장거리 무인 정찰기 RQ-4 Global Hawk

UAV RQ-4 Global Hawk 프로그램은 5 월 1995에서 시작되었으며, Teledyne Ryan Aeronautical (TRA) 프로젝트가 Tier II + 프로그램에서 최고의 UAV 대회에서 우승자로 발표되었습니다. 경쟁은 6 개월 지속되었으며, 5 개 회사 - 응시자가 참석했습니다.
새로운 무인 항공기는 2에서 운영되었던 장거리 고고도 정찰 용 Lockheed U-1956의 대체품으로 간주되었습니다.
Teledyne Ryan은 이미 디자인 경험이 있습니다. 무적의. 이 회사에서 만든 장거리 고고도 정찰 AQM-34 Firebee는 베트남에서 잘 작동했으며 수백 대가 제작되었습니다. 드론.
1999에서 회사는 Northrop Grumman에 흡수되어 사업부가되었습니다.
RQ-4는 낮은 연신율의 날개가있는 일반적인 공기 역학적 인 설계에 따라 제작되었습니다. 보잉 사의 관심사에 의해 생산 된 날개는 완전히 탄소 계 복합 재료로 만들어졌다.

이로써 연신율이 높은 얇고 가볍고 강한 날개를 만들 수있었습니다. 날개에는 최소한 두 개의 외부 정지 지점이 있으며, 각각 450 kg까지의 하중을 고려하여 설계되었습니다. 노즈 휠이있는 섀시 3 점. 노즈 랜딩 기어에는 휠이 하나 있고, 언더윙 스탠드에는 두 개의 바퀴가 있습니다. 세미 모노코크 동체는 Teledyne Ryan이 알루미늄 합금으로 제조합니다. 그것은 세 가지 주요 부분으로 구성됩니다. 기기 실은 정면에 있습니다. 그곳에는 대형 방사능 레이돔 아래에 직경 1.22 미터의 위성 접시 파라볼 릭 안테나가있다. 모든 정보 장비는 같은 구획에 있습니다. 중간 부분에는 대형 연료 탱크가 있고 꼬리 부분에는 Allison AE 3007H 제트 터보 팬 엔진이 있습니다. 엔진은 비즈니스 클래스 Citation-X 및 EMB-145 항공기에서 거의 변경되지 않았습니다. 제어 시스템을 조금 변경 한 후에 엔진은 최대 21 300 미터의 고도에서 꾸준히 작동합니다.
오로라 플라이트 사이언스 (Ourora Flight Sciences)에서 제조 한 V-tail도 복합 재료로 만들어졌습니다. 날개 길이는 35 미터, 길이 - 13,3 미터, 이륙 중량은 15 톤에 도달합니다. 유닛은 최대 30 미터 고도에서 18000 시간 동안 순찰 할 수 있습니다.
노스 롭 그루먼 (Northrop Grumman) 개발자 회사의 추정에 따르면, 글로벌 호크 (Global Hawk)는시고 넬라 (Sigonella)에서 요하네스 버그 (Johannesburg)까지의 거리를 커버 할 수 있으며, 한 번의 연료 보급 스테이션에서 돌아갈 수 있습니다.
처음으로 글로벌 호크는 에드워즈 공군 기지에서 28 2 월 1998 년을 비행했습니다.
첫 번째 비행에서는 9750 미터의 고도에 280 km / h의 속도로 도달했습니다. 차동 GPS 네비게이션 시스템을 사용했기 때문에 착륙 후 활주로 축으로부터의 이탈은 0,5 미터보다 작았습니다.

Google 어스 : 에드워즈 공군 기지의 글로벌 호크 위성 이미지
최초의 7 내장 장치는 "고급 기술 데모"(ACTD) 프로그램의 틀에서 만들어졌으며 특수 작업 수행 능력을 평가하기위한 것입니다. 세계 상황이이 UAV에 대한 높은 수요를 제공했으며, 첫 번째 시제품이 즉시 아프가니스탄에 보냈습니다.
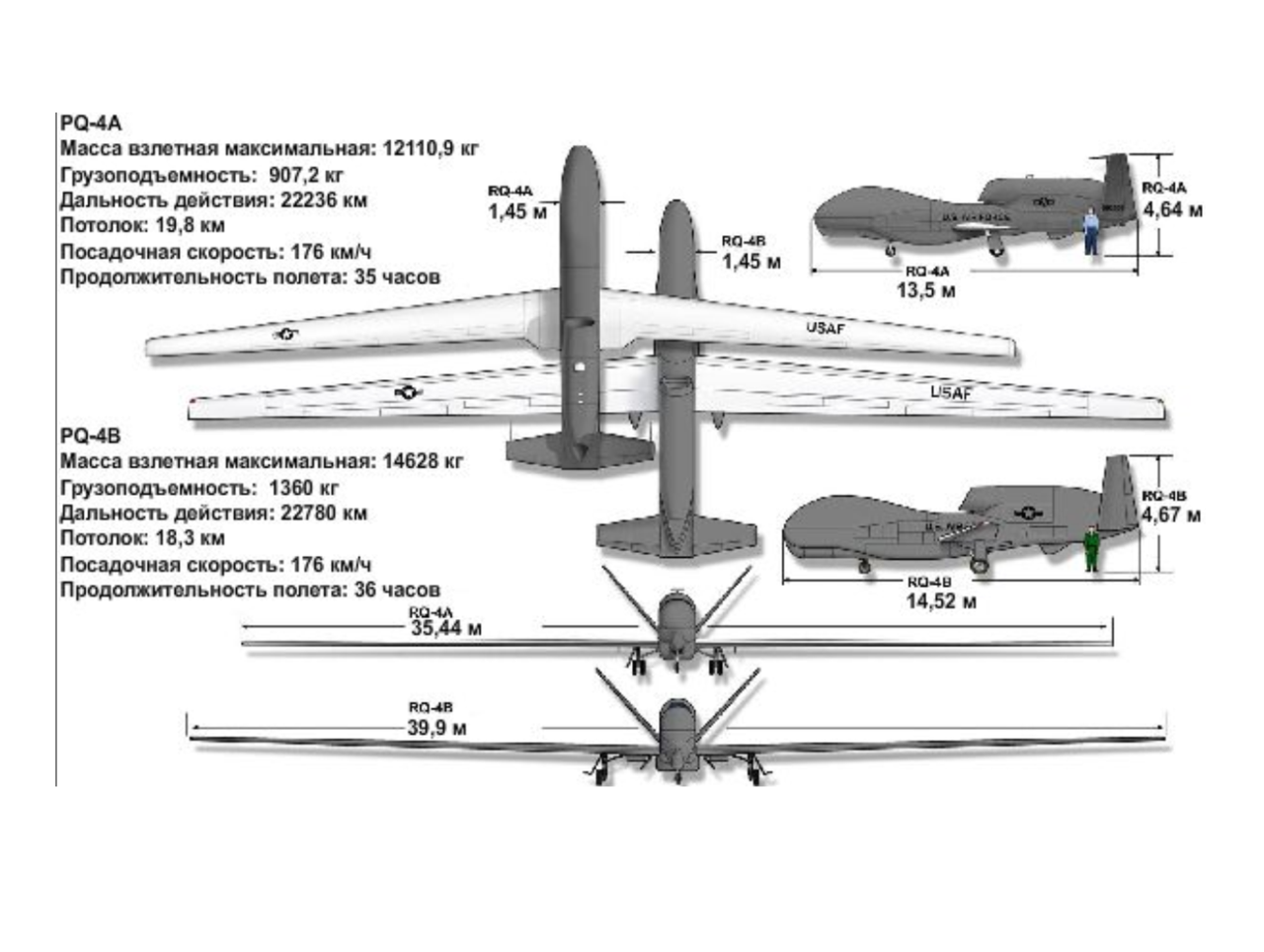
RQ-4 Global Hawk의 생산은 진행중인 개발과 병행하여 수행되었습니다. 그것은 9 개의 BLA 10 블록 (모델 RQ-4A라고도 함)으로 만들어졌으며 그 중 2 개는 즉시 미국 해군을 인수했습니다. 이라크에 3 대의 차량이 보냈습니다. 10 장비의 최초 생산 수정본의 최신 UAV는 올해 26 6 월 2006에서 받았다.
또한 모델 RQ-4의 프레임 워크에서 다음과 같이 나타났습니다.
20 블록 - 페이로드 및 날개 범위가 39,8 m까지 증가하면 비행 범위가 8700 해리로 줄어 들었습니다.
30 블록은 8 월 2011에서 미국 공군이 공식적으로 채택한 수정 된 버전입니다.
블록 40 - 올해의 11 월 16에서 2009의 첫 비행을했습니다. 블록 20 / 30의 이전 수정본과의 주요 차이점은 다중 플랫폼 레이더 MP-RTIP입니다.
한 기계의 비용은 약 35 백만입니다. $ (개발과 함께 비용은 123.2 백만에 도달합니다. $). 지금까지 40 무인기에 대한 모든 수정 사항이 수집되었습니다.
UAV는 다양한 정찰 장비의 플랫폼으로 사용됩니다. 지능 장비의 세 가지 하위 시스템이 Global Hawk에 설치됩니다. 그들은 서로 다른 파장에서 작동하며 동시에 작동 할 수 있습니다.
레이 시온 (Raytheon)이 제조 한 인공 구경의 레이더는 모든 기상 조건에서 작동하도록 설계되었습니다. 일반 모드에서는 1 미터의 해상도로 지형의 레이더 이미지를 제공합니다. 낮에는 138,000 km 거리에있는 2 km200 영역에서 이미지를 얻을 수 있습니다. 포인트 모드에서 2 x 2 km 크기의 영역을 24 시간의 1900 시간에 0,3 해상도로 캡처 할 수 있습니다. 도플러 효과를 사용하면 속도가 7 km / h 이상인 경우 이동하는 대상을 동반 할 수 있습니다
두 개의 레이더 안테나 (동체의 계기 실 하부의 측면에 1.21 m 길이가 있음). 무게가 290 kg 인 전자 장비는 6 kW의 전기를 소비합니다.
주간 전기 광학 디지털 카메라는 휴즈 (Hughes)가 제조하고 고해상도 이미지를 제공합니다. 센서 (1024 x 1,024 픽셀)는 초점 거리가 1750 mm 인 망원 렌즈와 관련됩니다. 프로그램에 따라 두 가지 작동 모드가 있습니다. 첫 번째는 10 킬로미터의 대역폭을 스캔하는 것입니다. 두 번째는 2 영역 x 2 km의 상세한 묘사입니다. 야간 이미지를 얻으려면 IR 센서가 사용됩니다 (640 x 480 픽셀). 그는 동일한 망원 렌즈를 사용합니다. 렌즈는 80 각도로 회전 할 수 있습니다.

글로벌 호크와 EO / IR 센서 유닛
레이더, 요일 및 적외선 카메라는 동시에 작동 할 수 있으므로 많은 양의 정보를 얻을 수 있습니다. 결합 된 주간 / 야간 적외선 카메라는 정보 출력 속도가 40 / 초의 400 Mbps 해상도에 따라 초당 백만 픽셀입니다. 온보드 데이터 수집 및 저장 시스템은 결과 디지털 이미지를 압축하여 기록합니다.
소비자에게 정보를 전송하기 위해 여러 통신 채널을 사용할 수 있습니다. 위성 채널에서 데이터 전송 속도는 50 Mbps입니다. 이러한 목적을 위해 위성 통신 시스템 SATCOM, 안테나 직경 1.22 미터가 사용됩니다. 시선 범위 내의 무선 채널 UHF 대역에서 137 Mbps의 속도로 정보를 전송할 수 있습니다.
정보는 지상 제어 국과 이륙 / 착륙 제어 국으로 보내진다. 지상국에 연결되지 않은 사용자는 Global Hawk UAV에서 직접 이미지를 수신 할 수 있습니다.
Global Hawk는 기존 전술 항공 정찰 시스템 (비행 계획, 데이터 처리, 운영 및 정보 보급)에 통합되어 있습니다. 그것은 시스템에 연결되어 있습니다 : 통합 지능 지원 시스템 (JDISS) 및 글로벌 지휘 통제 시스템 (GCCS). 결과 이미지는 즉시 사용할 수 있도록 운영 지휘관에게 전송할 수 있습니다. UAV에서 얻은 데이터는 표적 탐지, 정찰에 대한 충격 작전 계획 및 다른 작업 해결에 사용됩니다.
스텔스 기술을 사용하지 않는 무인 정찰기는 충분히 높은 생존율을 가져야합니다. 이를 위해 Global Hawk에는 AN / ALR 89 RWR 레이더 및 재밍 스테이션이있는 방사선 탐지기가 장착되어 있습니다. 필요한 경우 견인 된 방해 기인 ALE-50을 사용할 수 있습니다. 실제 상황의 시뮬레이션에 대한 실험에 따르면, Global Hawk는 비행 경로가 현재 상황 (외부 활성 전투 지역)을 고려하여 계획된 경우 평균적으로 200 이상의 순항을 할 수 있습니다.
Global Hawk 시스템의 접지 세그먼트에는 작업 제어 블록과 Raytheon이 제작 한 발사 및 유지 보수 요소가 포함되어 있습니다. 작업 제어 블록은 이미지의 계획, 제어, 처리 및 전송을 담당합니다. 발사 및 정비 시스템은 정확한 이륙 및 착륙을 위해 전 지구 위성 위치 확인 시스템의 정확한 차등 보정을 제공하며 기내 GPS는 관성 항법 시스템과 함께 사용됩니다. 지상국 요소의 분리로 인해 각 지점은 세계의 다른 지점에 위치 할 수 있습니다. 작업 제어 블록은 종종 주 제어점과 함께 위치합니다. 두 요소는 직접 통신 및 위성 통신 장비 용 내부 안테나와 함께 군용 컨테이너에 배치됩니다.

UAV RQ-4 Global Hawk는 아프가니스탄, 이라크 및 리비아의 전투 작전 중에 사용되었습니다. 시리아에 대한 작전 중에 적용될 가능성이 가장 높습니다.
글로벌 호크의 전략 고고도 정찰 RQ-4을 전세계의 다른 지역에서 사용하기 위해 인프라가 설치되고 장비가 설치되고 있습니다.

Google 어스 위성 이미지 : Baele 공군 기지의 Global Hawk 및 U-2 정찰기
첫 번째 단계에서는 유럽, 중동 및 북아프리카에서의 효과적인 사용에 관한 과제가 설정됩니다. 이를 위해 이탈리아 WWF Sigonella의 영토에있는 Sicily 섬에 미 공군 기지를 사용할 계획입니다.
유럽 및 아프리카 지역을 포함하여 항공 정찰 및 감시를 수행하는 주요 수단으로 Global Hawk type RQ-4 UAV를 선택하는 것은 결코 우연한 일이 아닙니다. 현재 39,9에 도달하는 날개 폭이있는이 무인 항공기는 실제 비행하지 않은 "UAV의 왕"이라고해도 과언이 아닙니다. 이 장치는 약 14,5 톤의 이륙 중량을 가지며 1300 킬로그램 이상의 적재 하중을 운반합니다. 그는 시간당 36 킬로미터의 속도를 유지하면서 착륙 및 570 시간까지 급유하지 않고 공중에 머무를 수 있습니다. BLA 페리가 22 수천 킬로미터를 초과합니다.

군사 정보 작업 이외에도 RQ-4 Global Hawk는 과학적 목적으로 환경 모니터링에 적극적으로 사용됩니다.
고등 연구 비행을 위해 Dreyden 과학 센터의 NASA에서 여러 대의 기계를 사용합니다. 무인 항공기는 오존층을 측정하고 세계 해양을 통해 오염 물질을 이동시키는 데 사용되었습니다.

9 월 8 일, 2010는 허리케인 발생에 대한 대서양 분지 연구의 틀에서 NASA 창세기 및 급속 강화 프로그램 (NASA)에 참여했습니다. Ku-band의 레이더, 낙뢰 영상 센서, 낙하산 라디오 존데가 방출되는 카메라 등 기상 센서가 장착되었습니다.
드론은 칠레에 기반을두고 일할 때 남극을 연구하는 데 사용할 수 있습니다.
자연 재해의 여파로 허리케인 아이크 (Hurricane Ike)와 캘리포니아 화재로 인한 피해를 평가하기 위해 미국 영토를 비행했습니다.
북부 캘리포니아 2008 년에있는 미국 해군의 글로벌 호크에 의해 촬영 된 화재의 사진.
글로벌 호크 인수에 대한 관심은 일부 미국 동맹국들에 의해 표현되었습니다.
독일은 구식 순찰 항공기 Breguet Atlantic을 대신하여 RQ-4B를 선택하여 Euro Hawk라고 명명했습니다. 차는 원래 글라이더를 유지했지만 EADS 정찰 장비를 받았습니다. 센서 패키지에는 6 윙 행거가 포함됩니다.

EuroHawk은 공식적으로 8의 10 월 2009에 서비스를 시작했으며 29은 6 월 2010에서 첫 비행을 시작했습니다. 그는 5 월 2011에서 독일 비행을 시작하기 전에 에드워즈 공군 기지에서 비행 테스트를 몇 달 동안 받았다. 처음에는 Ingolstadt Manching Airport의 WTD61에 입사했습니다.
첫 번째 5 기계의 비용은 개발을위한 430 백만 유로와 구매 금액과 동일한 금액이었습니다.
캐나다는 해상 및 지상 감시를 위해 CP-140 Aurora 순찰 항공기를 대체 할 계획입니다. 극저온 조건 하에서 북극 그루 먼 (Northrop Grumman)의 전문가들은 북극에서의 작업을 위해 북극 호크 (Polar Hawk)를 개조했습니다.
또한 호주, 스페인, 일본과 공급 협상이 진행 중이다. 인도는 잠재적 인 구매자이기도합니다.
자료에 따르면,
http://www.northropgrumman.com/capabilities/globalhawk/Pages/default.aspx
http://warinform.ru/News-view-354.html
http://airspot.ru/catalogue/item/ryan-rq-4-global-hawk
http://tech-life.org/arms/86-rq-4-global-hawk
정보