자동화물 차량은 전쟁터에서 군인의 노동을 용이하게합니다.
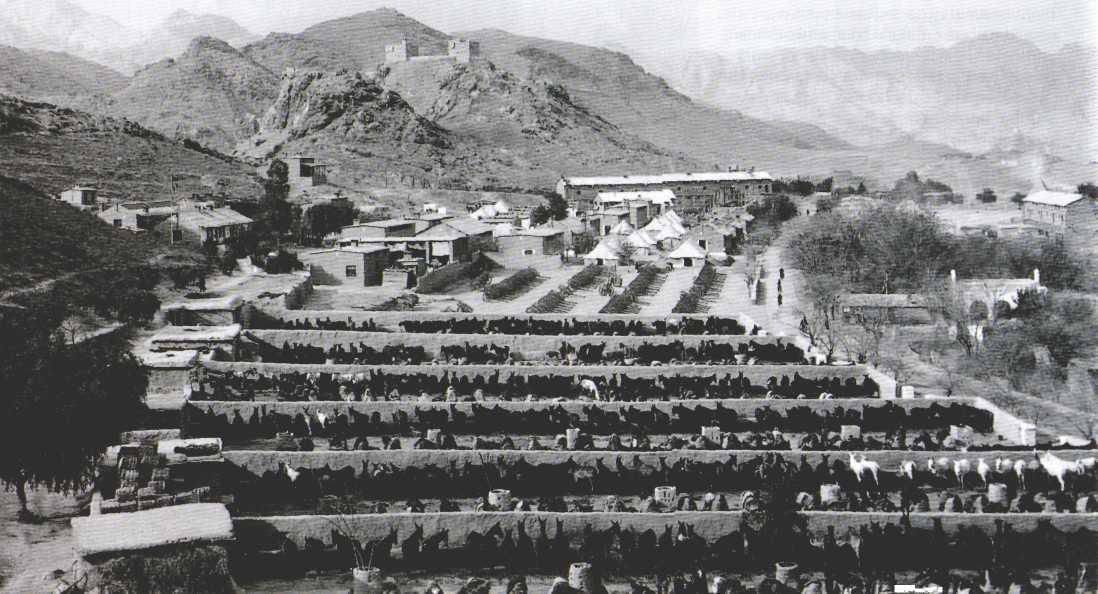
"당나귀 Eey의 일". 현대 파키스탄의 영토 내에있는 기지에있는 30-s의 한가운데있는 인도 서비스 부대의 짐 운반 회사의 노새.

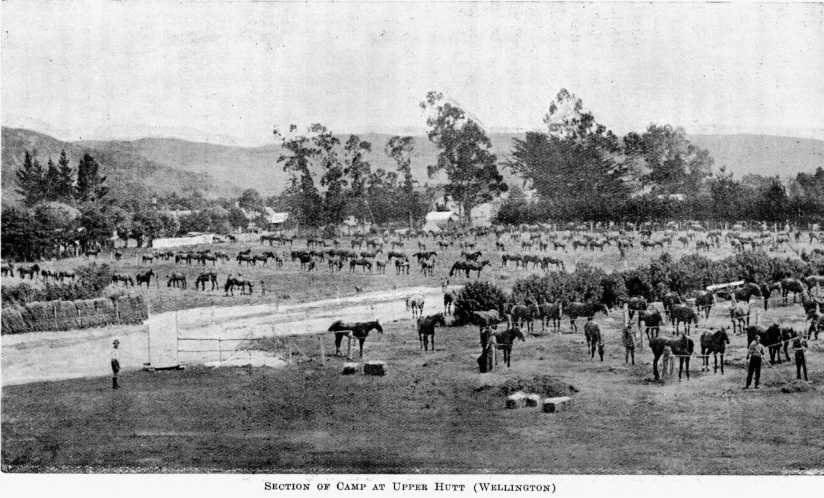
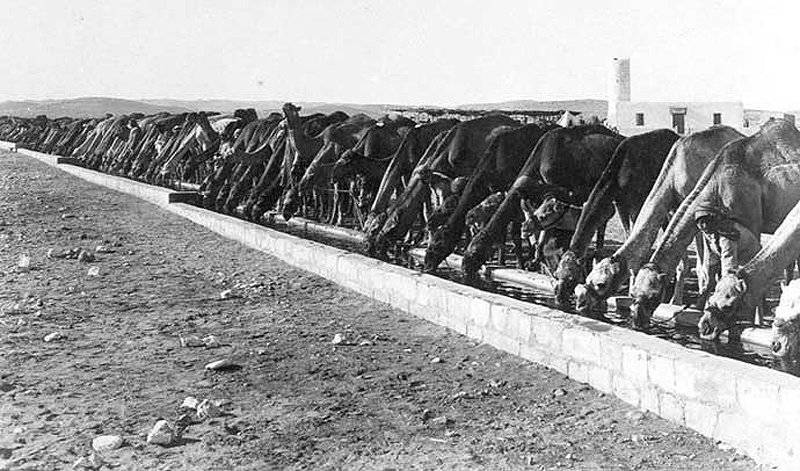
수세기 동안, 다양한 종과 아종의 짐승 동물들이 군사 작전에 사용되었습니다. 아카이브 사진에서 볼 수 있듯이 이것은 말과 노새와 낙타입니다.
오늘날 마력 수송은 느린 동물 이동, 예측 불가능한 환경 및 환경 조건에 대한 저렴한 비용과 놀라운 적응력에 대한 대가로 상당한 양의 물질적 인적 자원을 준비하는 반란자들 사이에서 주로 요구되고 있습니다.
세계 유수의 군대의 경우, 60-s를 시작으로 유인 헬리콥터 및 모든 지형 차량 공급이 전투 지역에서 필수적이었습니다. 물품을 운반하는 다른 방법보다 속도와 탑재량면에서 장점이 있지만 전투 작전, 비용, 가용성, 지형, 취약성 또는 사소한주의에 대한 물류에 항상 적합한 것은 아닙니다. 반대로, 자동 공급 시스템은 전투 부하의 부정적인 영향을 줄여야하기 때문에 지능화되고 있습니다.
현대의 비대칭적인 전장에서, 반란군은 예기치 못한 기계적, 비인간적 인 물류 수단, 예를 들어 포장 캐러밴을 기꺼이 사용하면서 예측할 수없는 가능성과 자신들의 큰 물류 부담을 인식합니다. 다른 한편으로는, 세계의 주요 군대는 역설적으로, 수백만 달러의 가치가있는 포유 동물의 기계적 유사체를 발견 할 수있는 무생물의 해결책을 탐구하는 것을 선호하면서, 시간을 되돌리려는 최소한의 의지가있는 것으로 보인다.
그러한 무생물 공급 시스템은 단순히 가정용으로 만 사용되는 "복잡하고 재미있는"기술과 관련하여 한 번 폐기 될 수 있습니다. 그러나 최근 수십 년 동안 로봇 기술의 사용이 방위 분야에서 점진적으로 확대되었으며 현재 무인 기계 시스템은 인적 자원의 필요성을 줄이고 재료 및 기술 공급 분야 (그리고 다른 분야에서도) 생명을 구할 수있는 잠재적 도구로 간주됩니다.
처음에는 이러한 시스템이 주로 군대를 보호하고 인적 자원을 절약하기 위해 명령 수준에서 관심을 갖게되었습니다. 그러나 현재 해산 된 군인이 예를 들어 아프가니스탄과 같은 극장에서 착용해야하는 대량의 전투 장비의 직접적인 부정적 영향에 대한 많은 경험이있는 사용자 수준에서도 관심이 커지고 있습니다. 전장에서 병사의 능력이 과도한 착용 가능 무게로 인해 저하되지 않아야한다면, 분명히 어떤 형태의 기계적 도움이 시급히 필요합니다.
지상 기반 자동 시스템은 적어도 분쟁 지역에서 생명을 구하고 공급 경로를 제공 할 수 있습니다. 추가로 제공되는 "근력"은 계획된 화력을 강화하고 최전선에서 보병 부대의 전투력을 강화할 수 있습니다. 무인 헬리콥터 형태의 동력 드라이브로 무인 공기 공급 시스템에 추가 할 수 있습니다. 예를 들어 유망화물 UAV (Cargo UAS) 용 해병대 또는 미 육군의 NLOS-T (비 시선 수송선) 미사일과 같은 수직 발사 컨테이너의 미사일 설계는 잠재적으로 다른 방식을 제공합니다 매복과 방향 지뢰를 "3 차원"의 사용을 통해 우회하십시오.
인적 자원과 국경 보안 요구 사항이 끊임없이 부족한 이스라엘 군대는 Guardium 자동 지상 차량 (ANA)의 형태로 무인 순찰 플랫폼을 처음으로 채택했습니다. 그것은 Elbit와 이스라엘 항공 우주 산업 (IAI)의 합작 회사 인 G-NIUS에 의해 개발되었습니다. Guardium의 목소리에는 순찰, 경로 확인, 호송 보안, 정찰 및 감시, 전투 작전 지원이 포함됩니다. 그 기본 형상에서, 차는 TomCar 4x4 SUV, 2,95 m 길이, 2,2 m 높이, 1,8 m 넓이 및 300 kg 용량을 기본으로합니다. 반자동 모드에서의 최대 속도는 50 km / h입니다.
9 월 2009에서 G-NIUS는 물류 최적화 된 Guardium-LS 확장 버전을 선보였습니다. TM57 섀시를 기반으로하며 영국군이 Springer라는 회사 수준의 주거 플랫폼으로 채택한 기계와 유사합니다. Guardium-LS의 길이는 3,42 m이며, 최대 1,2 톤 (견인화물 포함)의 운반 능력이 향상되었습니다. 제어 모드 또는 자동 모드에서 작동 할 수 있으며, Elbitra / Elisra EJAB 탄두 머플러를 포함하여 경비 버전의 이전 모델과 동일한 시스템 세트를 갖추고 있습니다. 열 화상 카메라, 주간 CCD 카메라 및 안구 안전 레이저 거리 측정기로 구성된 광 전자 스테이션 IAI Tamam Mini-POP; GPS 네비게이션 시스템; 장애를 피하기위한 레이저 에코 사운 더 (LIDAR); 입체 카메라. 그는 또한 호송에있는 사람이나 다른 차량의 지시를 자동으로 따르도록하는 "추적"센서를 가지고 있습니다.


IAI의 "Field Porter"Rex는 200 kg의 장비를 운반하도록 설계되었으며 연료를 보급하지 않고 3 일 동안 작동 할 수 있습니다.
적대 행위 직접 지원
G-NIUS 계열의 전투 작전의 또 다른 잠재적 조력자는 AvantGuard이며 현재 이스라엘 육군과도 근무 중입니다. Guardium 제어 기술을 사용하지만이 플랫폼은 캐나다에서 추적되는 울버린 추적 차량을 수정 한 것입니다. 더 작고 Dumur TAGS (전술적 부유 지상 지원 플랫폼)으로 지정됩니다. 4 륜 자동차에는 4 기통 Kubota V3800DI-T 디젤 엔진이 100 hp로 정해져 있으며 19 km / h의 최대 속도를 발휘하며 반자동 모드로 작동 할 수도 있고 착용 가능한 제어판에서 제어 할 수도 있습니다. 무게는 1746 kg이며, 1088 kg의 적재 하중은 상처 입히기 및 기타 물류 작업을 피할 수 있습니다.
ANA의 새로운 모델은 2009년 3월 IAI의 Lahav Division에서 선보인 "필드 포터" Rex입니다. 자동 모드에서 10명에서 200명의 병사를 동반하는 소형 로봇 플랫폼을 기반으로 하며 연료 보급 없이 최대 XNUMX일 동안 XNUMXkg의 장비와 보급품을 운반할 수 있습니다. 회사에 따르면 로봇 차량은 IAI가 개발하고 특허를 받은 기술을 사용하면서 미리 정해진 거리에서 선두 병사를 따라간다. '멈추다', '운전하다', '따라가다' 등의 간단한 명령으로 병사가 조종한다. 로봇 그들의 주요 작업에서 산만하지 않고. 이러한 방식으로 로봇을 제어하면 직관적인 상호 작용이 가능하고 제품을 짧은 시간 안에 현장에 신속하게 통합할 수 있습니다.” Rex의 크기는 50x80x200cm, 최고 속도는 12km/h, 회전 반경은 1m, 최대 등판 능력은 30도입니다.
송곳니 패밀리와의 유사점은 완전히 다른 구현이지만, 미국 회사 인 Boston Dynamics가 개발 한 4 다리 장치에서 볼 수 있습니다. 이 프로젝트는 미국 국방부 선진 연구 개발국 (DARPA)의 지원을 받아 해병대와 군대의 참여로 이루어졌습니다. Big-Dog는 109 kg, 높이 1 m, 길이 1,1 m 및 너비 0,3 m의 무게를 가진 로봇입니다.이 프로토 타입은베이스 플레이트와 삼각대가 달린 81-mm 모르타르를 가지고있는 도보 순찰 장치의 보조 장치로 Fort Benning에서 평가되었습니다. 모든 유형의 지형에 대한이 프로토 타입의 일반적인 하중은 50 kg (60 도의 위아래)이지만 154 kg의 최대치는 평평한 표면에 표시됩니다.
이동 모드 BigDog는 속도 0,2 m / s, 고속 5,6 km / h, 7 km / h 또는 11 km / h를 초과 할 수있는 실험실에서의 "점프 보행"을 크롤링합니다. 주요 추진력은 수냉식 동력 15 hp로 푸시 - 풀 (pull-pull)하며, 오일 펌프를 구동하고 차례로 각 레그 당 4 개의 액츄에이터를 구동합니다. BigDog는 자세와 가속도를 측정하기위한 관성 센서와 다리 액츄에이터의 움직임과 힘을 측정하기위한 관절 센서를 포함한 20 센서에 대해 설명합니다. 모든 센서는 온보드 컴퓨터로 모니터링됩니다.
또한 컴퓨터는 원격 운영자로부터 수신 한 IP 라디오 신호를 처리합니다. 그는 BigDog에게 필요한 지시 및 속도와 정지 / 시작 명령, 웅크 리고 걷기, 빨리 달려가 천천히 실행합니다. Jet Propulsion Laboratory에서 개발 한 스테레오 비디오 시스템은 컴퓨터와 소프트웨어라는 두 개의 스테레오 카메라로 구성됩니다. 일반적으로 로봇의 정면에있는 서페이스의 모양을 결정하고 명확한 경로를 인식합니다. 또한 장치 BigDog에 자동으로 사람의 지시에 따라 LIDAR를 설치했습니다.


Guardium-LS는 ANA G-NIUS Guardium의 선택적으로 사람이 거주하는 버전으로 일반 제어, 시각화 및 전자식 억제 시스템을 갖추고 있습니다. 미니 POP 광전자 스테이션이 캐빈 상단에 설치되어 있으며 그 뒤에는 EJAB 폭발성 소음기의 다중 요소 원형 안테나가 있습니다

FortBunning 보병 센터에서 패트롤 팀의 캐리어로 표시된 BigDog 네 다리 로봇은 자동으로 지정된 그룹 멤버를 따릅니다.


Boston Dynamics / DARPA의 4 다리 BigDog 로봇이 눈 덮힌 경사면을 극복했습니다.
크로스 컨트리 워크
초기 단계에서 BigDog는 10 시간 동안 거친 지형에서 2,5 km를 걸을 수 있음을 입증했지만 보스톤 다이내믹은 현재 로봇이 훨씬 더 어려운 지형을 극복하고 전복 안정성이 감소하도록 설계 제약 조건을 확장하기 위해 노력하고 있습니다 노이즈 서명 및 운영자 의존성 감소. BigDog가 후원하는 DARPA의 감독하에 LS3 프로그램 (Legged Squad Support System)의 현재 발표 된 목표는 400 시간 동안 181 파운드 (24 kg)를 휴대 할 수있는 능력입니다.
[미디어=http://www.youtube.com/watch?v=OuGZjsKQxbI]
해병대 지휘관과 DARPA 국장에게 LS3화물을 운반하기위한 로봇 식 도보 시스템 데모
John Deere가 iRobot과 공동으로 개발 한 R-Gator 조달 시스템은 수동 또는 자동 모드로 작동 할 수 있습니다. 차는 25 마력을 가진 3 기통 디젤 엔진을 갖추고 있으며, 6 륜 R-Gator는 20 km를 극복하기에 충분한 500-L 연료 탱크를 가지고 있습니다. 변속기는 무단계이며이 장치는 수동 모드에서 56 km / h의 최대 속도를, 원격 또는 자동 모드에서는 0-8 km / h를 발전시킵니다.
기계의 치수는 3,08x1,65x2,13 m, 자체 중량 861 kg, 화물칸 0,4 м3 및 페이로드 453 kg (견인 680 kg)이 있습니다. R-Gator의 표준 비디오 시스템은 92,5 도의 시야와 고정 된 전후 (구동 용) 컬러 카메라와 가로로 25도 및 세로 12도 회전하는 배율 (440x 광학 / 240x 디지털) 카메라로 안정적인 파노라마 뷰를 포함합니다. 자동 초점과 감도 0.2 Lux F 2.0가 있습니다. 이 카메라는 줌 기능이있는 주간 / 야간 광 / 전자 / 적외선 카메라로 교체 할 수 있습니다.
기본 R-Gator 통신 키트 (900 MHz, 2,4 GHz 또는 4,9 GHz 주파수 옵션 포함)는 최소 300 m 제어 범위를 가지며 Windows 또는 휴대용 제어 장치를 기반으로하는 운영 업체의 노트북에 연결됩니다. NavCom Technology의 로봇 GPS 위치 시스템은 관성 시스템과 결합하여 정확도를 향상시킬 수 있습니다. LIDAR 후면 센서 1 개와 LIDAR 전면 뷰 센서 2 개가있어 원격 및 자동 모드에서 20 거리의 장애물을 감지 할 수 있습니다.
록히드 마틴 미사일 (Lockheed Martin Missiles)과 ANA MULE (Multifunction Utility / Logistics and Equipment) 소방 통제 시스템이 수행 한 폐쇄 프로그램에 대해 간략하게 기억할 필요가 있습니다. 그것은 원래 폐지 된 육군 프로그램 FCS (Future Combat Systems)의 일부로 간주되는 ANA 계열의 시스템의 "기초"중 하나였습니다.
이 차는 3 가지 버전으로 제조 될 것이라고 추측되었습니다 : 광전자 및 적외선 센서가 장착 된 공격등 ARV-AL (무장 로봇 차량 - 돌격 등) 및 타겟팅 용 레이저 거리계 / 포인터; Mindle - CM (Countermine-anti-mine)은 원격 지뢰 탐지 시스템 GSTAM1DS (지상 대기 지뢰 탐지 시스템)가 장착되어있어 대전차 지뢰를 탐지 및 중화하고 해제 된 통로를 표시 할 수있을뿐 아니라 즉석 폭발 장치 (IED) 및 기타 작업을 제한적으로 탐지 할 수 있습니다 미발행 무기의 처분; 및 MULE-T (운송), 862 kg (달리 2 개의 구획) 장비를 운반 할 수 있습니다. 세 가지 옵션 모두 반자동 항법 및 우회 장애물 용으로 설계된 General Dynamics Robotics Systems과 동일한 자율 항법 시스템을 갖추고 있어야했습니다.
MULE 장치는 기갑 부대를 지원하도록 특별히 설계되었으며 승급 속도 (고속도로 최대 속도 65 km / h)를가집니다. 원칙적으로 각 소대는 2 개의 룰을 가졌으나이 개념을 개정하고 대대적 인 수준에서 중앙 통제를 정의했습니다.
ANA MULE의 총 톤수는 2,26입니다. 메인 프레임은 BAE Systems의 전동기가 설치된 허브에 6 개의 독립적 인 스프링 장착 경첩 바퀴로지지되었습니다. 이 결합 된 디젤 - 전기 시스템은 HP 135 파워를 갖춘 Thielert 디젤 엔진에 의해 구동되었습니다.
지부 지원 기계
동시에, 록히드 마틴 (Lockheed Martin)은 SMSS 지원 시스템 (분대 선교 지원 시스템)에 종사하여 유인 및 자동 모드의 운송 및 물류를 필요로하는 지사의 긴급한 필요를 충족시키기위한 독립적 인 연구 프로젝트로 자금을 지원했습니다 응답. 1,8 톤을 사용하는이 플랫폼 6x6는 거친 지형에서 500 km 및 320 km의 순항 범위를 제공합니다. 이 기계는 선상에있는 운전자 또는 운전자가 원격으로 제어 할 수 있습니다 ( "통제 된 자치"). 또는 자율적으로 작동 할 수 있습니다. 기계의 적재 된 적재 하중은 454 kg 이상이며, 588 mm 스테이지 및 0,7 폭의 트 랜을 극복 할 수 있습니다. 전 부하에서 순항 속도는 고속도로에서 160 km이고 도로에서 80입니다.
그 특징 중 하나는 디젤 엔진에 의해 구동되고 부서 직원의 개인 라디오 방송국의 배터리를 충전하는 데 사용할 수있는 충전기가 있다는 것입니다. SMSS는 작은 ANA와 부상자를 대피시키기 위해 2 명의 들것을 휴대 할 수 있습니다. 뒤쪽에있는 앞 윈치와 부착 지점은 자동 당기기를 위해 설계되었습니다.
SMSS Block 0 프로토 타입은 8 월 2009의 Fort Benning에있는 Army Infantry Center에서 테스트를 거친 후 1 블록의 프로토 타입 중 첫 번째 두 가지를 제조했습니다. UH-60L 헬리콥터의 서스펜션에서의 운반을위한 부착 지점, 개선 된 노이즈 서명 제어 및 신뢰성은 물론 자율 수준을 높이기위한 업그레이드 된 센서 세트가 있습니다. 2011 중반에는 필드 테스트 목적으로 2 개의 SMSS 시스템이 아프가니스탄에 배치되어 운영 강도가 확인되었습니다.
워싱톤에있는 AUSA 2009에서, 록히드 마틴 (Lockheed Martin)은 SMSS에 HULC (Human Universal Load Carrying System) 운반 시스템을 보여주었습니다. 다양한 작업에 추가하여 동력 드라이브가있는이 외골격은 SMSS의 유용한 수단으로 간주됩니다. 즉, 지형이 차량에서 통과 할 수없는 지점 인 '마지막 마일'에서 상품을 내리는 수단으로 간주됩니다. 체중이 13,6 kg 일 때, HULC는 주인이 91 kg까지의 하중을 실을 수 있도록 도와줍니다.
ANA 기술을 사용하는 실용적인 접근 방식은 DARPA가 자금을 지원 한 TerraMax 프로젝트에 대해 Oshkosh Defense에 의해 채택되었습니다. 현대적인 전투 지역에서 일일 지원 칼럼을 수행하는 데 필요한 사람들의 수를 줄이기 위해 표준 병력 지원 차량과 원격 제어 및 자율 기능을 결합합니다.
TerraMax 팀에서 Oshkosh는 장비 통합, 모델링, 전선 관리, 제어 지점 추적 및 전반적인 레이아웃을 담당합니다. Teledyne Scientific Company는 작업 및 경로 계획 및 높은 수준의 차량 제어를 수행하는 데 매우 효율적인 알고리즘을 제공하며 University of Parma는 다 방향 차량 비전 시스템 (MDV-VS)을 개발하고 있습니다. Ibeo Automobile Sensor는 Ibeo의 Alasca XT 센서를 사용하여 특수 LIDAR 시스템을 개발하고 Auburn University는 GPS / IMU 패키지 (글로벌 내비게이션 및 위치 측정 시스템 및 관성 측정 장치)를 통합하고 장치의 제어 시스템을 지원합니다.
TerraMax는 Oshkosh의 4x4 군용 MTVR 트럭의 변형이며, TAK-4 독립 서스펜션, 6,9 m 길이, 2,49 m 폭, 2 m 높이 및 11000 kg 무게의 5 톤을 탑재하고 있습니다. 121 리터 용량과 hp 11,9 동력을 갖춘 6 기통, 4 행정, 터보 차저 형 Caterpillar C-425 디젤 엔진이 장착되어있어 105 km / h의 최대 속도에 도달 할 수 있습니다. 일련의 장치로 개발 된 장치의 자율 제어 시스템에는 카메라가있는 비디오 시스템, LIDAR 시스템; GPS / IMU 네비게이션 시스템; Oshkosh Command Zone을 다중화하는 자동화 된 전자 시스템; 네비게이션 컴퓨터는 센서 데이터,지도 데이터 관리, 실시간 경로 계획 및 고급 제어를 요약합니다. CANBus 제어 브레이크, 조향, 엔진 및 변속기가 포함됩니다.



Lockheed Martin 8 월 2009의 Fort Benning 훈련 캠프에서 테스트 중 SMSS. SMSS는 분리 된 부서의 기능을 수행합니다.

록히드 마틴 (Lockheed Martin) 배터리로 작동하는 외골격은 착용자가 200 파운드 (91 kg)를 ANA가 접근 할 수없는 장소까지 운반 할 수있게합니다. 평평한 표면에서의 던지기 속도는 16 km / h입니다.
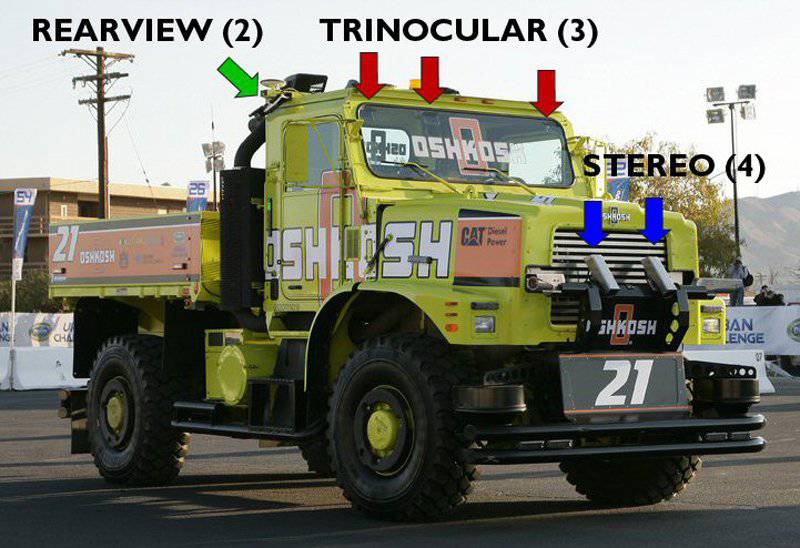

Oshkosh MTVR TerraMax 무인 트럭은 도시 챌린지 (Urban Challenge) 테스트에서 도로 교차점을지나 호송 차량이옵니다. 이러한 기술은 전투 지원, 생명 구해 및 인력 절감에 사용될 수 있습니다.
호송 가이드
Oshkosh는 도시 챌린지 (Urban Challenge)를 포함한 다양한 DARPA 후원 로봇 식 차량 경진 대회에 참여함으로써 테란 맥스 (TerraMax) 기술을 수송 기둥에 적용하기 위해 미 육군의 TARDEC 장갑 연구 센터와 공동 연구 개발 협약 (CRADA)을 체결했습니다. CRADA의 3 년 계약에 따라 CAST 모방 시스템 (Convoy Active Safety Technology)이 TerraMax 시스템에 설치됩니다. 그것은 convoys의 경로 지시자 역할을하고, 뒤에 오는 자동 차량에 대한 경로 정보를 사람, 동물 및 다른 차량 사이에서 안전하게 작동해야하는 동안 전달하기위한 것입니다. 이어서, 3 월에 2009라는 회사 인 Oshkosh는 표면 시스템 연구 센터 оружия 해군은 TerraMax를 다양한 전투 임무 시나리오에서 MTVR 로봇 트럭 (R-MTVR)으로 평가하고 있습니다.
비교적 최근에 Vecna Robotics는 ANA Porter와 함께 시장에 출현했습니다. 개인화물 운송 시스템과 표준 병력 차량 간의 교차로로서 90에서 272 kg까지 무게의 하중을 이동시키기위한 것입니다. 기본 단위 4x4의 질량은 90 kg, 길이 1,21 m, 폭 0,76 m 및 높이 0,71 m입니다.
16 km / h 이상의 최대 속도로 다양한 물품을 수송하도록 구성 될 수 있으며 리튬 폴리머 배터리로 구동되는 지형에 따라 최대 주행 거리는 50 km입니다. 배터리는 선택 사양 인 태양 광 충전 장치 또는 발전기에서 현장에서 충전됩니다. 최대 제어 거리는 시선 (32 km까지)에 따라 다릅니다.
현재 실험 모델의 형태로 존재하는 포터에는 반자동 제어 키트가 제공되며, 이는화물 플러스 "팔로우"및 "에스코트"모드 또는 GPS 내비게이션, 경로 계획 및 자율 제어 키트와의 균형을 맞추기 위해 공간의 위치를 제어함으로써 구별됩니다 지형 매핑. 다른 업무 중에서도 여러 ANA 포터를 자치 기둥에 사용하거나 공동 경계 감시를 수행 할 수 있습니다.
화물 UAV화물 해상 운송을위한 해병대 프로그램은 새로운 세대의 무인 공중 전달 플랫폼의 기능을 찾는 사례입니다. 해병대 조사 연구실 (MCWL)은 지난 2 월 2010에 대한 올해의 2011에 대해 4 월에 수요를 발표했다.이 XNUMX은 먼 지역에서 운영 할 수있는화물 UAV를 대상으로한다.
MCWL 연구소의 공중 전투 구성 팀 프로젝트 관리자 인 Amanda Mauri 대위는화물 UAV에 대한 요구 사항은 주로 아프가니스탄의 전투 경험에 의해 결정되었다고 전했다. MCWL 실험실은 전투 개발 센터 및 다른 군단 대행사와 협력하여 아프가니스탄의 회사 규모 단위가 하루 안에 처리 할 수있는 매장량을 결정하고 10000-20000 파운드의화물을 산출했습니다. "거리에 관해서는, 150 마일 루트는 왕복이며, 전진 기지에서부터 전진 기지까지의 거리가 어느 정도인지에 따라 결정되지만 분명히 지속적으로 변화하고 있습니다."

Vecna Robotics의 ANA Porter의 컴퓨터 생성 이미지. 이제 프로토 타입 단계를 통과했습니다.
결과적으로, 시연 단계에서 MCWL이 주장한 기능은 10000 시간 동안 20000 파운드 이상의화물 (실제로는 24 파운드)을 150 해리 이상으로 앞뒤로 전달하는 것이 었습니다. 전체화물 키트의 가장 작은 요소는 최소한 표준 목재 팔레트 (48x40x67 인치)와 같아야하며 750 파운드의 실제 중량으로 적어도 1000 파운드 이상이어야합니다. 직접 전방 시선을 넘어 전방베이스 또는 비포장 도로에서 독립적으로 이륙 할 수 있어야하며, 또한 터미널에서 원격으로 제어 할 수 있어야합니다. 화물은 최소 10 미터의 정확도로 인도되어야합니다.
플랫폼의 성능 특성은 70 피트의 높이에서 130 노트 (15000 km / h)의 속도로 최대 부하에서 비행하고 최대 12000 피트까지 높이를 가리킬 수있는 기능입니다. UAV는 또한 배치 지역의 기존 공중 제어 기관과 상호 작용해야하며, 무선 주파수 제어는 배치 영역의 주파수 요구 사항과 호환되어야합니다.
8 월, MCWL 연구소의 2009는화물 UAV 대회를 위해 Lockheed Martin / Kaman K-MAX 시스템과 Boeing A160T Hummingbird 시스템의 두 가지 응용 프로그램을 선택했다고 발표했습니다. Northrop Grumman의 MQ-8B Fire Scout UAV는 제외되었습니다.
Lockheed Martin과 Kaman은 3 월 2007에서 K-MAX 팀을 결성했습니다. 그녀는 록히드 마틴 (Lockheed Martin) UAV 제어 시스템을 건설 및 목공 산업에 널리 배포되는 상용 중형 K-MAX 헬리콥터에 통합했습니다.


이스라엘 항공의 AirMule은 밀폐 된 공간에서 작업 할 수있는 혁신적인 내부 추진 시스템을 갖추고 있습니다.


160 파운드에화물 곤돌라와 A1000T Hummingbird
K-MAX 디자인은 반대 방향으로 회전하는 2 개의 중첩하는 프로펠러로 구분됩니다. 이는 스티어링 나사가 필요없고 리프트가 증가하며 설치 공간이 줄어 듭니다. Kaman은 이것이 Honeywell T1800-53 가스 터빈 엔진에 의해 생산 된 모든 17 HP를 주 스크류로 향하게하여 리프트 력을 증가시킵니다. 3109 kg의 최대 하중을 수송 할 때, K-MAX는 80 항해 거리의 범위에서 214 노드의 속도로 비행 할 수 있습니다. 하중없이, 속도는 100 노드, 267 항해 거리의 범위입니다. 본질적으로 수정 된 유인 플랫폼이기 때문에, K-MAX는 탑재 된 제어 장치가 남아 있기 때문에 필요한 경우 유인 할 수 있습니다.
Rotorcraft 프로그램의 부사장 인 Jeff Bentle은 "팀은 해병의 요구 사항을 충족시키는 데 더 중점을 두 었으며 플랫폼을 개발하는 다른 방법을 모색하는 데 집중하지 않았습니다. 그는이 그룹이 항공기 개조 작업을하고 있으며 직접 및 간접 비전 통신 시스템, 전술 데이터 채널, 비행 통제 시스템 및 여분의 INS / GPS 시스템 (이중화 포함)을 포함한 여러 시스템을 추가했다고 설명했다.
사용 된 재료 :
www.janes.com
www.vecna.com
www.ir.elbitsystems.com
www.bostondynamics.com
www.lockheedmartin.com
www.oshkoshdefense.com
www.darpa.mil
www.aeronautics-sys.com
정보