실험적인 전투 차량 Black Knight
원격 제어 군용 장비가 널리 보급되고 있습니다. 다양한 목적으로 유사한 기계가 상당히 많으며 그러한 프로젝트의 수가 꾸준히 증가하고 있습니다. 이러한 개발 중 일부는 이미 군대의 구조 (무인 항공기 등)에 확고히 진입 한 반면 다른 설계는 아직 설계 또는 테스트 단계에 있습니다. 동시에 여러 가지 이유로 현재 원격 제어 항공기 및 헬리콥터에 가장 큰 관심을 기울이고 있습니다. 무인 탱크 또는 자주포는 아직 군대의 전투 무기가되지 않았다. 그럼에도 불구하고이 방향으로의 작업은 이미 진행 중입니다. 2007 년에 BAE Systems는이 문제를 해결하도록 설계된 새 프로젝트에 대한 정보를 발표했습니다.

지난 10 년 전반에 BAE Systems의 전문가들은 승무원의 직접적인 존재가 필요하지 않은 지상 기반의 전투 장비 개발 문제에 적극적으로 참여했습니다. 이 작업은 UGV (Unmanned Ground Vehicle - "무인 지상 차량") 프로그램에 따라 수행되었습니다. 이 프로젝트의 목표는 지상군을위한 본격적인 전투 차량 개발에 필요한 기본 시스템과 기술을 개발하는 것이 었습니다. UGV 프로그램의 첫 번째 결과는 이천 분의 중간에 나타났습니다. 2006에서는 특수 제작 된 실험 장비의 첫 번째 테스트가 진행되었으며 내년 말까지 BAE Systems는 몇 가지 기술적 인 세부 사항을 발표했습니다.
UGV 프로그램의 첫 번째 결과는 2006 년에 실험용 Black Knight 장갑차 ( "Black Knight")가 건설 된 것입니다. M2 Bradley 보병 전투 차량의 일부 구성 요소는 설계에 널리 사용되었습니다. "흑기사"는 탱크와 비슷한 전투기이지만 BMP 수준의 방어와 무기를 갖추고 있습니다. 이 모양은 프로젝트의 실험적인 특성 때문이었습니다. 최초의 Black Knight 프로토 타입은 기본 기술 솔루션을 개발하기 위해 독점적으로 제작되었으므로 얻은 솔루션과 기술을 사용하여 제작 된 미래의 생산 시스템은 다른 모습을 보입니다.
그러나 현재의 형태에서 "흑기사"는 지상군의 구조에서 틈새를 발견 할 수 있습니다. 싸우는 기계는 작은 크기의 탱크 종류입니다. 실험 장비의 길이는 5 미터를 초과하지 않으며 폭은 2,44 m이고 높이는 2 m 이하이다. 프로토 타입의 전투 중량은 9,5 톤과 거의 같다. 크기와 무게로 인해 Black Knight는 록히드 C-130 중형 군용 항공기로 운송 될 수 있습니다. 지금까지 이것은 프로젝트의 흥미로운 기능 일 뿐이었지만 앞으로는 무게와 치수 특성으로 새로운 전투 차량을 사용할 수 있습니다.

최초의 Black Knight 프로토 타입에는 마력 300가있는 Caterpillar 엔진이 장착되어 있습니다. 사용 가능한 사진에서 볼 수 있듯이 엔진 실은 케이스 전면에 있습니다. 추적 된 하부 구조에는 5 개의로드 휠이 장착되어 있습니다. 그런 발전소와 섀시 프로토 타입 기계 인 "Black Knight"를 가지고 고속도로에서 추정되는 속도는 시속 77 킬로미터까지 도달 할 수 있습니다. 다른 운전 실적은 아직 발표되지 않았습니다.
기계의 경우에는 비교적 큰 타워가 장착되어 있습니다. 크기면에서 볼 때 내부 용적의 대부분은 다양한 전자 장비에 대해 제공됩니다. 전자 기술 외에도 Black Knight는 무기에 BMN M2 Bradley. 이것은 자동 총 M242 구경 25 밀리미터와 7,62-mm 기관총 M240과 쌍을 이루고 있습니다. 무기의 선택은 일반적으로 외모가있는 경우와 마찬가지로 프로젝트의 실험적 성격 때문이었을 것입니다. 25-mm 건과 기관총은 새로운 무선 전자 시스템의 일반적인 기능을 테스트하기에 충분합니다.

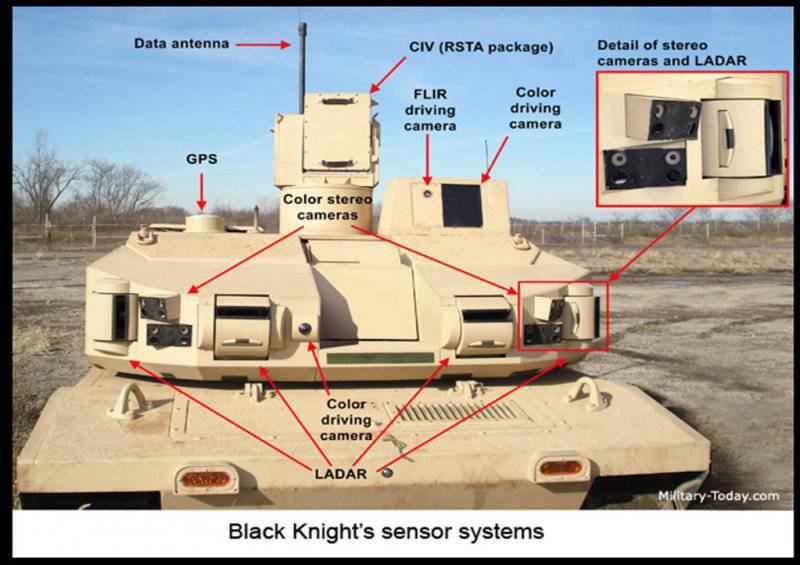
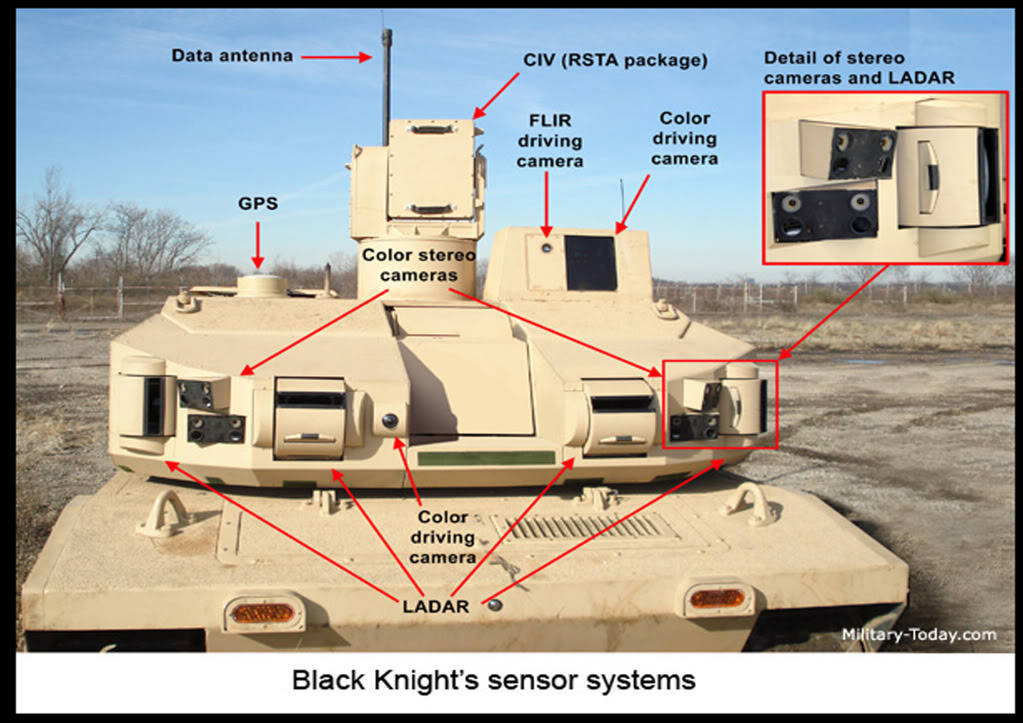
"흑기사"탑의 앞면과 맨 위에는 수많은 센서와 시스템이 장착되어 있습니다. 따라서 여러 대의 비디오 카메라 중 하나가 무기 옆에 설치되었습니다. 또한, 타워 전면에는 4 개의 입체 비디오 카메라 블록이 있습니다 (각 광대뼈에 2 개). 이러한 장비는 단지의 운영자가 자동차를 운전할 수있게 해주 며 환경의 완전한 그림을 가지고 있으며 이는 보통의 관측 장비를 통해 관찰 된 것과는 약간 다릅니다. 타워 전면과 광대뼈에는 회전 장치에 4 개의 레이저 레이더 (LADAR)가 있습니다. 그들의 위치에서 볼 수 있듯이, 가운데 두 사람 (무기의 측면)은 수평면에서 지형을 스캔하고 두 극단 (타워의 광대뼈에서)을 수직으로 스캔합니다. 특징적인 사다리꼴 케이스의 타워 지붕에는 운전과 조준을위한 비디오 카메라가 있습니다. 파노라마 식 관측 장치는 회전식으로 설치된 카메라를 사용했습니다. 또한 타워에는 데이터 안테나, GPS 네비게이션 시스템 수신기 및 기타 여러 시스템이 있습니다.
카메라, 레이더 및 센서에서 수집한 모든 정보는 보안 무선 채널을 통해 ROCS(Robotic Operator Control Station) 제어 스테이션으로 전송됩니다. 로봇"). 제어판 및 모든 관련 시스템은 소형 휴대용 콘솔의 형태로 수행되거나 장갑차(예: M2 Bradley BMP 또는 기타 적합한 차량)에 배치된다고 가정합니다. ROCS 스테이션의 화면에는 제어 차량의 시스템 작동에 대한 운전에 필요한 모든 정보와 경로, 목표 및 작업에 대한 데이터가 표시됩니다. 많은 수의 버튼과 스위치가 있는 컨트롤러가 메인 컨트롤로 사용됩니다. 필요한 경우 모션 제어 또는 대상 검색과 같은 일부 기능을 자동 모드에서 작동하는 전자 장치에 할당할 수 있습니다.

첫 번째 보도 자료에서 언급했듯이 일부 기술 솔루션은 2006 테스트에서 테스트되었습니다. 이 작업의 주요 목표 중 하나는 다양한 장애물을 극복하는 것을 포함하여 원격 제어 및 관리 시스템을 사용하여 경로를 따라 장비의 움직임을 해결하는 것이 었습니다. 2007에서는 무기를 사용한 첫 번째 테스트가 진행되었습니다. 그래서 1 월 2007은 Fort Knox (켄터키) 테스트 사이트에서 Black Knight 머신으로부터 어느 정도 떨어져있는 M2 Bradley BMB에 있던 운영자가 그 위치로 이동 한 다음 교육 목표를 감지하고 파기했습니다. 또한이 테스트 동안 자동 제어 장치가 잘 작동하여 장갑차를 운전하고 목표물을 찾는 데 능숙했습니다.
최근 보고서에 따르면, BAE Systems의 설계자는 Black Knight의 성능 향상을 위해 지속적으로 노력하고 있습니다. 그 중 목표는 원격 제어 장갑차의 제어 및 통신 단지를 기존 군용 통신 및 제어 시스템과 완전히 통합하는 것이 었습니다. 또한 유망한 전투 차량은 경관에 대한 부분 정보 만 사용하여 지정된 경로를 따라 독립적으로 이동할 수 있어야합니다. 이 경우 별도로 발사 결정이 운영자에게 남았음을 알 수 있습니다.
UGV 프로그램 전체 및 Black Knight 프로젝트의 진행에 대한 최신 정보는 불과 몇 년 전에 발표되었습니다. 현재 진행중인 프로젝트는 아직 알려지지 않았습니다. 또한 몇 년 전에 등장한 여러 가지 문제가 여전히 중요합니다. 예를 들어, 전투 차량의 독립적 인 이동뿐만 아니라 목표물 검색 및 공격에 대한 자율적 인 작업 가능성에 대한 정보는 아직 없습니다. 또 다른 중요한 문제는 고급 원격 제어 전투 차량의 적용 범위입니다. 다른 옵션들 중에서도, 정찰 차량 및 3 월과 운항 중 보병 전투 차량을 호송하는 것과 같이 작업이 호출되었습니다.
부재로 판단 뉴스 최근 몇 년 동안 UGV 프로그램과 Black Knight 프로젝트 형태의 일부는 테스트 및 실험 테스트 단계에서 심각하게 고착되었습니다. 따라서 가까운 장래에 UGV 프로그램은 군대에서 실용적으로 적합한 원격 제어 지상 장비의 새로운 프로젝트의 기초가 될 수 있습니다. 반면에, 그러한 프로젝트의 복잡성은 다른 결과로 이어질 수 있습니다. 원격 제어 장비를 만드는 것은 다소 복잡한 작업입니다. 완전 자동 작동의 가능성을 포함하는 유사한 프로젝트의 개발은 더욱 어려운 문제가되고 있습니다. 분명히, BAE Systems는 현재 몇 가지 어려움에 직면하고 있으며, 이로 인해 프로젝트가 심각하게 지연되었습니다.
해당 사이트의 자료 :
http://gurkhan.blogspot.ru/
http://defense-update.com/
http://rnd.cnews.ru/
http://dailytech.com/
http://popmech.ru/
지난 10 년 전반에 BAE Systems의 전문가들은 승무원의 직접적인 존재가 필요하지 않은 지상 기반의 전투 장비 개발 문제에 적극적으로 참여했습니다. 이 작업은 UGV (Unmanned Ground Vehicle - "무인 지상 차량") 프로그램에 따라 수행되었습니다. 이 프로젝트의 목표는 지상군을위한 본격적인 전투 차량 개발에 필요한 기본 시스템과 기술을 개발하는 것이 었습니다. UGV 프로그램의 첫 번째 결과는 이천 분의 중간에 나타났습니다. 2006에서는 특수 제작 된 실험 장비의 첫 번째 테스트가 진행되었으며 내년 말까지 BAE Systems는 몇 가지 기술적 인 세부 사항을 발표했습니다.
UGV 프로그램의 첫 번째 결과는 2006 년에 실험용 Black Knight 장갑차 ( "Black Knight")가 건설 된 것입니다. M2 Bradley 보병 전투 차량의 일부 구성 요소는 설계에 널리 사용되었습니다. "흑기사"는 탱크와 비슷한 전투기이지만 BMP 수준의 방어와 무기를 갖추고 있습니다. 이 모양은 프로젝트의 실험적인 특성 때문이었습니다. 최초의 Black Knight 프로토 타입은 기본 기술 솔루션을 개발하기 위해 독점적으로 제작되었으므로 얻은 솔루션과 기술을 사용하여 제작 된 미래의 생산 시스템은 다른 모습을 보입니다.
그러나 현재의 형태에서 "흑기사"는 지상군의 구조에서 틈새를 발견 할 수 있습니다. 싸우는 기계는 작은 크기의 탱크 종류입니다. 실험 장비의 길이는 5 미터를 초과하지 않으며 폭은 2,44 m이고 높이는 2 m 이하이다. 프로토 타입의 전투 중량은 9,5 톤과 거의 같다. 크기와 무게로 인해 Black Knight는 록히드 C-130 중형 군용 항공기로 운송 될 수 있습니다. 지금까지 이것은 프로젝트의 흥미로운 기능 일 뿐이었지만 앞으로는 무게와 치수 특성으로 새로운 전투 차량을 사용할 수 있습니다.
최초의 Black Knight 프로토 타입에는 마력 300가있는 Caterpillar 엔진이 장착되어 있습니다. 사용 가능한 사진에서 볼 수 있듯이 엔진 실은 케이스 전면에 있습니다. 추적 된 하부 구조에는 5 개의로드 휠이 장착되어 있습니다. 그런 발전소와 섀시 프로토 타입 기계 인 "Black Knight"를 가지고 고속도로에서 추정되는 속도는 시속 77 킬로미터까지 도달 할 수 있습니다. 다른 운전 실적은 아직 발표되지 않았습니다.
기계의 경우에는 비교적 큰 타워가 장착되어 있습니다. 크기면에서 볼 때 내부 용적의 대부분은 다양한 전자 장비에 대해 제공됩니다. 전자 기술 외에도 Black Knight는 무기에 BMN M2 Bradley. 이것은 자동 총 M242 구경 25 밀리미터와 7,62-mm 기관총 M240과 쌍을 이루고 있습니다. 무기의 선택은 일반적으로 외모가있는 경우와 마찬가지로 프로젝트의 실험적 성격 때문이었을 것입니다. 25-mm 건과 기관총은 새로운 무선 전자 시스템의 일반적인 기능을 테스트하기에 충분합니다.

"흑기사"탑의 앞면과 맨 위에는 수많은 센서와 시스템이 장착되어 있습니다. 따라서 여러 대의 비디오 카메라 중 하나가 무기 옆에 설치되었습니다. 또한, 타워 전면에는 4 개의 입체 비디오 카메라 블록이 있습니다 (각 광대뼈에 2 개). 이러한 장비는 단지의 운영자가 자동차를 운전할 수있게 해주 며 환경의 완전한 그림을 가지고 있으며 이는 보통의 관측 장비를 통해 관찰 된 것과는 약간 다릅니다. 타워 전면과 광대뼈에는 회전 장치에 4 개의 레이저 레이더 (LADAR)가 있습니다. 그들의 위치에서 볼 수 있듯이, 가운데 두 사람 (무기의 측면)은 수평면에서 지형을 스캔하고 두 극단 (타워의 광대뼈에서)을 수직으로 스캔합니다. 특징적인 사다리꼴 케이스의 타워 지붕에는 운전과 조준을위한 비디오 카메라가 있습니다. 파노라마 식 관측 장치는 회전식으로 설치된 카메라를 사용했습니다. 또한 타워에는 데이터 안테나, GPS 네비게이션 시스템 수신기 및 기타 여러 시스템이 있습니다.
카메라, 레이더 및 센서에서 수집한 모든 정보는 보안 무선 채널을 통해 ROCS(Robotic Operator Control Station) 제어 스테이션으로 전송됩니다. 로봇"). 제어판 및 모든 관련 시스템은 소형 휴대용 콘솔의 형태로 수행되거나 장갑차(예: M2 Bradley BMP 또는 기타 적합한 차량)에 배치된다고 가정합니다. ROCS 스테이션의 화면에는 제어 차량의 시스템 작동에 대한 운전에 필요한 모든 정보와 경로, 목표 및 작업에 대한 데이터가 표시됩니다. 많은 수의 버튼과 스위치가 있는 컨트롤러가 메인 컨트롤로 사용됩니다. 필요한 경우 모션 제어 또는 대상 검색과 같은 일부 기능을 자동 모드에서 작동하는 전자 장치에 할당할 수 있습니다.

첫 번째 보도 자료에서 언급했듯이 일부 기술 솔루션은 2006 테스트에서 테스트되었습니다. 이 작업의 주요 목표 중 하나는 다양한 장애물을 극복하는 것을 포함하여 원격 제어 및 관리 시스템을 사용하여 경로를 따라 장비의 움직임을 해결하는 것이 었습니다. 2007에서는 무기를 사용한 첫 번째 테스트가 진행되었습니다. 그래서 1 월 2007은 Fort Knox (켄터키) 테스트 사이트에서 Black Knight 머신으로부터 어느 정도 떨어져있는 M2 Bradley BMB에 있던 운영자가 그 위치로 이동 한 다음 교육 목표를 감지하고 파기했습니다. 또한이 테스트 동안 자동 제어 장치가 잘 작동하여 장갑차를 운전하고 목표물을 찾는 데 능숙했습니다.
최근 보고서에 따르면, BAE Systems의 설계자는 Black Knight의 성능 향상을 위해 지속적으로 노력하고 있습니다. 그 중 목표는 원격 제어 장갑차의 제어 및 통신 단지를 기존 군용 통신 및 제어 시스템과 완전히 통합하는 것이 었습니다. 또한 유망한 전투 차량은 경관에 대한 부분 정보 만 사용하여 지정된 경로를 따라 독립적으로 이동할 수 있어야합니다. 이 경우 별도로 발사 결정이 운영자에게 남았음을 알 수 있습니다.
UGV 프로그램 전체 및 Black Knight 프로젝트의 진행에 대한 최신 정보는 불과 몇 년 전에 발표되었습니다. 현재 진행중인 프로젝트는 아직 알려지지 않았습니다. 또한 몇 년 전에 등장한 여러 가지 문제가 여전히 중요합니다. 예를 들어, 전투 차량의 독립적 인 이동뿐만 아니라 목표물 검색 및 공격에 대한 자율적 인 작업 가능성에 대한 정보는 아직 없습니다. 또 다른 중요한 문제는 고급 원격 제어 전투 차량의 적용 범위입니다. 다른 옵션들 중에서도, 정찰 차량 및 3 월과 운항 중 보병 전투 차량을 호송하는 것과 같이 작업이 호출되었습니다.
부재로 판단 뉴스 최근 몇 년 동안 UGV 프로그램과 Black Knight 프로젝트 형태의 일부는 테스트 및 실험 테스트 단계에서 심각하게 고착되었습니다. 따라서 가까운 장래에 UGV 프로그램은 군대에서 실용적으로 적합한 원격 제어 지상 장비의 새로운 프로젝트의 기초가 될 수 있습니다. 반면에, 그러한 프로젝트의 복잡성은 다른 결과로 이어질 수 있습니다. 원격 제어 장비를 만드는 것은 다소 복잡한 작업입니다. 완전 자동 작동의 가능성을 포함하는 유사한 프로젝트의 개발은 더욱 어려운 문제가되고 있습니다. 분명히, BAE Systems는 현재 몇 가지 어려움에 직면하고 있으며, 이로 인해 프로젝트가 심각하게 지연되었습니다.
해당 사이트의 자료 :
http://gurkhan.blogspot.ru/
http://defense-update.com/
http://rnd.cnews.ru/
http://dailytech.com/
http://popmech.ru/
정보