탱크가 무서워?
극복하기 탱크 많은 보조 장치와 메커니즘이 fascinas (이전에는 브러시 뭉치 형태, 현재 파이프 형태)에서 탱크 장갑 포장재에 이르기까지 발명되고 구성되었습니다. 그러나 원칙적으로 적절한시기 에이 모든 것이 준비되어 있지 않습니다. 이상적으로, 탱크 자체는 외부의 도움없이 발생하는 장애물을 극복해야합니다.
꼬리가 달린 코뿔소
해자를 극복하는 문제는 특히 1920-1930-ies에서 군사 교리가 요새화 된 지역에 대한 공격을 제공했을 때 특히 적절했습니다. 그 당시의 고전적인 장애물은 폭이 2 m 이상이고 깊이가 1,2m 이상인 사다리꼴 도랑이었습니다. 탱크는 그 자체로 나올 수 없었습니다.
모든 국가에서 추적 차량의 개통성을 높이기 위해 연구 개발 활동이 활발히 이루어졌으며 엄청난 양의 독창적이고 환상적인 솔루션이 제공되었습니다. 전투 차량의 길이를 늘리지 않기 위해 일반 탱크의 선미에 대한 타협 옵션으로 장애물을 극복하면서 탱크가 움직 인 스틸 빔의 착탈식 "꼬리"가 부착되었습니다. 강철의 필요성이 없으면 승무원은 "꼬리"를 떨어 뜨릴 수 있었고 탱크는 원하는 기동의 자유를 받았습니다.
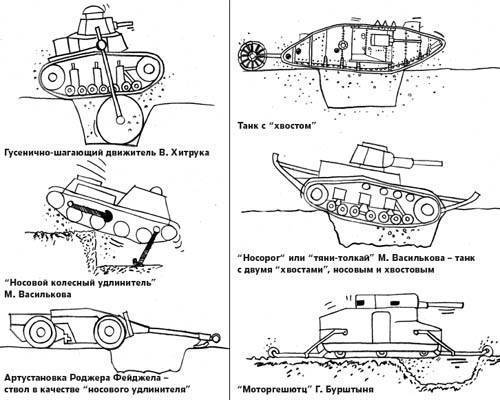
1929에서 디자이너 M. Vasilkov는 다른 탱크에서 가져온 T-18 앞에 두 번째 "꼬리"를 배치했습니다. 차는 "rhinoceros"또는 "push-pull"이라는 애칭을 받았다. 애 태성은 약간 개선되었지만 운전석의 리뷰는 쓸모 없게되었습니다.

Komkor S. Kokhansky는 또 다른 제안 인 M. Vasilkov를지지했습니다. "코 휠 연장"프로젝트 : 트레일 링 휠과 와이어 장벽으로 T-18에 고정 된 가이드 화살표와 크로스 컨트리 도랑 개량. 이 장치의 작동 원리는 휴대용 원통형 매스컴을 기반으로했습니다 (두 가지 옵션이 있습니다 : 나무와 부드러운 - 빨대로 채워진 캔버스 커버). 해자에 접근 할 때, fascina 바퀴는 바닥에 떨어지고, 탱크는 해자의 다른 쪽으로 원활하게 굴러 갈 것입니다. 이로 인해 3,5 미터까지의 도랑을 극복 할 수있었습니다.이 아이디어는 예기치 않게 적군 총무부에서 폭 넓은지지를 얻었습니다. 2 년 동안 특정 유형의 탱크에 "휠 익스텐션 (wheel extension)"을 설치하라는 요청이 반복되어 T-26 (CT-26 브랜드)에 장치가 장착되었습니다.

다리, 롤러, 코
뒤로 1911, 오스트리아 - 헝가리 철도 연대의 G. Burshtyn 중위는 원래의 레버 - 롤러 장치가있는 Motorgheshyutts 추적 장갑차 디자인을 개발했습니다. 탱크 앞뒤에 롤러가 달린 조절 레버로 인해 여러 가지 장애물을 쉽게 해결할 수있었습니다.
엔지니어 V. Khitruk는 추적 된 섀시에 보행기 설치를 제안했습니다. 이를 위해 섀시의 측면에는 탱크의 무게 중심에 가까운 수평축에 한 쌍의 레버가 연결됩니다. 꺼짐 위치에서는 가로로 배치됩니다. 자동차가 구덩이에 접근하여 충돌하면 레버가 뒤집어 장애물 바닥에 닿습니다. 결과적으로, 탱크는 문자 그대로 "해수욕장"의 반대편으로 이동하는 "손에"있습니다.
헝가리의 니콜라스 스트라 우슬러 (Nicholas Strausler)는 영국에서 1920-s의 끝에 "Strausler legs"로 알려진 비커스 탱크 용 장치를 개발했습니다. 스윙을하는 스프링 장착형 지지대는 탱크의 길이를 늘렸고 전쟁 기계가 폭 3 m 및 최대 1,5 깊이 미터까지 도랑 및 도랑 위로 올라갔습니다.
장애물을 극복하기위한 이국적인 방법 중 일부는 제안되었습니다. 예를 들어 도구의 배럴을 지지대로 사용하는 것입니다. 현대 탱크의 배럴 길이는 5-6 미터에 달하며 그 자체로이 긴 파이프를 어떻게 든 사용하는 아이디어가 나온다. 1977에서 발명가 인 Roger Fagel은 총구의 배럴을 그 반대쪽으로 기울여 도랑을 극복 할 수있는 바퀴 달린 자체 추진 포병 시스템을 특허했다. 이를 위해 장애물이 넘어 졌을 때 기계의 무게의 일부가 전달 된 배럴의 총구에 특별 지원 "발 뒤꿈치"가 수행되었습니다. 배럴을 낮추고 땅에서 "다섯 번째"자리를 지탱하는 장갑차는 지탱 부분의 길이를 거의 두 배로 늘리면 장애물의 다른 쪽으로 기어 갈 수 있습니다. 배럴은 기계의 "코 확장"역할을했습니다. 엔지니어링 솔루션, 나는 예상치 못했지만, 보통은 총기가 트렁크를 언급했다. оружия 더 조심스럽게 ...
메뚜기 탱크
그러나 하나는 하나에서 극복하고자하는 적의 장벽의 전체 스트립을 급습했다! 1930-x 국내 디자이너는 매우 혁신적인 아이디어를 개발했습니다. 계획에 따르면 탱크는 장애물을 극복해야합니다. 또한, 군사 이론가들은 미래의 세계 대전 (현재 제 2 차 세계 대전으로 알려짐)의 모든 탱크가 말 그대로 장애물 코스를 뛰어 넘을 것이라고 믿었습니다. 도랑, 돌고래, 용의 치아, 고슴도치, 광산 필드.
적군의 탱커들은 특별히 전투 기술을 연구했는데, 이는 안티 탱크 장애물을 뛰어 넘었습니다. 이 목적을 위해 적에 의해 세워진 편리한 지형 또는 카운터 스카프 또는 적 방어 구역 앞의 사퍼가 특별히 만든 발판이 사용되었습니다. 사실 전형적인 1920-1930-x 탱크는 약하고 무장력이면서 약간 장갑을 입은 가볍지 만 가볍고 빠른 차량 이었기 때문에 장애물이 너무 잘 날 수있었습니다.
또한, 1937에서는 장애물을 뛰어 넘는 특수 기계가 개발되었습니다. CCI-2 (장애물을 극복하기위한 탱크)의 기반으로 T-26 탱크의 더 가벼운 섀시가 사용되었습니다. 점프를 만들기위한 메커니즘은 러그 그립 (양쪽에 각각 2 개씩)과 점프 시간에 해제 한 특수 장치로 구성된 4 개의 편심으로 구성됩니다. 차가 장애물 앞에서 가속화되면서 올바른 순간에 돌아 다니는 괴짜들이 문자 그대로 탱크를 공중에 던졌습니다. 그러나 테스트 결과 기계의 속도가 점프를하기에는 충분하지 않으며 경직 된 서스펜션 시스템으로 인해 편심 기계의 정상적인 작동이 중단되었습니다.

장대 점프
흥미롭게도, 같은 기간 동안 전투 차량에 대한 완전히 주목할만한 부착이 개발되어 점프가 상당히 길어지고 비행 고도가 증가했습니다. 1940에서는 소비에트 엔지니어 인 M.M. Botvinnik은 운동 에너지를 사용하여 "점프를 구현하기 위해 탱크에 적용"에 대한 저작권 인증서를 받았습니다. 이를 위해 탱크에는 차량의 몸체에 수평축으로 부착 된 특수 회전식 U 자형 프레임이 제공되었습니다. 평소 위치에서 프레임이 뒤로 던져졌고 장애물 (붐)에 접근 할 때 특수 메커니즘이 앞으로 튀어 나와 분산 된 탱크가 프레임으로 프레임에 고정되었습니다. 장갑차는 동시에 반경이 프레임의 길이와 같은 원호를 따라 움직이기 시작했고 장대 점퍼처럼 장애물 위로 뛰어 올랐습니다.
프레임의 초점은 적의 장벽 자체뿐만 아니라 적의 방어선 앞에 특별히 배치 된 장애물로 작용할 수 있습니다. 도저 형 정지 장치가 프레임에있는 부드러운 토양의 경우 바닥으로 g아 먹습니다. 그러나 극복해야 할 장애물의 폭은 "극"의 길이와 같았으므로 기존의 탱크와 비교할 때 이점이 적었습니다. 점프의 길이를 늘리기 위해 발명자는 프레임에 강력한 스프링 쇽 업소버를 장착했습니다. 장애물에 프레임이 충돌하는 순간 스프링이 압축되어 특수한 마개로 압축 된 상태로 유지되어 적절한 순간에 스프링을 풉니 다. 봄이 열리자 봄은 탄도의 상단에 강력한 추가 충격을 전달했습니다.
그 결과, 전투 차량은 호를 따라가 아니라 포물선을 따라 움직였습니다. 즉, 수평선과 일정 각도를 이루는 몸체의 탄도 궤도를 따라 움직였습니다! 극복해야 할 장애물의 높이는 비행 경로를 길게하여 크게 증가되었습니다. 착륙 후, 탱크는 프레임을 떨어 뜨려 "빛"을 공격 할 수 있습니다. 불행히도, 발명 정보의 실용적인 응용 프로그램을 찾을 수 없습니다.
현대 탱크는 이전 탱크보다 훨씬 무겁습니다. 오늘날, 전투 차량의 무게는 60 T에 도달하므로 돌진 점프를 포기해야했습니다. 군사 전시회 및 미용실에서의 진정한 국내 탱크는 발판 (카운터 흉터)에서 눈부신 멋진 도약을하지만, 실제 전투 기술보다 건설적인 완벽 성과 군사 장비의 신뢰성을 입증 할 가능성이 큽니다.

가장 접근하기 쉽고 동시에 효과적인 대전차 무기는 오늘날에도 고전적인 고대 장애물 인 해자로 남아 있습니다. 심지어 오늘날에도 무서운 전투 차량에 심각한 장애물이됩니다.
꼬리가 달린 코뿔소
해자를 극복하는 문제는 특히 1920-1930-ies에서 군사 교리가 요새화 된 지역에 대한 공격을 제공했을 때 특히 적절했습니다. 그 당시의 고전적인 장애물은 폭이 2 m 이상이고 깊이가 1,2m 이상인 사다리꼴 도랑이었습니다. 탱크는 그 자체로 나올 수 없었습니다.
모든 국가에서 추적 차량의 개통성을 높이기 위해 연구 개발 활동이 활발히 이루어졌으며 엄청난 양의 독창적이고 환상적인 솔루션이 제공되었습니다. 전투 차량의 길이를 늘리지 않기 위해 일반 탱크의 선미에 대한 타협 옵션으로 장애물을 극복하면서 탱크가 움직 인 스틸 빔의 착탈식 "꼬리"가 부착되었습니다. 강철의 필요성이 없으면 승무원은 "꼬리"를 떨어 뜨릴 수 있었고 탱크는 원하는 기동의 자유를 받았습니다.
1929에서 디자이너 M. Vasilkov는 다른 탱크에서 가져온 T-18 앞에 두 번째 "꼬리"를 배치했습니다. 차는 "rhinoceros"또는 "push-pull"이라는 애칭을 받았다. 애 태성은 약간 개선되었지만 운전석의 리뷰는 쓸모 없게되었습니다.
소련의 디자이너들은 1930에서 혁명적 인 아이디어를 개발했습니다. 계획에 따르면 탱크는 도랑, 돌고래, 고슴도치, 지뢰밭과 같은 강력한 대전차 방어선을 극복하고 장애물을 뛰어 넘어야했습니다.
Komkor S. Kokhansky는 또 다른 제안 인 M. Vasilkov를지지했습니다. "코 휠 연장"프로젝트 : 트레일 링 휠과 와이어 장벽으로 T-18에 고정 된 가이드 화살표와 크로스 컨트리 도랑 개량. 이 장치의 작동 원리는 휴대용 원통형 매스컴을 기반으로했습니다 (두 가지 옵션이 있습니다 : 나무와 부드러운 - 빨대로 채워진 캔버스 커버). 해자에 접근 할 때, fascina 바퀴는 바닥에 떨어지고, 탱크는 해자의 다른 쪽으로 원활하게 굴러 갈 것입니다. 이로 인해 3,5 미터까지의 도랑을 극복 할 수있었습니다.이 아이디어는 예기치 않게 적군 총무부에서 폭 넓은지지를 얻었습니다. 2 년 동안 특정 유형의 탱크에 "휠 익스텐션 (wheel extension)"을 설치하라는 요청이 반복되어 T-26 (CT-26 브랜드)에 장치가 장착되었습니다.
다리, 롤러, 코
뒤로 1911, 오스트리아 - 헝가리 철도 연대의 G. Burshtyn 중위는 원래의 레버 - 롤러 장치가있는 Motorgheshyutts 추적 장갑차 디자인을 개발했습니다. 탱크 앞뒤에 롤러가 달린 조절 레버로 인해 여러 가지 장애물을 쉽게 해결할 수있었습니다.
엔지니어 V. Khitruk는 추적 된 섀시에 보행기 설치를 제안했습니다. 이를 위해 섀시의 측면에는 탱크의 무게 중심에 가까운 수평축에 한 쌍의 레버가 연결됩니다. 꺼짐 위치에서는 가로로 배치됩니다. 자동차가 구덩이에 접근하여 충돌하면 레버가 뒤집어 장애물 바닥에 닿습니다. 결과적으로, 탱크는 문자 그대로 "해수욕장"의 반대편으로 이동하는 "손에"있습니다.
헝가리의 니콜라스 스트라 우슬러 (Nicholas Strausler)는 영국에서 1920-s의 끝에 "Strausler legs"로 알려진 비커스 탱크 용 장치를 개발했습니다. 스윙을하는 스프링 장착형 지지대는 탱크의 길이를 늘렸고 전쟁 기계가 폭 3 m 및 최대 1,5 깊이 미터까지 도랑 및 도랑 위로 올라갔습니다.
장애물을 극복하기위한 이국적인 방법 중 일부는 제안되었습니다. 예를 들어 도구의 배럴을 지지대로 사용하는 것입니다. 현대 탱크의 배럴 길이는 5-6 미터에 달하며 그 자체로이 긴 파이프를 어떻게 든 사용하는 아이디어가 나온다. 1977에서 발명가 인 Roger Fagel은 총구의 배럴을 그 반대쪽으로 기울여 도랑을 극복 할 수있는 바퀴 달린 자체 추진 포병 시스템을 특허했다. 이를 위해 장애물이 넘어 졌을 때 기계의 무게의 일부가 전달 된 배럴의 총구에 특별 지원 "발 뒤꿈치"가 수행되었습니다. 배럴을 낮추고 땅에서 "다섯 번째"자리를 지탱하는 장갑차는 지탱 부분의 길이를 거의 두 배로 늘리면 장애물의 다른 쪽으로 기어 갈 수 있습니다. 배럴은 기계의 "코 확장"역할을했습니다. 엔지니어링 솔루션, 나는 예상치 못했지만, 보통은 총기가 트렁크를 언급했다. оружия 더 조심스럽게 ...
탱크를 개선하는 다양한 장치.
메뚜기 탱크
그러나 하나는 하나에서 극복하고자하는 적의 장벽의 전체 스트립을 급습했다! 1930-x 국내 디자이너는 매우 혁신적인 아이디어를 개발했습니다. 계획에 따르면 탱크는 장애물을 극복해야합니다. 또한, 군사 이론가들은 미래의 세계 대전 (현재 제 2 차 세계 대전으로 알려짐)의 모든 탱크가 말 그대로 장애물 코스를 뛰어 넘을 것이라고 믿었습니다. 도랑, 돌고래, 용의 치아, 고슴도치, 광산 필드.
적군의 탱커들은 특별히 전투 기술을 연구했는데, 이는 안티 탱크 장애물을 뛰어 넘었습니다. 이 목적을 위해 적에 의해 세워진 편리한 지형 또는 카운터 스카프 또는 적 방어 구역 앞의 사퍼가 특별히 만든 발판이 사용되었습니다. 사실 전형적인 1920-1930-x 탱크는 약하고 무장력이면서 약간 장갑을 입은 가볍지 만 가볍고 빠른 차량 이었기 때문에 장애물이 너무 잘 날 수있었습니다.
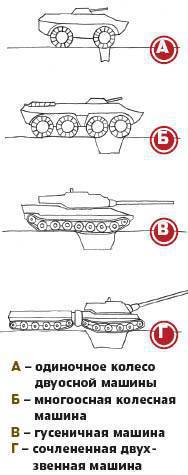
다른 섀시에있는 대전차 도랑 싸움 차량을 극복합니다.
또한, 1937에서는 장애물을 뛰어 넘는 특수 기계가 개발되었습니다. CCI-2 (장애물을 극복하기위한 탱크)의 기반으로 T-26 탱크의 더 가벼운 섀시가 사용되었습니다. 점프를 만들기위한 메커니즘은 러그 그립 (양쪽에 각각 2 개씩)과 점프 시간에 해제 한 특수 장치로 구성된 4 개의 편심으로 구성됩니다. 차가 장애물 앞에서 가속화되면서 올바른 순간에 돌아 다니는 괴짜들이 문자 그대로 탱크를 공중에 던졌습니다. 그러나 테스트 결과 기계의 속도가 점프를하기에는 충분하지 않으며 경직 된 서스펜션 시스템으로 인해 편심 기계의 정상적인 작동이 중단되었습니다.
이것은 현대 탱크조차도 훈련없이 반항을 극복하려고 시도 할 때 일어나는 일입니다.
장대 점프
흥미롭게도, 같은 기간 동안 전투 차량에 대한 완전히 주목할만한 부착이 개발되어 점프가 상당히 길어지고 비행 고도가 증가했습니다. 1940에서는 소비에트 엔지니어 인 M.M. Botvinnik은 운동 에너지를 사용하여 "점프를 구현하기 위해 탱크에 적용"에 대한 저작권 인증서를 받았습니다. 이를 위해 탱크에는 차량의 몸체에 수평축으로 부착 된 특수 회전식 U 자형 프레임이 제공되었습니다. 평소 위치에서 프레임이 뒤로 던져졌고 장애물 (붐)에 접근 할 때 특수 메커니즘이 앞으로 튀어 나와 분산 된 탱크가 프레임으로 프레임에 고정되었습니다. 장갑차는 동시에 반경이 프레임의 길이와 같은 원호를 따라 움직이기 시작했고 장대 점퍼처럼 장애물 위로 뛰어 올랐습니다.
프레임의 초점은 적의 장벽 자체뿐만 아니라 적의 방어선 앞에 특별히 배치 된 장애물로 작용할 수 있습니다. 도저 형 정지 장치가 프레임에있는 부드러운 토양의 경우 바닥으로 g아 먹습니다. 그러나 극복해야 할 장애물의 폭은 "극"의 길이와 같았으므로 기존의 탱크와 비교할 때 이점이 적었습니다. 점프의 길이를 늘리기 위해 발명자는 프레임에 강력한 스프링 쇽 업소버를 장착했습니다. 장애물에 프레임이 충돌하는 순간 스프링이 압축되어 특수한 마개로 압축 된 상태로 유지되어 적절한 순간에 스프링을 풉니 다. 봄이 열리자 봄은 탄도의 상단에 강력한 추가 충격을 전달했습니다.
사이드 편심을 지닌 소비에트 CCI-2. 점프의 시간에, 특별한 장치가 편심을 풀어 줬다. 그리고 그들은 탱크를 공중에 던지면서 뒤돌아 다녔다.
그 결과, 전투 차량은 호를 따라가 아니라 포물선을 따라 움직였습니다. 즉, 수평선과 일정 각도를 이루는 몸체의 탄도 궤도를 따라 움직였습니다! 극복해야 할 장애물의 높이는 비행 경로를 길게하여 크게 증가되었습니다. 착륙 후, 탱크는 프레임을 떨어 뜨려 "빛"을 공격 할 수 있습니다. 불행히도, 발명 정보의 실용적인 응용 프로그램을 찾을 수 없습니다.
현대 탱크는 이전 탱크보다 훨씬 무겁습니다. 오늘날, 전투 차량의 무게는 60 T에 도달하므로 돌진 점프를 포기해야했습니다. 군사 전시회 및 미용실에서의 진정한 국내 탱크는 발판 (카운터 흉터)에서 눈부신 멋진 도약을하지만, 실제 전투 기술보다 건설적인 완벽 성과 군사 장비의 신뢰성을 입증 할 가능성이 큽니다.
장치 MM을 사용한 위상 점프 탱크 Botvinnik.
정보