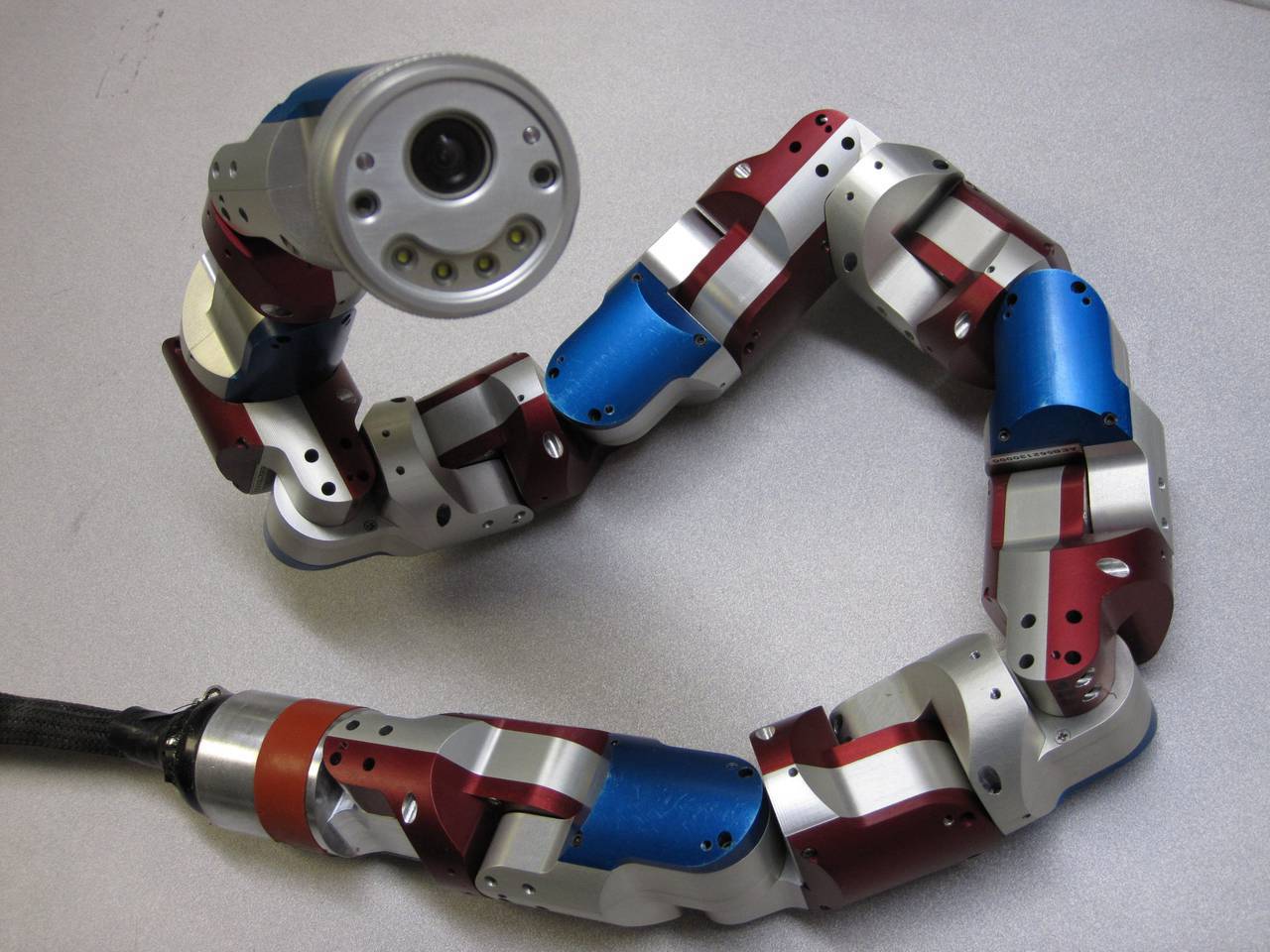
Carnegie Mellon University Biorobotics Laboratory의 연구원은 로보 뱀 중 하나를 채택하여 던져진 물건에 자동으로 감겨졌습니다. 뱀이 충돌하면 즉시 대상을 감싸며,이 실험에서는 3 개의 가지가있는 가벼운 기둥이됩니다.

로봇- 연은 실제 프로토타입의 동작을 모방하기 위해 지난 몇 년 동안 개발되었습니다. 과학자들은 다리와 발이 없는 그들의 이동 방식이 도달하기 어려운 장소, 예를 들어 지진으로 인해 무너진 건물에서 사용하기에 이상적일 수 있다고 믿습니다. 지금까지 연구원들은 실제 뱀처럼 움직일 수 있고 심지어 물체를 오를 수도 있는 로봇 뱀을 개발할 수 있었습니다. 그리고 이제 그들은 자신을 감싸고 던져진 물체를 붙잡는 능력으로 능력 세트를 확장했습니다.

과학자들은 몸에 내장 된 가속도계를 사용하여 로보 뱀에게이 능력을 부여했습니다. 그들은 물체와 접촉 할 때 순간에 갑작스런 멈춤을 감지 할 수 있습니다. 로봇은이 물체 주위에 포함 된 컬링 프로그램을 간단히 실행합니다. Carnegie Mallon University 팀은 의료 목적, 생산 요구, 고고학 목적을 위해 로보 뱀을 사용할 수있는 가능성에 대한 연구에 참여하고 있으며 아마도 가장 중요한 것은 수색 및 구조 작업을 돕는 것입니다.

랩핑과 목 졸림에는 중요한 차이가 있다는 점에 유의해야합니다. 로보 뱀은 정확하게 두 번째가 아니라 첫 번째 않습니다. 그것의 목적을 쥐어 짜지는 않지만 간단히 그 무게를 감싸기 위해 포장합니다. 그러나 프로젝트 스폰서가 미군 연구 실험실이기 때문에 특히 교살의 가능성이 뱀의 무기고에 쉽게 추가 될 수 있다고 제안하는 데 많은 노력을 기울이지 않습니다. 프로젝트 참여자는 군대 고객이 목표로하는 목표를 정확하게 공개하지 않으며 이에 관한 이론은 현재 완전히 투기 적입니다.

정보