Kare Halvorsen, 새로운 로봇 MorpHex MKII 출시
로봇 공학으로 유명해진 유명한 노르웨이 엔지니어가 새로운 롤링을 도입했습니다. 로봇-트랜스포머, 꿈에서 직접 우리에게 찾아온 것 같았다. 노르웨이 "Kulibin"의 많은 로봇은 단순히 무섭다는 점에 유의해야합니다. 이것은 Bipedal Archer, 전갈 모양의 로봇 A-pod 및 개선 된 FireAnt 버전과 거미 모양의 로봇입니다. 그러나 무엇보다도 그들은 모두 기술적 사고의 놀라운 예입니다. Halvorsen의 새로운 MorpHex MKII 로봇은 많은 수의 섹션으로 나뉘며 각 섹션에는 두 개의 모터가 있습니다. 이 로봇은 바닥에서 구를 수 있습니다. 적절한 순간에 그는 패널을 열고 걸을 수 있는 다리로 바꿀 수 있습니다.
MorpHex MKII의 창시자는 그것이 가지고있는 팔다리의 수에 대해 이중 hexapod라고 불리는 장치를 설계하고 제작할 수 있었으며 그 수는 12에 도달했습니다. 노르웨이 출신의 디자이너는 새로운 모델에 MKII라는 명칭을 부여했는데 MKI라는 명칭의 전임 로봇과는 달리 동그라미에서만 움직일 수있는 새로운 로봇도 직선형으로 굴러 갈 수 있습니다. 설계자에 따르면, 로봇을 제어하는 것은 무선 조종 자동차를 운전하는 것과 동일합니다.
동시에 모델의 외부 경박함에도 불구하고 모든 Halvorsen 로봇은 우아하게 디자인되고 아름답고 현재 세계에서 가장 진보된 소형 로봇 중 하나입니다. 그의 모든 디자인은 분명히 자세히 살펴볼 가치가 있습니다. 특히 서로 싸우는 그의 디자인 로봇의 인터넷 동영상이 그렇습니다. 그의 드론 무리를 지어 모여서 서로 붙어 식민지를 형성할 수 있습니다. 그들을 보면 아마도 가까운 미래를 볼 수 있다는 것을 이해하게 될 것입니다.

노르웨이의 디자인 엔지니어 인 Kare Halvorsen (Kare Halvorsen)은 전문 커뮤니티 인 Trossen Robotics Community에서 Zenta라는 별명으로 등록되어 전세계 네트워크에서 명성을 얻었습니다. 동시에 로봇과 로봇의 제작은 취미 일뿐입니다. 그는 프로그래머블 아키텍처, 다양한 독창적 인 디자인 및 외관으로 로봇을 만들 수 있습니다. 이 경우, 노르웨이의 영감은 "자연 공학"에서 유래합니다. 아마추어 디자이너의 경우, Halvorsen은 그의 장치의 움직임에 대해 매우 매혹적인 사실감과 정확성을 얻을 수있었습니다.
오래 전부터 인터넷에 게재 된 최신 개발, 비디오 및 사진은 MorpHex입니다. 이름은 hexapod를 모핑하는 단어의 조합입니다 - "변형 가능한 육각형". 새로운 로봇은 구형의 몸체로 둘러싸인 여섯 발 장치입니다 (12 피트라고 부르는 것이 더 정확할 것입니다). 제작자의 계획은 로봇이 게처럼 움직 이도록 가르치는 것이 었습니다. 6 개의 팔다리가있는 로봇에서 쉽게 구로 변형되어 올바른 방향으로 움직일 수 있습니다. 한편, Halvorssen의 작업은 매우 단순한 것처럼 보이지만, 이러한 느낌은 디자인의 단순성 때문인 반면, 개발에는 기술 지식 및 엔지니어링 기술의 심각한 수하물이 필요합니다.
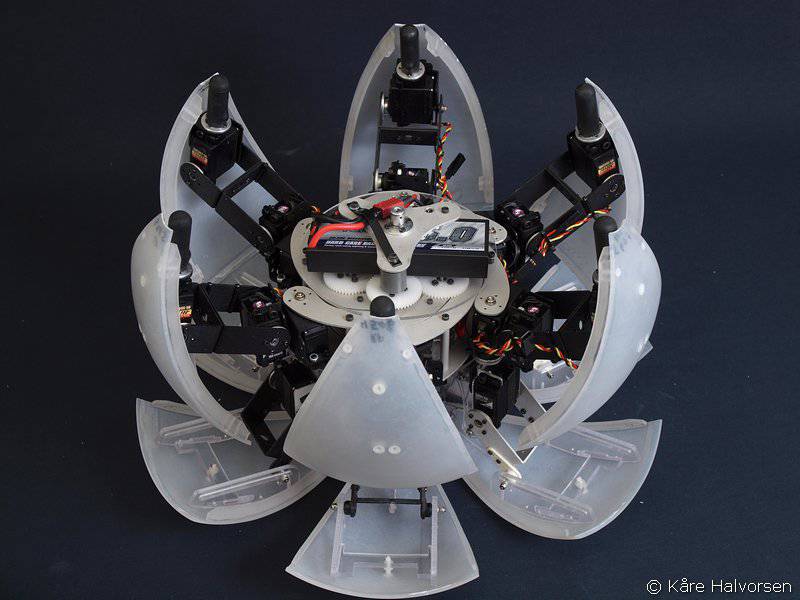
기술과 충만의 관점에서 볼 때 로봇은 전혀 단순하지 않습니다. 이 장치는 25 서보 모터를 포함하고 있으며, 각각은 개별 클러치 (12 드라이브의 5990 드라이브 및 Hitec 모델 13 드라이브의 5645 드라이브 사용)가 있습니다. 또한이 로봇에는 Basic Micro ARC-32 컨트롤러 카드, 2 mAh 전원이 장착 된 LiPo 5000S 배터리, XBee 라디오 모듈 및 8А의 Turnigy 컨트롤러가 내장되어 있습니다.
이 로봇을 보면서, 전에 보았던 것처럼 보이지만 컴퓨터 게임이나 공상 과학 영화의 캐릭터로 만 보입니다. 그러나 그들에게 제시된 디자인은 독특합니다. 로봇 메커니즘은 6 개의 팔다리 인 육각형과 변압기 장치의 기능을 성공적으로 결합합니다. 이 경우, Halvorsen의 자식은이 장치의 조건부 팔다리 수가 12에 이르기 때문에 이중 hexapod라고 더 정확하게 불릴 것입니다. 그러나 열린 상태에서는 6 만 이동에 사용됩니다.
저자의 다른 많은 작품 들과는 달리, 그의 새로운 로봇은 매우 친근 해 보입니다. 그의 손발의 도움으로 매우 빠른 움직임은 아니지만 특히 재미 있습니다. 로봇은 무선 조종 헬리콥터 또는 자동차를 제어하는 것과 유사한 리모컨으로 제어됩니다.
접힌 상태의 로봇은 구형 볼로 원주 주위뿐만 아니라 직선으로 상당히 큰 부분을 자신있게 극복 할 수 있습니다. 문제가없는 MorpHex MKII 로봇은 내부 메커니즘을 손상시키지 않고 사면에서 굴러 갈 수 있으며, 반 개방 상태에서 충분히 빠르게 움직이고 다른 방향으로 평평한 표면을 따라 움직일 수 있습니다. 이 장치의 로봇 메커니즘은 두 개의 서보 모터가있는 여러 섹션으로 구성되어 있으며 비슷한 디자인의 제품이 이미 펼쳐진 상태에 있기는 매우 어려운 영역을 극복 할 수 있습니다.

hexapods는 오랫동안 로봇 제작 분야에서 일하는 전문가들에게 사랑 받고 있습니다. 스파이더와 같은 기계는 작은 "포켓 (pocket)"로봇의 형태 일뿐만 아니라 내부에서 조종 될 수있는 거대한 구조의 형태로 개발되었습니다. 이 단계에서 Kare Halvorsen의 계획에는 새로운 로봇의 하드웨어 개정판이 포함되어 있는데, 그 이유는 로봇의 테스트 테스트 통과 중 한 서보 모터의 고장과 소프트웨어 구성 요소의 수정 때문이었습니다.
정보 출처 :
http://gearmix.ru/archives/10887
http://www.3dnews.ru/818913/#5353cc35b4182e2c4f8b456e
http://old.popmech.ru/blogs/post/4497-kare-halvorsen-i-ego-robotyi
정보