파일럿 워커 "Ortonog"
보행 추진력을 가진 자주 주행 차량은 오랫동안 과학자, 엔지니어 및 잠재 사용자를 끌어 들였습니다. 유효한 연구는 여러 종류의 표면에서 휠 또는 궤적 차량에 비해 워커의 장점을 명확하게 보여줍니다. 동시에, 지금까지 보행 기술 프로젝트 중 프로토 타입 테스트 단계를 거치지 않았습니다. 높은 도로 성능의 대가는 표면의 상태, 응집체의 작동 등을 제어 할 수있는 설계 및 필요한 제어 시스템의 복잡성이 더 커집니다. 며칠 전, 기존 문제 중 일부를 해결하기 위해 설계된 워커의 다음 샘플을 시연했습니다.

Volgograd State Technical University (VolSTU)에서 최근 개최 된 V International Scientific and Practical Conference "차량 및 시스템의 발전 -2013"에서 37 국가의 행사 참여자는 실험 장치 "Ortonog"로 표시되었습니다. 볼고그라드 공과 대학교의 이론 역학 팀과 TsKB Titan의 직원이 개발 한 워킹 머신은 제어 시스템을 테스트하고 원래의 직각 추진 장치가 장착 된 워커의 기능을 시연하도록 설계되었습니다. 볼고그라드 오 토노 그 (Volgograd Ortonog)는 1 년 전에 처음 발견되었지만 제어 시스템의 불완전성에 의해 영향을 받았다. 그 이후로 프로젝트 개발자는 기계 장치가 작동하는 알고리즘을 개선하여 특성이 눈에 띄게 증가했습니다. Ortonog 회의에서 데모를하는 동안, 그는 데모 사이트에서 자유롭게 걸어 제어판에서 명령을 받았습니다.
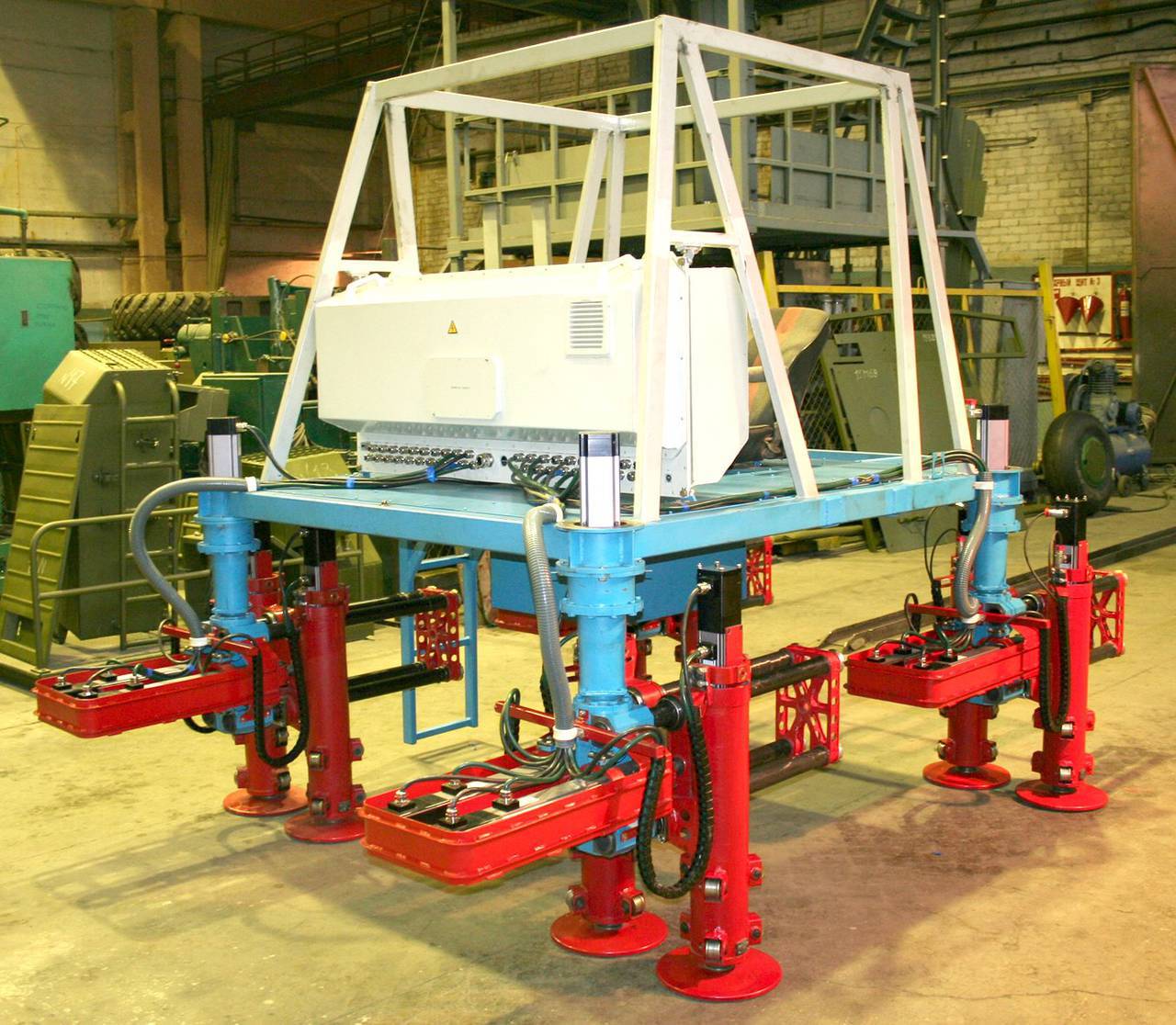
실험 기계 "Ortonog"의 디자인은 비교적 간단하지만 동시에 효과적입니다. 장치의 프레임에 운전자 - 운전자 및 제어 시스템의 작업 공간이있는 운전실을 설치하십시오. 그 뒤에 작은 크기의 가솔린 발전기가 장착되어 워커에게 작동에 필요한 전력을 공급합니다. 4 개의 직각 보행 스러 스터 블록이 프레임의 하부에 고정되어있다. Ortonog 자동차의 프로토 타입은 러시아 국기의 색상으로 칠해져 있는데, 다른 것들 중에서도 다양한 유닛의 시각적 식별을 용이하게합니다. 따라서 운전실 요소는 흰색으로 칠하고 프레임은 파란색으로, 섀시는 빨간색으로 칠합니다. 약 1200 kg의 무게를 지닌 실험 장비는 3,3 미터의 차수의 총 길이, 2,2 미터 이하의 너비 및 2,75 미터의 높이를 갖는다.
섀시의 네 블록 각각은 일반적으로 수직 이동 메커니즘, 수평 이동 메커니즘 및 회전 메커니즘의 세 가지 요소로 나뉩니다. 전자는 구성에 전동 실린더가 있으며 개폐식 봉에 위치한 원형 지지대를 들어 올리거나 내리는 역할을합니다. Ortonog는 섀시의 각 블록에 대해 2 개씩 8 개의 지원을 제공합니다. 가이드와 액추에이터로 구성된 수평 이동 메커니즘은 실린더와로드를 지지대와 함께 움직이게 설계되었습니다. 섀시의 각 블록에는 두 세트의 가이드와 드라이브가 있으며 각 실린더에는 하나의 지지대가 있습니다. 마지막으로 회전 기어는 전체 섀시 블록을 수직 축을 중심으로 전개합니다. 실험 장치의 전체 하부 구조는 전기 구동 장치를 기반으로합니다.
평평한 표면에서 Ortonog 보행기의 움직임은 다음과 같습니다. 이 기계는 8 개의 지지대 중 4 개 (섀시의 각 블록에서 하나씩)를 들어 올리고 수평 이동 메커니즘을 사용하여 앞으로 이동시킵니다. 또한 서포트가 표면에 떨어지고 사이클이 반복되지만 이번에는 다른 네 개의 서포트가 상승하고 앞으로 나아 간다. 이동하는 동안 Ortonog는 수직으로 변위 드라이브를 교대로 사용하며 수평 메커니즘은 거의 항상 작동합니다. 필요한 경우 회전 메커니즘이 활성화됩니다. 동기식 또는 분리형 작동으로 필요한 각도로 회전 할 수 있습니다. 디자인에서 알 수 있듯이 실험용 워커는 최소 반경으로 회전 할 수 있습니다.
모든 주행 장치 메커니즘에는 작업에 대한 정보를 수집하는 센서가 장착되어 있습니다. 이 정보는 운전자의 운전자 콘솔로 전달되며 기계 작동을 조정할 수 있습니다. Ortonog 프로젝트에서 가장 큰 문제 중 하나는 운전자의 작업과 관련이 있습니다. 실습에서 알 수 있듯이 평평한면에서 운전할 때만 사람을 효과적으로 작동시킬 수 있습니다. 거친 지형 등으로 이동할 필요가있는 경우 운영자는 모든 메커니즘의 작업을 독립적으로 모니터하고 한 번에 또는 다른 필요한 알고리즘을 선택할 수 없습니다. 이와 관련하여, 기계의 기술적 부분과 동시에 자동화 된 컨트롤 컴플렉스가 개발되었습니다.
처음에는 다음과 같은 제어 방법을 사용하여 실험 장비를 테스트했습니다. 콤플렉스 운영자는 비디오 시스템에 의해 전송 된 정보에 따라 장치의 자율적 인 작동을 제어했습니다. 필요하다면, 우선, 장애물을 극복하면서 그는 보행 보조기의 작업을 방해하고 필요한 조정을했습니다. 압도적 인 다수의 기계 제어 작업은 사람의 개입없이 자동화에 의해 수행되었습니다. 이 경우, 실험 장치의 자동화는 시스템 작동에 대한 정보와 센서에서만 우주 공간에서 기계의 위치를 받았다. 비디오 신호를 사용하기위한 어떠한 조치도 취해지지 않았습니다. 기계를 제어하는 데 필요한 정보 수집에 대한 이러한 접근 방식의 결과는 전자 장치가 장애물을 우회 할 수없는 상황이었고 이로 인해 작업자가 개입해야했습니다.

이러한 테스트는 적응 형 워커 컨트롤을 설정하는 데 필요한 정보를 수집하는 데 도움이되었습니다. 특수 장비는 모든 운전자 행동과 센서 정보를 기록했으며 외부 및 내장 비디오 카메라의 신호도 기록했습니다. 앞으로는 기록 된 모든 데이터를 비교하고 메커니즘의 특정 작업에 해당하는 데이터 조각을 선택합니다. 이 정보는 "학습"자동화에 사용되었습니다. 얼핏보기에 컨트롤 시스템을 테스트하고 미세 조정 한 결과는 그리 높지 않습니다. 그러나 작년 말에 이미 Ortonog 장치는 작업자의 도움없이 독립적으로 기울여 진 경사면을 따라 움직이며 표면의 각도에 관계없이 필요한 몸체 위치를 유지할 수있었습니다. 또한이 장치는 독립적으로 멈추고 장애물을 발견하고 사용 가능한 하부 구조 메커니즘을 사용하여 장애의 크기를 결정했습니다.
Ortonog 장비는 아직 실제 사용에 적합한 워킹 머신의 기초가 될 수는 없지만, 그 전망은 이미 가시화되어 있습니다. 이 프로젝트의 진행 상황에 대한 정보에서 볼 수 있듯이 VolSTU와 TsKB "Titan"직원은 효율적인 보행기를 개발하고 좋은 전망을 가진 제어 알고리즘을 만들 수있었습니다. 공식 데이터에 따르면 Ortonog 자동차는 시간당 1,6 킬로미터를 초과하는 속도로 가속 할 수 있습니다. 지지대의 피치 길이 (45 cm)는 프레임의 수평 위치를 유지하면서 최대 40-45 cm까지 장애물을 극복 할 수 있습니다. 장치의 기울기와 관련된보다 복잡한 기동의 경우 장애물의 최대 높이가 80로 증가합니다 (교차 된 해자의 최대 폭은 0,9 미터입니다). 도보 프로펠러는 40 ° 상승을 극복 할 수 있습니다. 경사면을 가로 질러 움직일 때, Ortonog는 60 °에 대한 표면의 경사 각도에서 안정성을 유지합니다. 스위블 섀시 블록을 사용하면 장치가 종 방향 축에 대해 어떤 각도로든 동작 방향을 변경할 수 있습니다. 필요하다면, 옆으로 움직이고 반경 1 미터 이상으로 돌릴 수 있습니다.
Ortonog 프로젝트의 전망에 대해 이야기하는 것은 아직 이르다. 이 프로젝트와 그에 따라 제작 된 장치는 개발 조직의 향후 계획을 완전히 결정하는 순전히 실험적인 특성을 지니고 있습니다. 가까운 장래에 Volgograd Technical University의 "Theoretical Mechanics"부서와 Central Design Bureau "Titan"은 계속해서 추진력과 제어 시스템을 개발할 것입니다. 다양한 표면과 환경에서 워커의 작업을 보장 할 수있는 본격적인 알고리즘을 개발 한 후에야 다음 실험 샘플에서 작업을 시작할 수 있습니다. 다음 프로젝트는 기존 개발 및 실제 적용에 대한 적응을 개선하는 데 사용할 수 있습니다. 가까운 미래에 새로운 프로젝트가 나타날 가능성은 희박합니다. Ortonog 장비 작업을 완료하는 데 수 년이 걸릴 수 있습니다.

해당 사이트의 자료 :
http://cdbtitan.ru/
http://dtm.vstu.ru/
http://vpk.name/

Volgograd State Technical University (VolSTU)에서 최근 개최 된 V International Scientific and Practical Conference "차량 및 시스템의 발전 -2013"에서 37 국가의 행사 참여자는 실험 장치 "Ortonog"로 표시되었습니다. 볼고그라드 공과 대학교의 이론 역학 팀과 TsKB Titan의 직원이 개발 한 워킹 머신은 제어 시스템을 테스트하고 원래의 직각 추진 장치가 장착 된 워커의 기능을 시연하도록 설계되었습니다. 볼고그라드 오 토노 그 (Volgograd Ortonog)는 1 년 전에 처음 발견되었지만 제어 시스템의 불완전성에 의해 영향을 받았다. 그 이후로 프로젝트 개발자는 기계 장치가 작동하는 알고리즘을 개선하여 특성이 눈에 띄게 증가했습니다. Ortonog 회의에서 데모를하는 동안, 그는 데모 사이트에서 자유롭게 걸어 제어판에서 명령을 받았습니다.
실험 기계 "Ortonog"의 디자인은 비교적 간단하지만 동시에 효과적입니다. 장치의 프레임에 운전자 - 운전자 및 제어 시스템의 작업 공간이있는 운전실을 설치하십시오. 그 뒤에 작은 크기의 가솔린 발전기가 장착되어 워커에게 작동에 필요한 전력을 공급합니다. 4 개의 직각 보행 스러 스터 블록이 프레임의 하부에 고정되어있다. Ortonog 자동차의 프로토 타입은 러시아 국기의 색상으로 칠해져 있는데, 다른 것들 중에서도 다양한 유닛의 시각적 식별을 용이하게합니다. 따라서 운전실 요소는 흰색으로 칠하고 프레임은 파란색으로, 섀시는 빨간색으로 칠합니다. 약 1200 kg의 무게를 지닌 실험 장비는 3,3 미터의 차수의 총 길이, 2,2 미터 이하의 너비 및 2,75 미터의 높이를 갖는다.
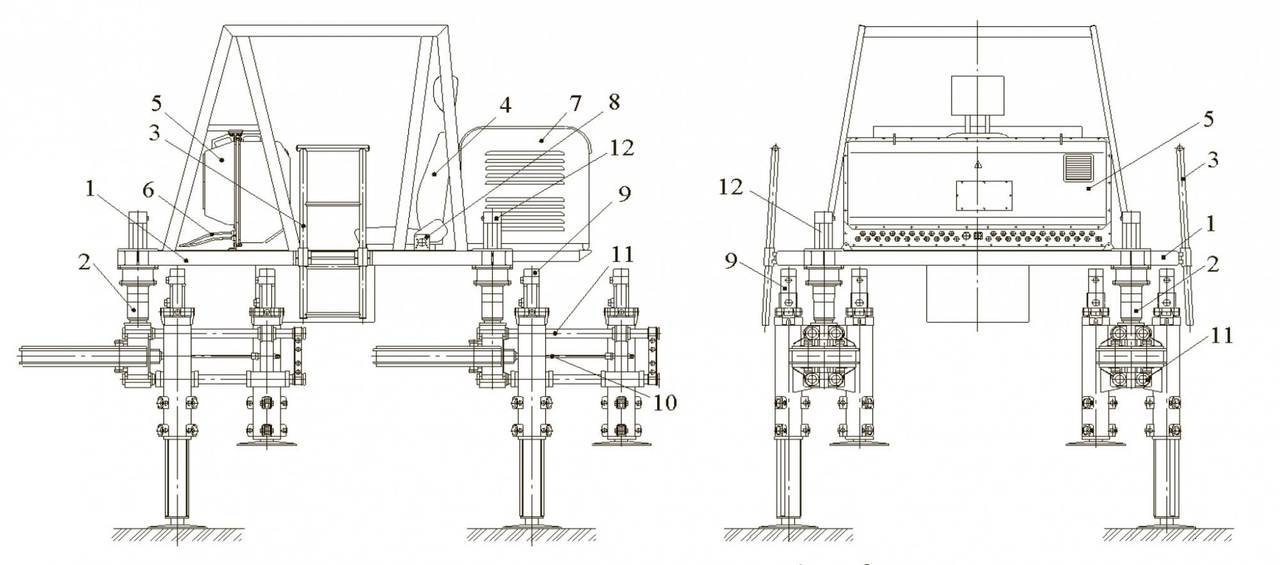
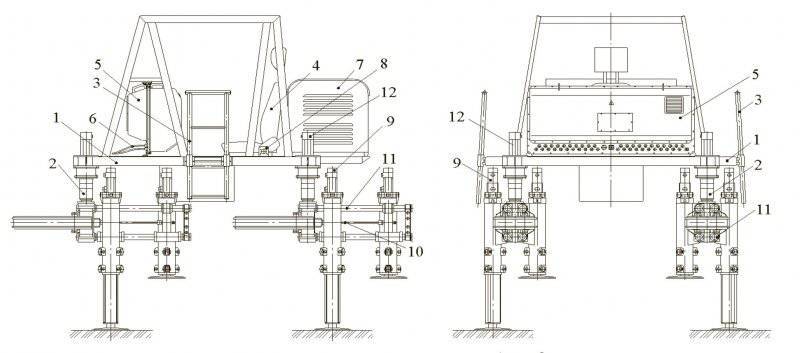
걷기의 구조도 로봇 "Ortonog": 1 - 프레임; 2 - 워킹 무버; 3 - 계단; 4 - 운전석; 5 - 전기 장비 벙커; 6 - 케이블 네트워크; 7 - 온보드 전원 공급 장치; 8 - 패널; 9 - 수직 이동 메커니즘; 10 - 수평 이동 메커니즘; 11 - 가이드; 12 - 회전 메커니즘
섀시의 네 블록 각각은 일반적으로 수직 이동 메커니즘, 수평 이동 메커니즘 및 회전 메커니즘의 세 가지 요소로 나뉩니다. 전자는 구성에 전동 실린더가 있으며 개폐식 봉에 위치한 원형 지지대를 들어 올리거나 내리는 역할을합니다. Ortonog는 섀시의 각 블록에 대해 2 개씩 8 개의 지원을 제공합니다. 가이드와 액추에이터로 구성된 수평 이동 메커니즘은 실린더와로드를 지지대와 함께 움직이게 설계되었습니다. 섀시의 각 블록에는 두 세트의 가이드와 드라이브가 있으며 각 실린더에는 하나의 지지대가 있습니다. 마지막으로 회전 기어는 전체 섀시 블록을 수직 축을 중심으로 전개합니다. 실험 장치의 전체 하부 구조는 전기 구동 장치를 기반으로합니다.
평평한 표면에서 Ortonog 보행기의 움직임은 다음과 같습니다. 이 기계는 8 개의 지지대 중 4 개 (섀시의 각 블록에서 하나씩)를 들어 올리고 수평 이동 메커니즘을 사용하여 앞으로 이동시킵니다. 또한 서포트가 표면에 떨어지고 사이클이 반복되지만 이번에는 다른 네 개의 서포트가 상승하고 앞으로 나아 간다. 이동하는 동안 Ortonog는 수직으로 변위 드라이브를 교대로 사용하며 수평 메커니즘은 거의 항상 작동합니다. 필요한 경우 회전 메커니즘이 활성화됩니다. 동기식 또는 분리형 작동으로 필요한 각도로 회전 할 수 있습니다. 디자인에서 알 수 있듯이 실험용 워커는 최소 반경으로 회전 할 수 있습니다.
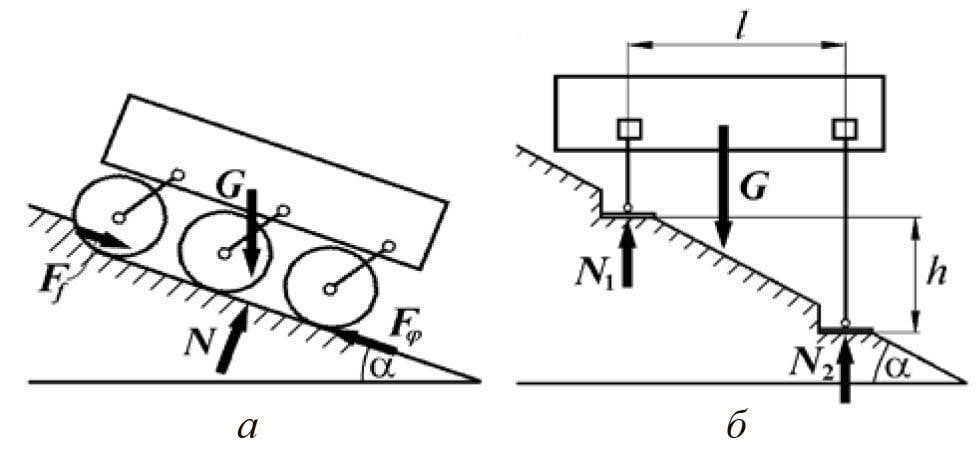
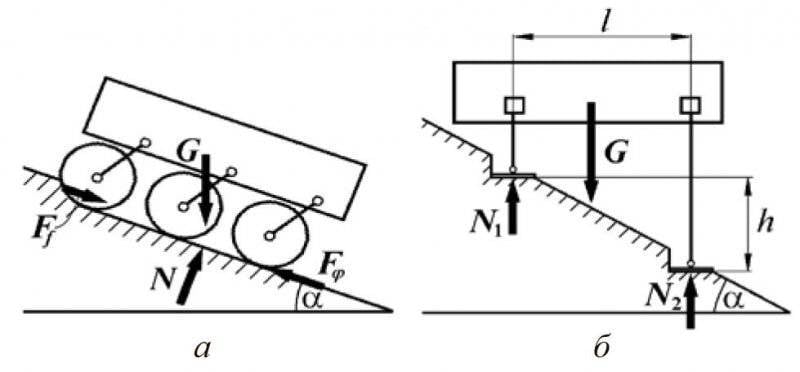
바퀴 달린 (a)과 걷기 (b) 차의 경사를 따라 움직입니다.
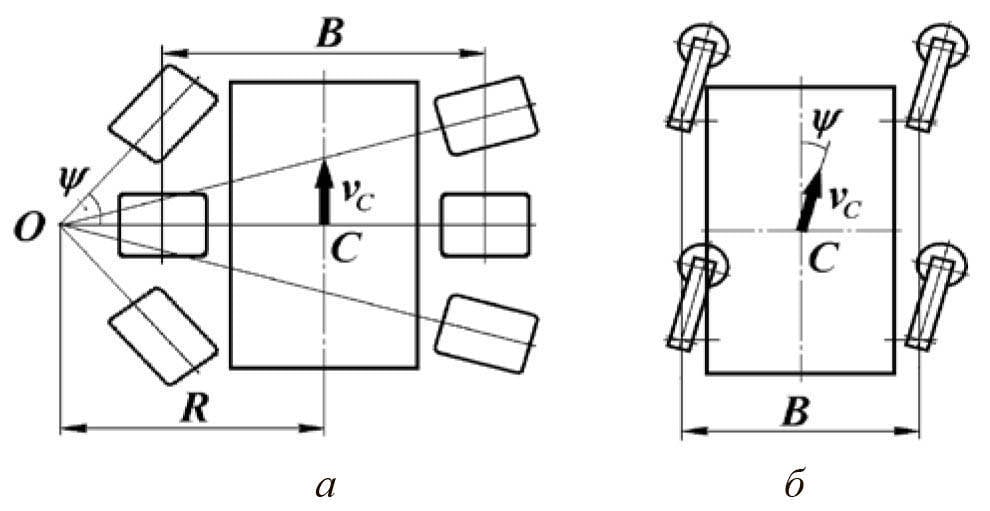
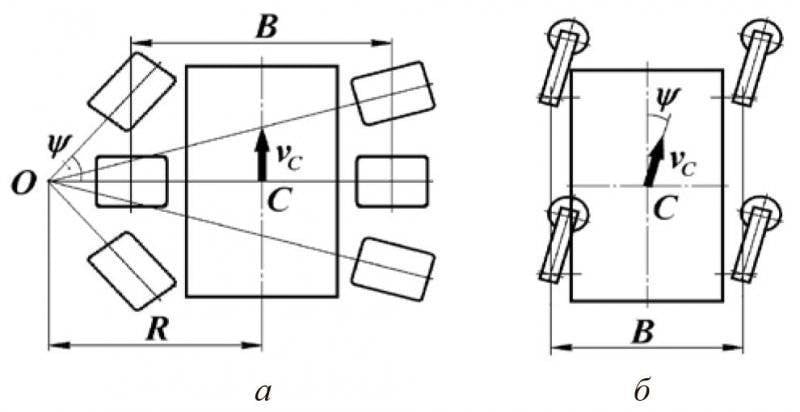
도 4 5. 바퀴가 달린 (a)과 걷기 (b) 차의 회전 방식
모든 주행 장치 메커니즘에는 작업에 대한 정보를 수집하는 센서가 장착되어 있습니다. 이 정보는 운전자의 운전자 콘솔로 전달되며 기계 작동을 조정할 수 있습니다. Ortonog 프로젝트에서 가장 큰 문제 중 하나는 운전자의 작업과 관련이 있습니다. 실습에서 알 수 있듯이 평평한면에서 운전할 때만 사람을 효과적으로 작동시킬 수 있습니다. 거친 지형 등으로 이동할 필요가있는 경우 운영자는 모든 메커니즘의 작업을 독립적으로 모니터하고 한 번에 또는 다른 필요한 알고리즘을 선택할 수 없습니다. 이와 관련하여, 기계의 기술적 부분과 동시에 자동화 된 컨트롤 컴플렉스가 개발되었습니다.
처음에는 다음과 같은 제어 방법을 사용하여 실험 장비를 테스트했습니다. 콤플렉스 운영자는 비디오 시스템에 의해 전송 된 정보에 따라 장치의 자율적 인 작동을 제어했습니다. 필요하다면, 우선, 장애물을 극복하면서 그는 보행 보조기의 작업을 방해하고 필요한 조정을했습니다. 압도적 인 다수의 기계 제어 작업은 사람의 개입없이 자동화에 의해 수행되었습니다. 이 경우, 실험 장치의 자동화는 시스템 작동에 대한 정보와 센서에서만 우주 공간에서 기계의 위치를 받았다. 비디오 신호를 사용하기위한 어떠한 조치도 취해지지 않았습니다. 기계를 제어하는 데 필요한 정보 수집에 대한 이러한 접근 방식의 결과는 전자 장치가 장애물을 우회 할 수없는 상황이었고 이로 인해 작업자가 개입해야했습니다.

이러한 테스트는 적응 형 워커 컨트롤을 설정하는 데 필요한 정보를 수집하는 데 도움이되었습니다. 특수 장비는 모든 운전자 행동과 센서 정보를 기록했으며 외부 및 내장 비디오 카메라의 신호도 기록했습니다. 앞으로는 기록 된 모든 데이터를 비교하고 메커니즘의 특정 작업에 해당하는 데이터 조각을 선택합니다. 이 정보는 "학습"자동화에 사용되었습니다. 얼핏보기에 컨트롤 시스템을 테스트하고 미세 조정 한 결과는 그리 높지 않습니다. 그러나 작년 말에 이미 Ortonog 장치는 작업자의 도움없이 독립적으로 기울여 진 경사면을 따라 움직이며 표면의 각도에 관계없이 필요한 몸체 위치를 유지할 수있었습니다. 또한이 장치는 독립적으로 멈추고 장애물을 발견하고 사용 가능한 하부 구조 메커니즘을 사용하여 장애의 크기를 결정했습니다.
Ortonog 장비는 아직 실제 사용에 적합한 워킹 머신의 기초가 될 수는 없지만, 그 전망은 이미 가시화되어 있습니다. 이 프로젝트의 진행 상황에 대한 정보에서 볼 수 있듯이 VolSTU와 TsKB "Titan"직원은 효율적인 보행기를 개발하고 좋은 전망을 가진 제어 알고리즘을 만들 수있었습니다. 공식 데이터에 따르면 Ortonog 자동차는 시간당 1,6 킬로미터를 초과하는 속도로 가속 할 수 있습니다. 지지대의 피치 길이 (45 cm)는 프레임의 수평 위치를 유지하면서 최대 40-45 cm까지 장애물을 극복 할 수 있습니다. 장치의 기울기와 관련된보다 복잡한 기동의 경우 장애물의 최대 높이가 80로 증가합니다 (교차 된 해자의 최대 폭은 0,9 미터입니다). 도보 프로펠러는 40 ° 상승을 극복 할 수 있습니다. 경사면을 가로 질러 움직일 때, Ortonog는 60 °에 대한 표면의 경사 각도에서 안정성을 유지합니다. 스위블 섀시 블록을 사용하면 장치가 종 방향 축에 대해 어떤 각도로든 동작 방향을 변경할 수 있습니다. 필요하다면, 옆으로 움직이고 반경 1 미터 이상으로 돌릴 수 있습니다.
Ortonog 프로젝트의 전망에 대해 이야기하는 것은 아직 이르다. 이 프로젝트와 그에 따라 제작 된 장치는 개발 조직의 향후 계획을 완전히 결정하는 순전히 실험적인 특성을 지니고 있습니다. 가까운 장래에 Volgograd Technical University의 "Theoretical Mechanics"부서와 Central Design Bureau "Titan"은 계속해서 추진력과 제어 시스템을 개발할 것입니다. 다양한 표면과 환경에서 워커의 작업을 보장 할 수있는 본격적인 알고리즘을 개발 한 후에야 다음 실험 샘플에서 작업을 시작할 수 있습니다. 다음 프로젝트는 기존 개발 및 실제 적용에 대한 적응을 개선하는 데 사용할 수 있습니다. 가까운 미래에 새로운 프로젝트가 나타날 가능성은 희박합니다. Ortonog 장비 작업을 완료하는 데 수 년이 걸릴 수 있습니다.
해당 사이트의 자료 :
http://cdbtitan.ru/
http://dtm.vstu.ru/
http://vpk.name/
정보