군대의 자동화 된 제어 시스템 "Andromeda-D"
2003에서 러시아 공군 부대는 "Flight-K"라는 자동 명령 및 제어 시스템을 받았습니다. 그러나이 복합 단지에서 제어 프로세스의 자동화는 대대와 부분 연대 수준 (지휘관과 본부 통제 서브 시스템)에만 적용되었습니다.
76에서 공수 폭력 부 (프 스코프)가 수행 한 Polet-K의 성공적인 군사 작전 결과에 따르면, ACCS 시스템을 더 개발하기로 결정되었지만, 이번에는 공수 부대 통제의 모든 부대 공수 전투 차량과 별도의 군인. 이 문제의 해결책에 대한 실험적 설계는 "Andromeda-D"라는 이름을 받았다.
이 작업은 Polet-K 프레임 워크에서 채택 및 구현 된 시스템 엔지니어링 솔루션을 기반으로했습니다. 몇 년간의 부대 착취 관행이 보여지면서, 이러한 결정은 본질적으로 옳았다. 프로젝트의 일환으로, Polet-K 프레임 워크에서 이미 개발 된 하드웨어 및 소프트웨어로 생성되는 장치의 최대 통일 원칙이 적용되었으며, 생성 된 제어 도구의 모듈화 원리가 적용되었습니다.이 도구는 군사 계층의 모든 수준에서 제어 지점을 배치하기위한 것으로 전술적, 운영 관리.
따라서 프로젝트는 "별자리 (Constellation)"관심사에서 만들어진 복잡한 ESU TZ ( "M2 별자리"전술 부문에서 생성 된 것)보다 경제적 측면에서 상당히 비용이 적게 듭니다. ESU-TZ (팀 - 대대 - 회사 - 소대 - 부서 - 군대) 시스템에서 계획된 시스템 (공군 부대 - 부서 연대 - 대대 - 회사 - 소대 - 분리 - 군인)에 포함 된 비교적 많은 통제 수준에도 불구하고, 군인).
총계 : 8 ~ 6.
또한 Andromeda-D 개발 프로젝트는 Maneuver 자동화 명령 및 제어 시스템을 작성 및 운영하는 경험과 유사한 자동화 제어 시스템을 작성하는 데있어 국제 경험을 고려했습니다. 결과적으로, 전술적이 아닌 전술적 차원에서 통합 된 관리 시스템이 탄생했습니다!
2010에서는 복잡한 76 SDS와 2011에서 7 SDN (g) 및 98 공수 부대의 공수 부대에 명령을 내리기 시작했습니다.
첫 번째, Andromeda-D 시스템의 "설치"파티는 동일한 76 SDA에서 전투 훈련 활동 중에 운영되었습니다.
이 작업의 결과로 하드웨어와 소프트웨어 및 장비 세트의 구성이 크게 변경되고 개선되었습니다. 이 분야에서 근무하기 위해 공군 부대 사령부, 부서 및 연대 관계자는 1866 인치 모니터 및 내장 비디오 카메라가 장착 된 EC-17 PC를 기반으로 제작 된 새로운 자동화 된 작업장 (AWP)을 받았습니다.
인체 공학 또한 향상되었고 현장 제어 지점에 포함 된 장비의 전체 중량이 감소되었습니다. 상당한 처리가 시스템에서 사용되는 소프트웨어 제품을 거쳤습니다. 그리고이 모든 것은 2011 년 봄과 여름에 상당히 빠르게 이루어졌습니다.
그리고 마침내 8 월에서 9 월까지, 공중 부대 지휘관으로부터 분리와 군인에게 "힘의 수직"전체가 참여하여 단지 운영을 "시도"하는 것이 가능했습니다.
철분 ...
시스템의 모바일 제어 지점을 설치하는 기능은 상황의 상황에 따라 작전 (전투) 요원이 작업 구성 방법을 선택할 수있는 능력입니다.
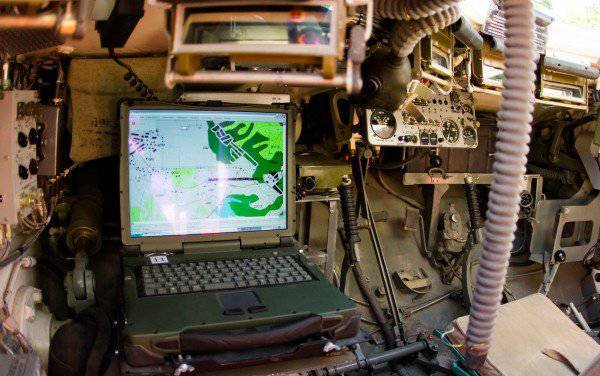
시스템의 각 공무원을위한 주요 관리 도구는 BMD-2 (BTR-D)에 기반한 지휘관 (명령 및 직원) 기계이며 자동화 된 작업장 (BTR-D에서 여러 장소에 있음)과 다양한 정보를 전송하는 통신 시설 채널.

분대장을 포함하여 분대장을 포함하여 각각의 장갑차에는 GLONASS 장비가 장착되어 있으며 장갑차의 위치를 결정할 수있는 이중 관성 좌표 측정 장비가 전장에서의 이동 방향과 속도를 읽고 "일회성"요청시이 데이터를 상위 지휘관에게 전달합니다. 이산 (지정된 간격으로 자동 모드)이 있습니다. 기계에서 얻은 좌표, 속도 및 이동 방향은 해당 데이터를 수신하도록 허가 된 공무원의 전자지도에 기호 (전술적 기호)의 형태로 표시 할 수 있습니다.

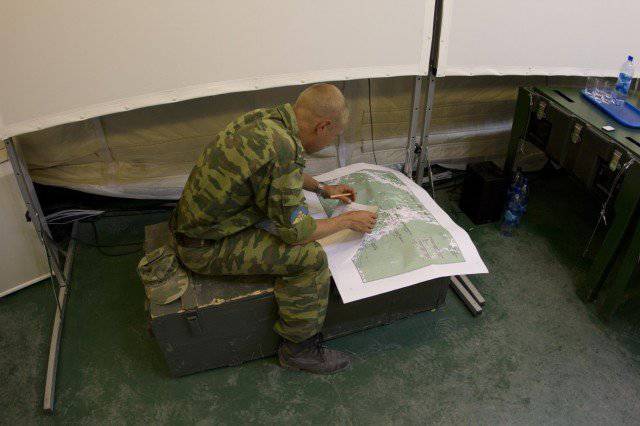
지휘관과 지휘관 이외에도 각 부서 및 연대 사령부 및 통제 센터 (PU)의 키트에는 집합 적 작업 (공기 프레임에 텐트)을 조직하기 위해 필요한 수의 모듈이 포함되어 있으며 상황에 따라 작전 (전투) 인원의 편안한 작업을 보장하는 데 필요한 모든 것을 갖추고 있습니다 화재의 파괴로 인한 적의 영향이 배제되거나 극히 희박한 경우.

텐트 내부에는 자율 조명, 냉난방 시스템, 공무원의 자동화 된 작업장 및 배치 용 접이식 플라스틱 가구가 배치됩니다. 텐트와 그 내부 장비는 공군의 계층 적 구조 인 "수직적"과 "수평 적"으로 통일되고 상호 교환이 가능합니다. 각 모듈은 20 워크 스테이션에 배포 할 수 있습니다.

각 텐트 (모듈)에는 무정전 전원 공급 장치, 스피커폰, 네 개의 멀티미디어 프로젝터 및 스크린, 24- 인치 플로터, 스캐너, 레이저 프린터로 로컬 네트워크 작동을 제공하는 시스템이 장착되어 있습니다. 각 모듈에는 자체 전원 공급 장치가 있습니다.

또한 각 모듈의 구조에는 외부 (내부) 검토 용 비디오 카메라가 포함되어있어 텐트 내부 및 PU 위치에 대한 접근 방식 모두에서 비디오 감시를 수행 할 수 있습니다.
각 제어 센터의 총 모듈 수는 다를 수 있으며 작업장의 해당 제어 센터의 필요에 따라 결정됩니다.
동시에 부서 관리 (연대)의 각 공무원 (DL)은 두 개의 개인용 컴퓨터 (AWP)를 가지고 있는데, 하나는 텐트에서 일하기위한 모듈의 일부이고, 다른 하나는 모바일 갑옷 기반에 설치됩니다 (지상에서 작업 할 때 원격 제거 가능성 또는 PU 모듈 내부에 구성된 로컬 네트워크에 대한 원격 연결).


따라서 상황에 따라 경영자는 다음과 같은 방식으로 작업 할 수 있습니다.
- 집합 적으로 (모든 우레탄 공무원은 모듈에있다.) 케이블 통신 채널을 사용하여 정보를 전송하는 경우).
- 분산 모드 (각 공식은 그의 "방어구"에 있고, 모듈 (장비가있는 텐트)는 펼쳐지지 않음). 라디오 채널은 정보를 전송하는 데 사용됩니다.
- 네트워크를 통해 모든 DL과 정보를 교환 할 수있는 결합 된 모드 (모듈 + 기갑 객체) (데이터 전송의 경우 케이블 및 라디오 채널 모두 사용됨).

1866-inch 스크린으로 보호되는 PC EC-17을 기반으로 만들어진 각 ARM 공무원은 화상 회의 모드에서 DL과 PU 간의 통신을 제공하는 내장형 웹 카메라 및 헤드셋을 포함합니다.
또한 지휘관의 AWP (수석 모듈)는 인터랙티브 화이트 보드에 연결되어 있으며 그래픽 편집기를 사용하지 않고 "손으로"전자 카드에 그래픽 정보를 빠르게 입력 할 수 있도록 적절한 소프트웨어 구성 요소가 있습니다.

전투 차량에 직접 설치된 것을 포함하여 작업장 (AWP)은 소프트웨어에서 분리 지휘관부터 공군 사령관에게 통일되며 해당 프로그램 및 데이터베이스 섹션에 대한 액세스 수준 만 다릅니다.
7 dshd를 사용한 훈련은 자동화 된 작업장이 갖추어 진 대대, 대대, 대대, 대대의 통제 지점과 함께이 운동의 명령 본부도 비슷한 시점에서 자동화 된 통제를했다는 사실에서 주목할 만했습니다. 이전 연습과 달리이 항목은 숙련 된 당국과 상당한 거리를두고 배치되었습니다. 그리고 그는 전투 임무의 완수, 입문의 전달 및 훈련생의 행동을 실질적으로 온라인으로 제어하면서 부서의 관리와 원격으로 일했습니다.

네트워크 라우팅 체계는 각 관리 직원이 중간 통신 노드에서 수많은 "수동"연결을 우회하여 모든 제어 개체 (소대 포함)까지 자동으로 "직접"접촉 할 수있는 기회를 제공했습니다. 예를 들어 공수 폭행 연대의 대포 지휘관에게 메시지를 보내려면 모든 워크 스테이션에서 동일한 전자 주소록에서 적절한 줄을 선택하면 충분했습니다.
이동할 수있는 분대 이외에, 앞으로 Andromeda-D 체계에는 부대의 매일 활동의 통제뿐만 아니라 각 단위 (대형)를 가진 관리 업무를 해결하는 고정 명령과 통제 지점 (공군 부대 지휘부, 사단, 연대의 명령 수준을 위해)가 포함될 것이다. 더 높은 정부 수준의 현장 통제 지점 배치.
예를 들어, 사단 지휘관은 부서의 연대와 함께 양측 지휘 및 직원 연대 전술 훈련을 수행합니다. 영구적 인 탈구 점 (RPM)과이 연대의 다각형은 서로 상당한 거리에 있습니다. RPM 연대와 분단에서 시스템의 고정 된 구성 요소가있는 상태에서 그는 본부에서 아무데도 줄이지 않고 훈련 된 지휘관의 결정을들을 수 있습니다. 비디오 컨퍼런싱은 연대 지휘관, 중개자 및 다른 공무원과의 "실시간"통신을 제공 할 것이며, 다음 스크린에서 학생들이 네트워크를 통해 전송 한 결정을 포함하여 전술 상황의 모든 요소를 그래픽으로 볼 수 있습니다.
컴플렉스의 일부 고정 요소는 이미 공군 사령부의 영구 배치 시점에 장착되었으며 운동 중 리더십 직원은 실질적으로 모든 자동화 된 작업장에서 공군 작전 담당관에게 연락 할 수있는 기회를 제공 받았습니다. 포함 - 화상 회의 사용
알고리즘
자동화 된 공정 제어 시스템의 하드웨어 - 소프트웨어 단지의 사용은 처음에는 공무원이 일정 수준의 이론 지식, 실용적인 기술 및 능력을 갖추고 있음을 의미합니다.

즉, 전자지도에서 전술 상황을 만족스럽게 표시하거나 종이지도 작업에 익숙하지 않은 사람이 작전 및 전술 계산을 수행하도록 가르치거나 그러한 계산을 수행하는 방법을 알지 못하는 경우를 예로들 수 있습니다.
또한 군사 지휘 본부의 일관성 수준, 본부의 각 군대 직원에 대한 지식 및 결정을 내리기위한 공동 작업에서의 본부 관리 및 지사 관리뿐만 아니라 전투 사명을 수령 한 지휘관과 직원의 명령과 조직이 상당히 중요합니다.
그리고 여기에 사용 된 통제 수단에 대한 통제 방법의 의존성의 법칙에 직접 따르는 또 다른 문제가 발생합니다.
가르침을위한 준비가 보여 주듯이 새로운 자동화 된 관리 도구를 사용하면서 구식 사령부와 본부의 알고리즘을 고안 한 "수동 방법"의 사용을 결합하려는 시도는 바람직한 시간에 이득을 얻지 못했을뿐만 아니라 유사한 관리를 해결하는 방법보다 종종 열등했다 순전히 "수동"작동 모드의 작업.

따라서 훈련 중뿐만 아니라 운동 자체도 모든 단계에서 지휘관과 직원의 작업의 특징은 전투 명령주기를 단축하는 데 최적 인 작업을 조직하는 방법을 찾는 것이 었습니다.
자동화 된 시스템 자체는 관리 작업을 해결하는 "촉진자"가 아니라는 것을 이해해야합니다. 어떤 경우에도, 그러한 시스템을 사용하거나 사용하지 않는 지휘관 및 스태프의 작업 알고리즘은 사람에 의해 결정됩니다.

그러나 운동 중에 얻은 경험, 시스템의 작동 (긍정적이든 부정적이든)에도 불구하고 전투 준비와 전투 임무 수행을위한 군 지휘 본부의 작업을위한 알고리즘의 개발은 여전히 지휘관과 부서 직원의 특권이다 .
일
공식의 관점에서, 시스템의 하드웨어 및 소프트웨어 시스템은 자동화 된 모드에서 8 가지 기본 관리 (정보) 태스크의 솔루션을 제공해야합니다.

운동의 결과에 따르면, 전투의 준비와 통제 중에 자동화 된 지휘 통제 시스템을 사용함으로써, 명시된 정보 작업의 성취를 실제보다 선언적으로 가속화 할 수 있다고 주장 할 수있다.
전반적으로 시스템에 관해 말하면 정보를 수집, 처리, 표시 및 교환하는 데있어 직원이 가장 힘들고 비생산적인 작업을 자동화한다는 사실을 언급 할 필요가 있습니다.

많은 운동 참가자는 다음과 같은 기능을 시스템에 구현했다고 언급했습니다.
- 다양한 워크 스테이션에서 지휘관의 그래픽 설정 파일에 대한 다중 사용자 액세스 구성
- 환경을 신속하게 확장하고 표시된 지형의 규모에 연결할 수있는 능력.
- 사용자가 데이터 손실없이 로컬 네트워크와의 연결이 끊어진 경우 오프라인으로 계속 작업 할 수 있도록합니다.
이것들은 장교가 비 창조적 인 작업을 수행하는 것을 면제하는 수단이며, 주로 상황의 그래픽 데이터를 복사하여 한 규모의지도에서 다른 곳으로 옮기는 것과 관련이있다.
수륙 양용 부대에서 사용할 수있는 화재 무기에 적용되는 "정찰 - 패배"주기를 줄이면 착용 할 수있는 복합 NPTK를 언급 할 가치가 있습니다.
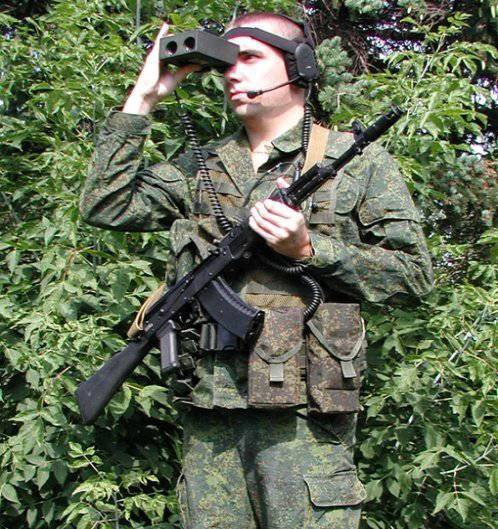
이 복합 단지에는 GLONASS 통신 수단, 통신 수단, 레이저 거리 측정기 및 보호 된 PC가 포함됩니다.


그러한 장비를 가지고있는 군인은 지능 시스템과 포병 통제 서브 시스템이 모두 사용하는 단일 데이터 형식으로 정확한 표적 지정을 자동으로 제공 할 수 있습니다. 또한이 데이터를 사령관에게 전송하여 표적 공격에 대한 결정을 내리는 동시에 포병 통제 하위 시스템으로 보내 사격의 초기 설정을 계산합니다.

또한, 그들이 말한대로, - 기술의 문제. 레오 스탯 포병 사격 통제 서브 시스템에 속하는 대상 데이터는 배터리, 소대 및 총에 대해 자동으로 계산되어 발사 초기 설정의 형태로 자동 제공됩니다. 해당 사령관으로부터 패배 명령을 받으면 배터리 (부서)가 지정된 대상에서 즉시 사격을 시작합니다.
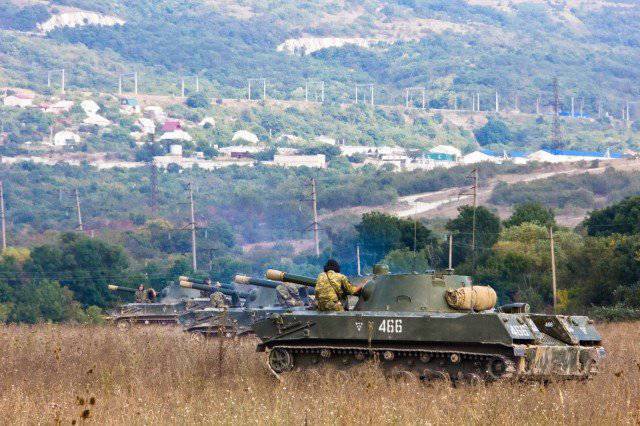
그런데 Raevskaya 테스트 사이트에서 Andromeda-D 시스템 번들 (Rheostat)을 사용하는이 목표 지정 방법은 처음에 실제 대상으로 선택한 대상의 패배와 함께 사용되었습니다. 정보의 자동 전송은 낙하산 대대의 정찰 소대에서 120-mm SAO Nona의 포병 부 총 계산에 이르기까지 "완전한 사슬"의 일부로 수행되었습니다.
현재 정찰 낙하산 대대와 공습 대대 정찰 소대 및 정찰 회사 소대에는 NPTK 단지가 갖추어져 있지만, 대대의 모든 낙하산 (소집 된 소대) 소대는 앞으로이 복합 단지와 함께 제공 될 것입니다.
앞으로 단일 형식의 목표 데이터를 사용하여 다양한 클래스의 무인 항공기를 사용하여 현재 수행중인 정찰 기능에 추가하고 대포 화재를 타겟팅하고 조정하는 기능도 추가 할 계획입니다.
착륙 후 수집하고 낙하산에 착륙 한 전투 차량 (물품)을 검색하는 것과 같은 특정 임무를 수행함에있어서 공중 부대 및 개인 군인들로부터 발생하는 정보의 필요성이 성취되는 것은 아무런 제한이 없었다.
Polet-K 시스템 구축 작업으로 돌아가서 SPAC (Paratrooper Control Unit)과 낙하산 수집 장치 (DDD)가 착용 할 수있는 복합체가 만들어졌으며, 승무원이 상륙 후 특히 시감도가 떨어지는 차량을 신속하게 검색 할 수있었습니다.

각 착륙 차량에는 트랜스미터가 설치되어 착륙시 낙하산 시스템이 작동 될 때 켜집니다.
복합체의 착용 할 수있는 부분을 가진 승무원은 전투 차량에서 신호를 수신합니다.이 신호는 소리와 시각적 형태 (차량 방향)로 낙하산 대원에게 전달되어 발급됩니다.
일하지 않았어.
그들은 공식 보고서에서 "진전이 이루어 졌음에도 불구하고 ..."라고 말하면서,
시스템에는 단점이 있습니다.
군대가없는 군 어디 있니?
사용자의 관점에서 보면 시스템의 주요 단점은 소프트웨어에 있습니다. 기본적으로 이것은 소프트웨어 인터페이스의 복잡성과 시스템의 소프트웨어 구성 요소가 없기 때문에 계산 및 분석 작업의 솔루션을 자동화 할 수 있습니다.
또한 기능이 매우 제한적인 시스템에서 GIS "통합"의 오래된 버전을 사용하기 때문에 다중 사용자 모드에서 상황 맵과 함께 작업 할 때 액세스 권한을 차별화하는 기능을 구현할 수 없으므로 이러한 모드를 사용하는 것은 매우 어렵고 안전하지 않습니다.
수용 가능한 시간 매개 변수에서 전술 징후를지도 상에 놓는 속도의 문제는 아직 해결되지 않고있다.
"통합"과 전자지도를 3 차원 형식으로 표시하지 않습니다. 또한 산악 지형의 볼륨 시각화는 제목에 '산'이라는 단어가있는 7 dsd의 특성을 기반으로하는 필수 작업입니다.
3,0 운영 체제에는 적절한 드라이버가 포함되어 있지 않기 때문에 자동화 된 작업장과 그래픽 정보를 표시하고 인식하기위한 최신 인쇄 도구와의 통합과 관련된 문제가 있습니다.
커맨더 인터랙티브 화이트 보드를 사용하는 가능성은 아직 완전히 실현되지 않았습니다. 그 이유는 WSWS의 오래된 운영 체제로 기능을 완전히 사용할 수 없기 때문입니다.
또한 사령관 및 본부 하위 시스템에 표시하기 위해 환경 데이터의 "제공자"인 모든 시스템의 단일 정보 공간에 통합 및 자동화를 완료하는 데 많은 작업이 필요합니다.

여기에는 정보, 공학 부대, 방사선, 화학 및 생물학적 보호, 전자전, 통신의 하위 시스템뿐만 아니라 물질 및 기술 지원 관리의 하위 시스템에서 얻을 수있는 수단으로 얻은 데이터도 포함됩니다.

지휘관이 정보에 입각 한 결정을 내리는 데 필요한 모든 상황 데이터를 수집하고 처리 할 때까지는 제어 시스템의 완전 자동화에 대해 이야기하는 것이시기 상조입니다.
예, 개발 단계에서 ACCS는 직원을지도를 "다시 그리는"일과에서 벗어나게합니다. 그러나 시스템을 더욱 개선하는 과정에서 먼저 다른 서브 시스템에서 본사로 오는 정보를 수집하고 처리 및 전송하는 마이닝 프로세스의 자동화에주의를 기울여야합니다.
이 경로의 주된 장애물은 개별 서브 시스템의 데이터 생성을위한 시스템 생성에 대한 작업을 이미 완료 한 개별 컴플렉스 생산자의 부서별 관심사입니다. 그래서 - 돈을 보냈다!
다음은 다양한 제조업체에서 사용하는이 데이터의 표시 방법 및 형식입니다. 각각 고유 한 데이터가 있습니다. 이것은 하위 시스템에서 사전 처리 된 데이터조차도 다른 처리 단계없이 지휘관과 직원의 하위 시스템에서인지되고 표시 될 수 없다는 사실을 초래합니다.
결과적으로이 데이터를 지휘관과 본부의 하위 시스템에 자동으로 전송할 수있는 능력이없는 개별 하위 시스템에서 데이터의 추출 및 처리를 자동화하려고 시도합니다 (궁극적으로 추출되었습니다!).이 작업을 절대적으로 무의미하게 만듭니다.
비 유적으로 말해서, 정보가 자유롭게 흐르는 용기처럼 용기에서 혈관으로 전달되는 대신에, 우리는 이제 매우 좁은 목을 가진 최고로 채워진 병에 몇 가지를 가지고 있습니다.
동시에 한 병에서 다른 병으로 액체를 수혈하려는 시도 (정보 교환)는 부당하게 시간 소모적 인 비생산적이고 비 창조적 인 작업이 필요하며 대개 지휘관과 직원 하부 조직의 임원이 수동으로 수행해야하는 매우 긴 과정입니다.
이러한 상황에 대한 조직적인 이유 중 하나는 군대에서 자동화 된 명령 및 통제 시스템을 창안하기위한 과학적 - 이론적 근거 (개념)가 부족하고 결과적으로 국방부의 발주 기관이 지정한 업무의 구체성, 사려 깊음 및 우선 순위가 낮다는 것이다. 그러나 이것은 다른 기사의 주제입니다.
시스템의 매우 심각한 단점은 작업을 위해 시스템을 준비하는 것과 관련하여 많은 양의 작업이 필요하다는 것입니다.
학습 준비 경험이 밝혀지면서 자동화 된 명령 및 제어 시스템의 작업을 조직하려면 통신 구성 및 통신 설비 및 하드웨어 - 소프트웨어 컴플렉스 설정 및 디버깅과 관련된 실용적인 조치를 수행하는 데 상당한 시간이 필요합니다. 또한 각 조정은 특정 전투 임무와 관련하여 수행됩니다. 전투 임무가 변경되거나 명령 및 통제 기관의 상태 (전투 효율성의 정도)가 변경되고 전투 명령의 요소에 의한 힘과 수단의 재분배가 이루어지면 구성 매개 변수를 변경하는 데 상당한 시간이 소요됩니다.
또한, 운동 과정에서 통신 수단의 특정 작동 모드를 유지하면서 상당한 노력이 필요한 경우 기존 채널의 상태를 모니터링하는 성능이 필요했습니다.
그러나이 문제를 해결할 수있는 방법이 있습니다. 이들은 소프트웨어 제어 라디오 방송국을 사용하는 자기 조직화 정보 전송 네트워크의 생성, 메쉬 기술 (진동 메쉬 기술 : 패킷 재전송 + 동적 라우팅)의 사용, 간섭 환경을 평가하기 위해 라디오에 내장 된 스펙트럼 분석기의 사용, 그리고 전술 네트워크 중계기 및 UT .d
이러한 단점 이외에 현장 작업에서의 시스템 작동 및 작동 결과에 기초한 운동 참여자는 개별 요소와 시스템을 모두 개선하고 정보의 처리 및 전송과 관련된 문제 및 인체 공학적 특성을 다루는 많은 제안을했습니다 시스템.
그러나 ...
Airborne Troops Command의 임원과 공수 전술 명령 및 통제 기관에 의한 Andromeda-D 자동화 된 지휘 통제 시스템의 사용 결과를 토대로 훈련 참가자들에 의해 언급 된 바와 같이, 많은 결론을 이끌어 낼 수있다.
전투 계획 및 통제 과정에서 자동화 된 명령 및 제어 시스템을 사용하면 비 자동화 된 제어 방법과 비교할 때 다음과 같은 많은 이점이 있음을 알 수 있습니다.
1. 정보 교환의 높은 효율성 (수집, 처리 및 정보 표시 (전술적 상황))을 달성하여 기본 관리 작업 (정보 작업)을 수행하는 속도를 여러 번 향상시킵니다.
2. "온라인"모드에서 상황을 지속적으로 수집하기 때문에 관리 시스템의 연속성이 보장됩니다.
3. 군인에서 공중 부대 지휘관에 이르기까지 통일 된 하드웨어 - 소프트웨어 콤플렉스, 모든 수준의 제어에 대한 균일 한 소프트웨어 (상황 데이터의 그래픽 표시 포함)를 사용하여 제어 시스템 요소의 높은 통일성이 달성되었습니다.
4. 일반적으로 통신 채널 (하드웨어 - 소프트웨어 콤플렉스 그룹)이나 제어 포인트의 상당 부분이 실패 할 경우 자동 프로세스 제어 시스템이 작업 용량을 신속하게 복구 할 수 있기 때문에 제어 시스템의 생존 가능성이 크게 높아졌습니다.
5. 지휘관과 본부가 분산 모드에서 일할 수있는 능력이 구현되어 관리 직원이 서로 상당한 거리를 유지하면서 효과적으로 기능을 수행 할 수있게하여 통제 및 통제 시스템 전체의 생존 가능성을 크게 높입니다.

결론 대신에.
훈련 기간에도 블라디미르 푸틴 총리가 노보로시 스크 (Novorossiysk)시를 방문 할 의사가 있음이 알려졌다. 더욱이 이번 방문의 날짜는 실제로 운동의 활동 단계의 기간과 일치했다.

부대장 중 한 명은 군대 출신의 유머와 함께 낙하산 보행자들에게 고유 한 유머를 지닌 사령관에게 "대통령이 훈련을 위해 우리에게 올 것인가, 아니면 바로 푸틴인가"라는 질문에 대해 운동 참가자들 사이에 끊임없는 소문이있었습니다. 군인 소문은 장교가 자신의 부하에게 대답했다는 침묵을 지니고 있지만 가능한 쇼를 위해 가장 유리한 장소에 배치 된 우레탄의 8 개 모듈 중 하나는 "대통령 텐트"라고 불렸다.


그러나 노보로시 스크에 머물렀던 당시 우리 사령관은 가르침으로 결코 그의 존재를 존중하지 않았습니다.
동시에 Night Wolves 모터 클럽이 조직 한 자전거 타는 축제가이 도시에서 개최되었는데, 우리 총리는 오토바이 클럽 지도자 인 자전거 타는 사람 Alexander Zaldostanov라는 회사의 외과 의사라는 별명을 가진 세발 자전거 Harley Davidson의 휠 뒤에 나타났습니다.

기자 회견장에 도착한 블라디미르 푸틴 (Vladimir Putin)은 무대로 올라가 참가자들과 손님들에게 연설을했다. "당신은 즐거운 시간을 보내고 오토바이를 타는 것은 아닙니다. 그 자체로 나쁘지는 않지만, 우리 국민, 우리나라가 필요로하는 위대한 애국적인 행사와 결합하십시오."
7 월 2004, 그의 법령에 따라, 푸틴 대통령은 "명령과 통제의 통일 된 시스템을 만들기위한 임무를 설정했다. 무기 무장 세력의 전술적 수준에서 "(ESU TZ).
그가 운동에 참석할 시간을 가졌다면 논리적이고 이해할 수있을 것입니다. 그의 법령에 따라 러시아 군대에서 처음으로 균일 한 데이터 전송 프로토콜을 사용하는 단일 하드웨어 및 소프트웨어에서 전술 링크가 부서에서 지휘관까지 모든 수준에서 조직되었습니다 사무실 포함. 그리고 노보로시 스크 (Novorossiysk)에서 불과 24 킬로미터 떨어진 곳에서 일어났습니다.
이것이 일어나지 않았다는 것은 유감입니다.
출처 :
http://dragon-first-ru.livejournal.com
http://vpk.name/library/andromeda-d.html
http://rosrep.ru/news/index.php?ELEMENT_ID=7041&SECTION_ID=17
76에서 공수 폭력 부 (프 스코프)가 수행 한 Polet-K의 성공적인 군사 작전 결과에 따르면, ACCS 시스템을 더 개발하기로 결정되었지만, 이번에는 공수 부대 통제의 모든 부대 공수 전투 차량과 별도의 군인. 이 문제의 해결책에 대한 실험적 설계는 "Andromeda-D"라는 이름을 받았다.
이 작업은 Polet-K 프레임 워크에서 채택 및 구현 된 시스템 엔지니어링 솔루션을 기반으로했습니다. 몇 년간의 부대 착취 관행이 보여지면서, 이러한 결정은 본질적으로 옳았다. 프로젝트의 일환으로, Polet-K 프레임 워크에서 이미 개발 된 하드웨어 및 소프트웨어로 생성되는 장치의 최대 통일 원칙이 적용되었으며, 생성 된 제어 도구의 모듈화 원리가 적용되었습니다.이 도구는 군사 계층의 모든 수준에서 제어 지점을 배치하기위한 것으로 전술적, 운영 관리.
따라서 프로젝트는 "별자리 (Constellation)"관심사에서 만들어진 복잡한 ESU TZ ( "M2 별자리"전술 부문에서 생성 된 것)보다 경제적 측면에서 상당히 비용이 적게 듭니다. ESU-TZ (팀 - 대대 - 회사 - 소대 - 부서 - 군대) 시스템에서 계획된 시스템 (공군 부대 - 부서 연대 - 대대 - 회사 - 소대 - 분리 - 군인)에 포함 된 비교적 많은 통제 수준에도 불구하고, 군인).
총계 : 8 ~ 6.
또한 Andromeda-D 개발 프로젝트는 Maneuver 자동화 명령 및 제어 시스템을 작성 및 운영하는 경험과 유사한 자동화 제어 시스템을 작성하는 데있어 국제 경험을 고려했습니다. 결과적으로, 전술적이 아닌 전술적 차원에서 통합 된 관리 시스템이 탄생했습니다!
2010에서는 복잡한 76 SDS와 2011에서 7 SDN (g) 및 98 공수 부대의 공수 부대에 명령을 내리기 시작했습니다.
첫 번째, Andromeda-D 시스템의 "설치"파티는 동일한 76 SDA에서 전투 훈련 활동 중에 운영되었습니다.
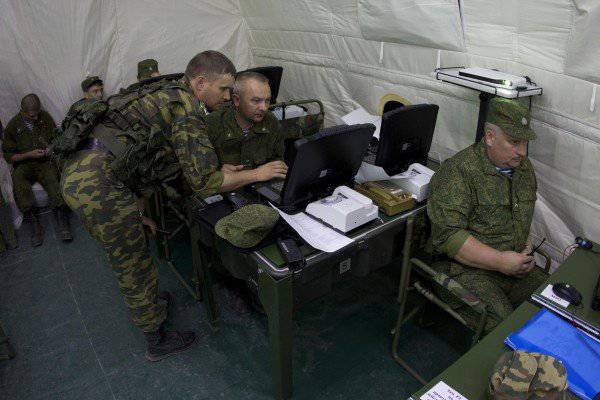
이 작업의 결과로 하드웨어와 소프트웨어 및 장비 세트의 구성이 크게 변경되고 개선되었습니다. 이 분야에서 근무하기 위해 공군 부대 사령부, 부서 및 연대 관계자는 1866 인치 모니터 및 내장 비디오 카메라가 장착 된 EC-17 PC를 기반으로 제작 된 새로운 자동화 된 작업장 (AWP)을 받았습니다.
인체 공학 또한 향상되었고 현장 제어 지점에 포함 된 장비의 전체 중량이 감소되었습니다. 상당한 처리가 시스템에서 사용되는 소프트웨어 제품을 거쳤습니다. 그리고이 모든 것은 2011 년 봄과 여름에 상당히 빠르게 이루어졌습니다.
그리고 마침내 8 월에서 9 월까지, 공중 부대 지휘관으로부터 분리와 군인에게 "힘의 수직"전체가 참여하여 단지 운영을 "시도"하는 것이 가능했습니다.
철분 ...
시스템의 모바일 제어 지점을 설치하는 기능은 상황의 상황에 따라 작전 (전투) 요원이 작업 구성 방법을 선택할 수있는 능력입니다.
시스템의 각 공무원을위한 주요 관리 도구는 BMD-2 (BTR-D)에 기반한 지휘관 (명령 및 직원) 기계이며 자동화 된 작업장 (BTR-D에서 여러 장소에 있음)과 다양한 정보를 전송하는 통신 시설 채널.
분대장을 포함하여 분대장을 포함하여 각각의 장갑차에는 GLONASS 장비가 장착되어 있으며 장갑차의 위치를 결정할 수있는 이중 관성 좌표 측정 장비가 전장에서의 이동 방향과 속도를 읽고 "일회성"요청시이 데이터를 상위 지휘관에게 전달합니다. 이산 (지정된 간격으로 자동 모드)이 있습니다. 기계에서 얻은 좌표, 속도 및 이동 방향은 해당 데이터를 수신하도록 허가 된 공무원의 전자지도에 기호 (전술적 기호)의 형태로 표시 할 수 있습니다.
지휘관과 지휘관 이외에도 각 부서 및 연대 사령부 및 통제 센터 (PU)의 키트에는 집합 적 작업 (공기 프레임에 텐트)을 조직하기 위해 필요한 수의 모듈이 포함되어 있으며 상황에 따라 작전 (전투) 인원의 편안한 작업을 보장하는 데 필요한 모든 것을 갖추고 있습니다 화재의 파괴로 인한 적의 영향이 배제되거나 극히 희박한 경우.
텐트 내부에는 자율 조명, 냉난방 시스템, 공무원의 자동화 된 작업장 및 배치 용 접이식 플라스틱 가구가 배치됩니다. 텐트와 그 내부 장비는 공군의 계층 적 구조 인 "수직적"과 "수평 적"으로 통일되고 상호 교환이 가능합니다. 각 모듈은 20 워크 스테이션에 배포 할 수 있습니다.
각 텐트 (모듈)에는 무정전 전원 공급 장치, 스피커폰, 네 개의 멀티미디어 프로젝터 및 스크린, 24- 인치 플로터, 스캐너, 레이저 프린터로 로컬 네트워크 작동을 제공하는 시스템이 장착되어 있습니다. 각 모듈에는 자체 전원 공급 장치가 있습니다.
또한 각 모듈의 구조에는 외부 (내부) 검토 용 비디오 카메라가 포함되어있어 텐트 내부 및 PU 위치에 대한 접근 방식 모두에서 비디오 감시를 수행 할 수 있습니다.
각 제어 센터의 총 모듈 수는 다를 수 있으며 작업장의 해당 제어 센터의 필요에 따라 결정됩니다.
동시에 부서 관리 (연대)의 각 공무원 (DL)은 두 개의 개인용 컴퓨터 (AWP)를 가지고 있는데, 하나는 텐트에서 일하기위한 모듈의 일부이고, 다른 하나는 모바일 갑옷 기반에 설치됩니다 (지상에서 작업 할 때 원격 제거 가능성 또는 PU 모듈 내부에 구성된 로컬 네트워크에 대한 원격 연결).
따라서 상황에 따라 경영자는 다음과 같은 방식으로 작업 할 수 있습니다.
- 집합 적으로 (모든 우레탄 공무원은 모듈에있다.) 케이블 통신 채널을 사용하여 정보를 전송하는 경우).
- 분산 모드 (각 공식은 그의 "방어구"에 있고, 모듈 (장비가있는 텐트)는 펼쳐지지 않음). 라디오 채널은 정보를 전송하는 데 사용됩니다.
- 네트워크를 통해 모든 DL과 정보를 교환 할 수있는 결합 된 모드 (모듈 + 기갑 객체) (데이터 전송의 경우 케이블 및 라디오 채널 모두 사용됨).
1866-inch 스크린으로 보호되는 PC EC-17을 기반으로 만들어진 각 ARM 공무원은 화상 회의 모드에서 DL과 PU 간의 통신을 제공하는 내장형 웹 카메라 및 헤드셋을 포함합니다.
또한 지휘관의 AWP (수석 모듈)는 인터랙티브 화이트 보드에 연결되어 있으며 그래픽 편집기를 사용하지 않고 "손으로"전자 카드에 그래픽 정보를 빠르게 입력 할 수 있도록 적절한 소프트웨어 구성 요소가 있습니다.
전투 차량에 직접 설치된 것을 포함하여 작업장 (AWP)은 소프트웨어에서 분리 지휘관부터 공군 사령관에게 통일되며 해당 프로그램 및 데이터베이스 섹션에 대한 액세스 수준 만 다릅니다.
7 dshd를 사용한 훈련은 자동화 된 작업장이 갖추어 진 대대, 대대, 대대, 대대의 통제 지점과 함께이 운동의 명령 본부도 비슷한 시점에서 자동화 된 통제를했다는 사실에서 주목할 만했습니다. 이전 연습과 달리이 항목은 숙련 된 당국과 상당한 거리를두고 배치되었습니다. 그리고 그는 전투 임무의 완수, 입문의 전달 및 훈련생의 행동을 실질적으로 온라인으로 제어하면서 부서의 관리와 원격으로 일했습니다.
네트워크 라우팅 체계는 각 관리 직원이 중간 통신 노드에서 수많은 "수동"연결을 우회하여 모든 제어 개체 (소대 포함)까지 자동으로 "직접"접촉 할 수있는 기회를 제공했습니다. 예를 들어 공수 폭행 연대의 대포 지휘관에게 메시지를 보내려면 모든 워크 스테이션에서 동일한 전자 주소록에서 적절한 줄을 선택하면 충분했습니다.
이동할 수있는 분대 이외에, 앞으로 Andromeda-D 체계에는 부대의 매일 활동의 통제뿐만 아니라 각 단위 (대형)를 가진 관리 업무를 해결하는 고정 명령과 통제 지점 (공군 부대 지휘부, 사단, 연대의 명령 수준을 위해)가 포함될 것이다. 더 높은 정부 수준의 현장 통제 지점 배치.
예를 들어, 사단 지휘관은 부서의 연대와 함께 양측 지휘 및 직원 연대 전술 훈련을 수행합니다. 영구적 인 탈구 점 (RPM)과이 연대의 다각형은 서로 상당한 거리에 있습니다. RPM 연대와 분단에서 시스템의 고정 된 구성 요소가있는 상태에서 그는 본부에서 아무데도 줄이지 않고 훈련 된 지휘관의 결정을들을 수 있습니다. 비디오 컨퍼런싱은 연대 지휘관, 중개자 및 다른 공무원과의 "실시간"통신을 제공 할 것이며, 다음 스크린에서 학생들이 네트워크를 통해 전송 한 결정을 포함하여 전술 상황의 모든 요소를 그래픽으로 볼 수 있습니다.
컴플렉스의 일부 고정 요소는 이미 공군 사령부의 영구 배치 시점에 장착되었으며 운동 중 리더십 직원은 실질적으로 모든 자동화 된 작업장에서 공군 작전 담당관에게 연락 할 수있는 기회를 제공 받았습니다. 포함 - 화상 회의 사용
알고리즘
자동화 된 공정 제어 시스템의 하드웨어 - 소프트웨어 단지의 사용은 처음에는 공무원이 일정 수준의 이론 지식, 실용적인 기술 및 능력을 갖추고 있음을 의미합니다.
즉, 전자지도에서 전술 상황을 만족스럽게 표시하거나 종이지도 작업에 익숙하지 않은 사람이 작전 및 전술 계산을 수행하도록 가르치거나 그러한 계산을 수행하는 방법을 알지 못하는 경우를 예로들 수 있습니다.
또한 군사 지휘 본부의 일관성 수준, 본부의 각 군대 직원에 대한 지식 및 결정을 내리기위한 공동 작업에서의 본부 관리 및 지사 관리뿐만 아니라 전투 사명을 수령 한 지휘관과 직원의 명령과 조직이 상당히 중요합니다.
그리고 여기에 사용 된 통제 수단에 대한 통제 방법의 의존성의 법칙에 직접 따르는 또 다른 문제가 발생합니다.
가르침을위한 준비가 보여 주듯이 새로운 자동화 된 관리 도구를 사용하면서 구식 사령부와 본부의 알고리즘을 고안 한 "수동 방법"의 사용을 결합하려는 시도는 바람직한 시간에 이득을 얻지 못했을뿐만 아니라 유사한 관리를 해결하는 방법보다 종종 열등했다 순전히 "수동"작동 모드의 작업.
따라서 훈련 중뿐만 아니라 운동 자체도 모든 단계에서 지휘관과 직원의 작업의 특징은 전투 명령주기를 단축하는 데 최적 인 작업을 조직하는 방법을 찾는 것이 었습니다.
자동화 된 시스템 자체는 관리 작업을 해결하는 "촉진자"가 아니라는 것을 이해해야합니다. 어떤 경우에도, 그러한 시스템을 사용하거나 사용하지 않는 지휘관 및 스태프의 작업 알고리즘은 사람에 의해 결정됩니다.
그러나 운동 중에 얻은 경험, 시스템의 작동 (긍정적이든 부정적이든)에도 불구하고 전투 준비와 전투 임무 수행을위한 군 지휘 본부의 작업을위한 알고리즘의 개발은 여전히 지휘관과 부서 직원의 특권이다 .
일
공식의 관점에서, 시스템의 하드웨어 및 소프트웨어 시스템은 자동화 된 모드에서 8 가지 기본 관리 (정보) 태스크의 솔루션을 제공해야합니다.
운동의 결과에 따르면, 전투의 준비와 통제 중에 자동화 된 지휘 통제 시스템을 사용함으로써, 명시된 정보 작업의 성취를 실제보다 선언적으로 가속화 할 수 있다고 주장 할 수있다.
전반적으로 시스템에 관해 말하면 정보를 수집, 처리, 표시 및 교환하는 데있어 직원이 가장 힘들고 비생산적인 작업을 자동화한다는 사실을 언급 할 필요가 있습니다.
많은 운동 참가자는 다음과 같은 기능을 시스템에 구현했다고 언급했습니다.
- 다양한 워크 스테이션에서 지휘관의 그래픽 설정 파일에 대한 다중 사용자 액세스 구성
- 환경을 신속하게 확장하고 표시된 지형의 규모에 연결할 수있는 능력.
- 사용자가 데이터 손실없이 로컬 네트워크와의 연결이 끊어진 경우 오프라인으로 계속 작업 할 수 있도록합니다.
이것들은 장교가 비 창조적 인 작업을 수행하는 것을 면제하는 수단이며, 주로 상황의 그래픽 데이터를 복사하여 한 규모의지도에서 다른 곳으로 옮기는 것과 관련이있다.
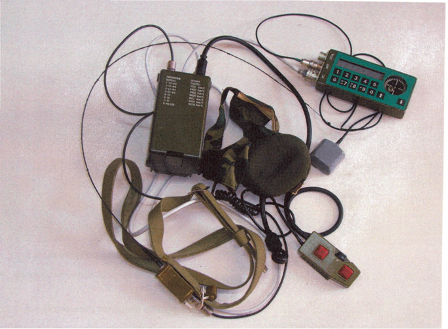
수륙 양용 부대에서 사용할 수있는 화재 무기에 적용되는 "정찰 - 패배"주기를 줄이면 착용 할 수있는 복합 NPTK를 언급 할 가치가 있습니다.
이 복합 단지에는 GLONASS 통신 수단, 통신 수단, 레이저 거리 측정기 및 보호 된 PC가 포함됩니다.
그러한 장비를 가지고있는 군인은 지능 시스템과 포병 통제 서브 시스템이 모두 사용하는 단일 데이터 형식으로 정확한 표적 지정을 자동으로 제공 할 수 있습니다. 또한이 데이터를 사령관에게 전송하여 표적 공격에 대한 결정을 내리는 동시에 포병 통제 하위 시스템으로 보내 사격의 초기 설정을 계산합니다.
또한, 그들이 말한대로, - 기술의 문제. 레오 스탯 포병 사격 통제 서브 시스템에 속하는 대상 데이터는 배터리, 소대 및 총에 대해 자동으로 계산되어 발사 초기 설정의 형태로 자동 제공됩니다. 해당 사령관으로부터 패배 명령을 받으면 배터리 (부서)가 지정된 대상에서 즉시 사격을 시작합니다.
그런데 Raevskaya 테스트 사이트에서 Andromeda-D 시스템 번들 (Rheostat)을 사용하는이 목표 지정 방법은 처음에 실제 대상으로 선택한 대상의 패배와 함께 사용되었습니다. 정보의 자동 전송은 낙하산 대대의 정찰 소대에서 120-mm SAO Nona의 포병 부 총 계산에 이르기까지 "완전한 사슬"의 일부로 수행되었습니다.
현재 정찰 낙하산 대대와 공습 대대 정찰 소대 및 정찰 회사 소대에는 NPTK 단지가 갖추어져 있지만, 대대의 모든 낙하산 (소집 된 소대) 소대는 앞으로이 복합 단지와 함께 제공 될 것입니다.
앞으로 단일 형식의 목표 데이터를 사용하여 다양한 클래스의 무인 항공기를 사용하여 현재 수행중인 정찰 기능에 추가하고 대포 화재를 타겟팅하고 조정하는 기능도 추가 할 계획입니다.
착륙 후 수집하고 낙하산에 착륙 한 전투 차량 (물품)을 검색하는 것과 같은 특정 임무를 수행함에있어서 공중 부대 및 개인 군인들로부터 발생하는 정보의 필요성이 성취되는 것은 아무런 제한이 없었다.
Polet-K 시스템 구축 작업으로 돌아가서 SPAC (Paratrooper Control Unit)과 낙하산 수집 장치 (DDD)가 착용 할 수있는 복합체가 만들어졌으며, 승무원이 상륙 후 특히 시감도가 떨어지는 차량을 신속하게 검색 할 수있었습니다.
각 착륙 차량에는 트랜스미터가 설치되어 착륙시 낙하산 시스템이 작동 될 때 켜집니다.
복합체의 착용 할 수있는 부분을 가진 승무원은 전투 차량에서 신호를 수신합니다.이 신호는 소리와 시각적 형태 (차량 방향)로 낙하산 대원에게 전달되어 발급됩니다.
일하지 않았어.
그들은 공식 보고서에서 "진전이 이루어 졌음에도 불구하고 ..."라고 말하면서,
시스템에는 단점이 있습니다.
군대가없는 군 어디 있니?
사용자의 관점에서 보면 시스템의 주요 단점은 소프트웨어에 있습니다. 기본적으로 이것은 소프트웨어 인터페이스의 복잡성과 시스템의 소프트웨어 구성 요소가 없기 때문에 계산 및 분석 작업의 솔루션을 자동화 할 수 있습니다.
또한 기능이 매우 제한적인 시스템에서 GIS "통합"의 오래된 버전을 사용하기 때문에 다중 사용자 모드에서 상황 맵과 함께 작업 할 때 액세스 권한을 차별화하는 기능을 구현할 수 없으므로 이러한 모드를 사용하는 것은 매우 어렵고 안전하지 않습니다.
수용 가능한 시간 매개 변수에서 전술 징후를지도 상에 놓는 속도의 문제는 아직 해결되지 않고있다.
"통합"과 전자지도를 3 차원 형식으로 표시하지 않습니다. 또한 산악 지형의 볼륨 시각화는 제목에 '산'이라는 단어가있는 7 dsd의 특성을 기반으로하는 필수 작업입니다.
3,0 운영 체제에는 적절한 드라이버가 포함되어 있지 않기 때문에 자동화 된 작업장과 그래픽 정보를 표시하고 인식하기위한 최신 인쇄 도구와의 통합과 관련된 문제가 있습니다.
커맨더 인터랙티브 화이트 보드를 사용하는 가능성은 아직 완전히 실현되지 않았습니다. 그 이유는 WSWS의 오래된 운영 체제로 기능을 완전히 사용할 수 없기 때문입니다.
또한 사령관 및 본부 하위 시스템에 표시하기 위해 환경 데이터의 "제공자"인 모든 시스템의 단일 정보 공간에 통합 및 자동화를 완료하는 데 많은 작업이 필요합니다.
여기에는 정보, 공학 부대, 방사선, 화학 및 생물학적 보호, 전자전, 통신의 하위 시스템뿐만 아니라 물질 및 기술 지원 관리의 하위 시스템에서 얻을 수있는 수단으로 얻은 데이터도 포함됩니다.
지휘관이 정보에 입각 한 결정을 내리는 데 필요한 모든 상황 데이터를 수집하고 처리 할 때까지는 제어 시스템의 완전 자동화에 대해 이야기하는 것이시기 상조입니다.
예, 개발 단계에서 ACCS는 직원을지도를 "다시 그리는"일과에서 벗어나게합니다. 그러나 시스템을 더욱 개선하는 과정에서 먼저 다른 서브 시스템에서 본사로 오는 정보를 수집하고 처리 및 전송하는 마이닝 프로세스의 자동화에주의를 기울여야합니다.
이 경로의 주된 장애물은 개별 서브 시스템의 데이터 생성을위한 시스템 생성에 대한 작업을 이미 완료 한 개별 컴플렉스 생산자의 부서별 관심사입니다. 그래서 - 돈을 보냈다!
다음은 다양한 제조업체에서 사용하는이 데이터의 표시 방법 및 형식입니다. 각각 고유 한 데이터가 있습니다. 이것은 하위 시스템에서 사전 처리 된 데이터조차도 다른 처리 단계없이 지휘관과 직원의 하위 시스템에서인지되고 표시 될 수 없다는 사실을 초래합니다.
결과적으로이 데이터를 지휘관과 본부의 하위 시스템에 자동으로 전송할 수있는 능력이없는 개별 하위 시스템에서 데이터의 추출 및 처리를 자동화하려고 시도합니다 (궁극적으로 추출되었습니다!).이 작업을 절대적으로 무의미하게 만듭니다.
비 유적으로 말해서, 정보가 자유롭게 흐르는 용기처럼 용기에서 혈관으로 전달되는 대신에, 우리는 이제 매우 좁은 목을 가진 최고로 채워진 병에 몇 가지를 가지고 있습니다.
동시에 한 병에서 다른 병으로 액체를 수혈하려는 시도 (정보 교환)는 부당하게 시간 소모적 인 비생산적이고 비 창조적 인 작업이 필요하며 대개 지휘관과 직원 하부 조직의 임원이 수동으로 수행해야하는 매우 긴 과정입니다.
이러한 상황에 대한 조직적인 이유 중 하나는 군대에서 자동화 된 명령 및 통제 시스템을 창안하기위한 과학적 - 이론적 근거 (개념)가 부족하고 결과적으로 국방부의 발주 기관이 지정한 업무의 구체성, 사려 깊음 및 우선 순위가 낮다는 것이다. 그러나 이것은 다른 기사의 주제입니다.
시스템의 매우 심각한 단점은 작업을 위해 시스템을 준비하는 것과 관련하여 많은 양의 작업이 필요하다는 것입니다.
학습 준비 경험이 밝혀지면서 자동화 된 명령 및 제어 시스템의 작업을 조직하려면 통신 구성 및 통신 설비 및 하드웨어 - 소프트웨어 컴플렉스 설정 및 디버깅과 관련된 실용적인 조치를 수행하는 데 상당한 시간이 필요합니다. 또한 각 조정은 특정 전투 임무와 관련하여 수행됩니다. 전투 임무가 변경되거나 명령 및 통제 기관의 상태 (전투 효율성의 정도)가 변경되고 전투 명령의 요소에 의한 힘과 수단의 재분배가 이루어지면 구성 매개 변수를 변경하는 데 상당한 시간이 소요됩니다.
또한, 운동 과정에서 통신 수단의 특정 작동 모드를 유지하면서 상당한 노력이 필요한 경우 기존 채널의 상태를 모니터링하는 성능이 필요했습니다.
그러나이 문제를 해결할 수있는 방법이 있습니다. 이들은 소프트웨어 제어 라디오 방송국을 사용하는 자기 조직화 정보 전송 네트워크의 생성, 메쉬 기술 (진동 메쉬 기술 : 패킷 재전송 + 동적 라우팅)의 사용, 간섭 환경을 평가하기 위해 라디오에 내장 된 스펙트럼 분석기의 사용, 그리고 전술 네트워크 중계기 및 UT .d
이러한 단점 이외에 현장 작업에서의 시스템 작동 및 작동 결과에 기초한 운동 참여자는 개별 요소와 시스템을 모두 개선하고 정보의 처리 및 전송과 관련된 문제 및 인체 공학적 특성을 다루는 많은 제안을했습니다 시스템.
그러나 ...
Airborne Troops Command의 임원과 공수 전술 명령 및 통제 기관에 의한 Andromeda-D 자동화 된 지휘 통제 시스템의 사용 결과를 토대로 훈련 참가자들에 의해 언급 된 바와 같이, 많은 결론을 이끌어 낼 수있다.
전투 계획 및 통제 과정에서 자동화 된 명령 및 제어 시스템을 사용하면 비 자동화 된 제어 방법과 비교할 때 다음과 같은 많은 이점이 있음을 알 수 있습니다.
1. 정보 교환의 높은 효율성 (수집, 처리 및 정보 표시 (전술적 상황))을 달성하여 기본 관리 작업 (정보 작업)을 수행하는 속도를 여러 번 향상시킵니다.
2. "온라인"모드에서 상황을 지속적으로 수집하기 때문에 관리 시스템의 연속성이 보장됩니다.
3. 군인에서 공중 부대 지휘관에 이르기까지 통일 된 하드웨어 - 소프트웨어 콤플렉스, 모든 수준의 제어에 대한 균일 한 소프트웨어 (상황 데이터의 그래픽 표시 포함)를 사용하여 제어 시스템 요소의 높은 통일성이 달성되었습니다.
4. 일반적으로 통신 채널 (하드웨어 - 소프트웨어 콤플렉스 그룹)이나 제어 포인트의 상당 부분이 실패 할 경우 자동 프로세스 제어 시스템이 작업 용량을 신속하게 복구 할 수 있기 때문에 제어 시스템의 생존 가능성이 크게 높아졌습니다.
5. 지휘관과 본부가 분산 모드에서 일할 수있는 능력이 구현되어 관리 직원이 서로 상당한 거리를 유지하면서 효과적으로 기능을 수행 할 수있게하여 통제 및 통제 시스템 전체의 생존 가능성을 크게 높입니다.
결론 대신에.
훈련 기간에도 블라디미르 푸틴 총리가 노보로시 스크 (Novorossiysk)시를 방문 할 의사가 있음이 알려졌다. 더욱이 이번 방문의 날짜는 실제로 운동의 활동 단계의 기간과 일치했다.
부대장 중 한 명은 군대 출신의 유머와 함께 낙하산 보행자들에게 고유 한 유머를 지닌 사령관에게 "대통령이 훈련을 위해 우리에게 올 것인가, 아니면 바로 푸틴인가"라는 질문에 대해 운동 참가자들 사이에 끊임없는 소문이있었습니다. 군인 소문은 장교가 자신의 부하에게 대답했다는 침묵을 지니고 있지만 가능한 쇼를 위해 가장 유리한 장소에 배치 된 우레탄의 8 개 모듈 중 하나는 "대통령 텐트"라고 불렸다.
그러나 노보로시 스크에 머물렀던 당시 우리 사령관은 가르침으로 결코 그의 존재를 존중하지 않았습니다.
동시에 Night Wolves 모터 클럽이 조직 한 자전거 타는 축제가이 도시에서 개최되었는데, 우리 총리는 오토바이 클럽 지도자 인 자전거 타는 사람 Alexander Zaldostanov라는 회사의 외과 의사라는 별명을 가진 세발 자전거 Harley Davidson의 휠 뒤에 나타났습니다.
기자 회견장에 도착한 블라디미르 푸틴 (Vladimir Putin)은 무대로 올라가 참가자들과 손님들에게 연설을했다. "당신은 즐거운 시간을 보내고 오토바이를 타는 것은 아닙니다. 그 자체로 나쁘지는 않지만, 우리 국민, 우리나라가 필요로하는 위대한 애국적인 행사와 결합하십시오."
7 월 2004, 그의 법령에 따라, 푸틴 대통령은 "명령과 통제의 통일 된 시스템을 만들기위한 임무를 설정했다. 무기 무장 세력의 전술적 수준에서 "(ESU TZ).
그가 운동에 참석할 시간을 가졌다면 논리적이고 이해할 수있을 것입니다. 그의 법령에 따라 러시아 군대에서 처음으로 균일 한 데이터 전송 프로토콜을 사용하는 단일 하드웨어 및 소프트웨어에서 전술 링크가 부서에서 지휘관까지 모든 수준에서 조직되었습니다 사무실 포함. 그리고 노보로시 스크 (Novorossiysk)에서 불과 24 킬로미터 떨어진 곳에서 일어났습니다.
이것이 일어나지 않았다는 것은 유감입니다.
출처 :
http://dragon-first-ru.livejournal.com
http://vpk.name/library/andromeda-d.html
http://rosrep.ru/news/index.php?ELEMENT_ID=7041&SECTION_ID=17
정보