Project Boeing-Sikorsky RAH-66 코만치 스카우팅 및 쇼크 헬리콥터 폐쇄
현대 군사 기술의 창조는 복잡하고 길고 값 비싼 사업입니다. 그러나 현대적인 개발 및 설계 방법으로 위험을 줄일 수 있으므로 대부분의 최근 프로젝트가 완전히 구현되었습니다. 그러나 예외가 있습니다. 10 년 전 미 국방부는 유망한 정찰과 공격 헬리콥터 보잉시 코르 스키 RAH-66 Comanche 프로젝트에 대한 모든 작업을 중단하기로 결정했습니다. 이 프로젝트는 오랜 기간 동안 개발되었으며 펜타곤에 수십억 달러의 비용이 듭니다. 그러나 현재 상황과 전망을 분석 한 후에는 닫혔습니다.

RAH-66 헬리콥터의 출현을위한 주요 전제 조건은 기존 미국 헬리콥터 건쉽의 기능을 분석 한 올해의 1982 보고서입니다. 대부분의 무장 차량은 바르샤바 조약과의 무력 충돌 상황에서 배정 된 전투 임무를 효과적으로 수행 할 수 없다고 밝혔다. 미국 군대는 적의 공중 방어를 극복하고 표적을 찾고 파괴 할 수있는 새로운 차량이 필요했습니다.
1983 년,보고가 발표 된 지 불과 몇 달 후 펜타곤은 LHX 프로그램 (Light Helicopter Experimental)의 출시를 시작했습니다.이 목적은 단일 디자인을 기반으로 두 개의 헬리콥터를 만드는 것이 었습니다. 그 중 하나 (LHX-SCAT라고 함)는 정찰과 파업을 목적으로했으며 두 번째 (LHX-UTIL)는 다목적 기계로 간주되었습니다.
새로운 프로그램은 즉시 항공기 제조업체의 관심을 끌었습니다. 경쟁에서 우승 한 이후로 장비 공급을위한 최대 규모의 계약에 서명했기 때문입니다. 공군과 해병대를 제외한 지상군 만이 수천 개의 새로운 헬리콥터를 주문할 계획이었습니다. 그것은 AH-5, OH-2900 및 OH-1 헬리콥터를 대체 할 LHX-SCAT 6 헬리콥터를 구입할 계획이었으며, 더 이상 사용되지 않는 다목적 UH-58을 대체하기 위해 더 많은 2 LHX-UTIL 천명을 계획했습니다.
그럼에도 불구하고 커다란 계약을 맺을 전망은 군대의 요구에 따라 복잡했다. 군대는 독특한 특성을 가진 헬리콥터를 얻고 자했으며, 그 개발에는 특별한 노력이 필요할 것입니다. 레이더, 적외선 및 음향 범위에서 가능한 한 낮은 가시성을 보장하는 것이 필요했습니다. 또한 헬리콥터의 최대 속도는 400-450 km / h에 도달하여 당시의 모든 기존 기계의 성능을 크게 뛰어 넘었습니다. LHX-SCAT 정찰 및 공격 헬리콥터에는 단일 선실, 특수 장비 세트 및 3800 kg 주문의 이륙 중량이 있어야합니다. LHX-UTIL은 여객 6 명 또는화물 600 kg을 운반하도록 설계되었으며, 조종사 2 명에 의해 통제되고 SCAT 수정보다 약간 더 커야했습니다.

미국의 4 대 항공기 제조 회사가 LHX 경쟁 입찰을 제출했습니다. Bell, Boeing, Hughes 및 Sikorsky는 유망한 기계를 개발하고자하는 열망을 표했습니다. 이 단체의 전문가들은 헬리콥터 개발 전망에 대한 자신의 견해를 가지고 있었기 때문에 완전히 다른 모습의 여러 프로젝트가 출현하게되었습니다. 예를 들어, 회사 인 "Sikorsky"는 동축 베어링 나사와 꼬리를 밀고있는 자동차를 제공했습니다. 그런 배열은 가장 가능한 가능한 비행 속도를 보장하기로되어 있었다. 시코 르 스키 (Sikorsky) 사가 미래에도 유사한 아이디어를 계속 개발해 왔으며 현재 유사한 프로젝트 인 S-97에 종사하고 있음이 주목할 만합니다.
예비 프로젝트를 개발하는 동안 필요한 특성을 가진 LHX 헬리콥터를 만드는 것은 어려운 작업 인 것으로 밝혀졌으며, 이는 경쟁자가 강제로 합류하게 된 이유입니다. 보잉 헬리콥터 부서는 Sikorsky와의 작업을 시작했으며 Bell 전문가는 이번에 휴즈 (Hughes)가 포함 된 McDonnell Douglas의 동료들과 협력하기 시작했습니다. 1988 가을에,이 두 컨소시엄은 작업 계속을위한 계약을 받았습니다.
이 단계의 임무는 기계의 이륙 중량 및 비용의 설정 값을 유지하면서 요구 사항을 충족 할 가능성을 결정하는 것이 었습니다. 또한 헬리콥터의 레이아웃을 점검하고 전자 장비의 통합 작업을 수행했습니다. 이 단계에서 고객이 유망한 기술에 대한 요구 사항을 완화해야한다는 것이 분명해졌습니다. 최대 비행 속도를 350 km / h 이상으로 제공하는 것은 기술적 인 관점에서 볼 때 매우 어려웠습니다. 또한, 연구 결과에 따르면 이러한 속도로 저고도 비행은 고도의 자격을 갖춘 조종사 만 이용할 수 있습니다.
군대는 최대 속도에 대한 요구 사항을 변경하고 다용도 헬리콥터 LHX-UTIL 개발을 취소했습니다. 80 년대 중반 이후, LHX 프로그램을위한 자금은 꾸준히 감소하고 있으며, 몇 번이나 작업을 중단하라는 제안이있었습니다. 그럼에도 불구하고 프로그램은 계속되었지만 축소되었습니다. 제한된 재정적 능력으로 인해, 펜타곤과 참여하는 회사들은 기술 솔루션을 개발하는 새로운 방법을 적용해야했습니다. 대부분의 아이디어와 제안은 컴퓨터 시뮬레이션을 사용하여 테스트되었습니다. 일부 유닛과 어셈블리는 비행 실험실에서 테스트되었습니다.
1991의 봄까지, 군대는 새로운 헬리콥터를 개발할 사람을 결정한 다음 대량 생산을 시작했습니다. 두 가지 제안 된 프로젝트 중 보잉 -시 코르 스키 (Boeing-Sikorsky) 노조가 개발 한 프로젝트가 선정되었습니다. 이 프로젝트는 RAH-66 Comanche라는 새로운 이름을 받았다. 이전의 일부 미국 헬리콥터처럼, 새 차는 북미 인디언 부족 중 한 사람의 이름을 따서 명명되었습니다. 이 경우 RAH라는 글자는 미국에서 처음으로 사용되었습니다. 정찰과 충격 임무를 똑같이 잘 수행 할 수있는 헬리콥터에는 정찰과 공격 헬리콥터가 적절하게 지정되었습니다.
RAH-66 프로젝트의 개발 계약은 4 월 1991에서 체결되었습니다. 개발자의 선택으로 모든 노력을 집중하고 가능한 모든 자금을 한 프로젝트에만 전달할 수있었습니다. 특히 새로운 시스템에서 사용하도록 제안 된 다양한 시스템에 대한 본격적인 테스트를 시작할 수있었습니다. 이 가능성은 매우 중요합니다. 왜냐하면이 프로젝트는 더 많은 참신함이 있었고 많은 제안을 확인하거나 수정해야했기 때문입니다.
새로운 헬리콥터 설계에는 많은 시간이 필요했습니다. Comanche 헬리콥터의 첫 번째 프로토 타입은 Sikorsky 공장의 조립 공장에서 5 월 1995 말에서만 제거되었습니다. 몇 달은 지상 테스트에 사용되었습니다. 첫 비행은 95의 끝에서 이루어 지지만, 결국 4의 1 월 1996로 이동되었습니다. 시간이 지남에 따라 정찰과 공격 헬리콥터로 제작 된 프로토 타입 프로토 타입 두 가지 테스트가 8 년간 지연되었습니다.
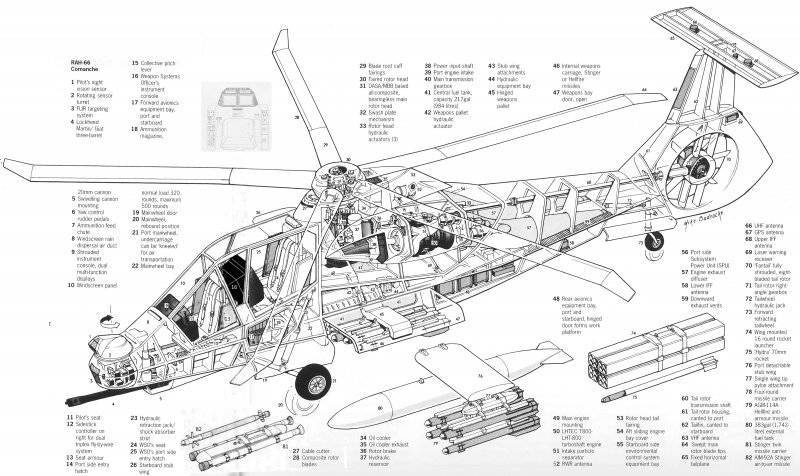
LHX / RAH-66 헬리콥터의 주요 요구 사항 중 하나는 적 탐지 장비의 가시성 감소였습니다. 이러한 이유로 코만치 헬리콥터는 다른 종류의 장비와 구별되는 많은 특징을 가지고있었습니다. 따라서, 기계의 동체의 외부 표면은 서로 다른 각도로 서로 연결된 다수의 직선 패널에 의해 형성된다. 로터 허브 페어링, 환형 채널의 스티어링 스크류 및 수축 가능한 섀시가 사용된다. 동체 측면에 내부 화물칸을 사용하도록 제안 된 무기 배치 용. 동시에, 외부 구획 덮개에는 군비 현가 장치를위한 파일론이 장착되었습니다. 총을 든 노우탑 터렛은 180 °에서 펼쳐지고 배럴을 특별한 케이싱 페어링에 배치해야합니다.
적외선 범위의 가시성을 줄이기 위해 헬리콥터는 원래의 배기 냉각 시스템을 사용했습니다. 엔진을 빠져 나간 후 차가운 대기와 혼합되어 테일 붐의 측면을 따라 위치한 긴 슬릿 노즐을 통해 밖으로 던져졌습니다. 이 시스템은 미국에서 처음으로 사용되었습니다. 이에 앞서 배기 노즐 용 특수 노즐을 사용하여 발생하는 열의 감소를 달성했습니다.
보고서에 따르면 가시성을 줄이기위한 전체 범위의 측정 결과가 상당히 높은 결과를 이끌어 냈습니다. 따라서 AH-64 아파치 헬리콥터와 비교할 때 유효 산란 표면은 약 600 배 감소했습니다. 열 방사선에있는이 헬기의 비교는 Comanche의 4 배 이점을 보여준다.
RAH-66 헬리콥터의 주요 구조 요소는 긴 상자 거더이며 모든 유닛과 동체 스킨 패널이 고정되어 있습니다. 헬리콥터의 피부의 대부분의 동력 요소와 패널은 금속과 플라스틱을 기반으로 한 복합 재료로 만들어졌습니다. 동체 디자인의 흥미로운 특징은 피부의 레이아웃이었습니다. 40 %의 패널은 탈착식으로 제작되었으며 내부 장치를 서비스하기 위해 제거 할 수있었습니다. 파워 키트의 무결성을 유지하면서 클래딩 패널이 손상 되더라도 전체 구조의 강도에는 영향을 미치지 않습니다.


동체 길이 14,4 m의 배치는 단위 배치에 대한 현대적인 견해와 일치했습니다. 활에는 공통 랜턴이있는 이중 오두막이 있었고, 장비 구획과 자동 총이있는 원격 제어 설치가있었습니다. 동체의 중간 부분에는 엔진, 메인 기어 박스, 장비의 일부 및 내부 무기 칸막이가있었습니다. 꼬리 붐은 몇몇 단위의 배치를 위해 주어졌다. 직경 1,37 m의 조향 나사의 가시성을 줄이려면 환형 채널 내부에 놓고 수평 꼬리는 용골 상단에 놓습니다.
개폐식 3 점 섀시는 중간 및 후면 동체에 배치되었습니다. 메인 랙은 뒤쪽으로 돌려서 꼬리 - 앞으로 돌리면서 후퇴했습니다. 스트러트와 쇼크 업소버의 설계로 인해 수직 주행 속도가 빨라 착지시 충격 에너지의 일부를 흡수 할 수있었습니다. 또한, 주차 위치에서 랙이 부분적으로 수축되어 전체 XNUMM에 대한 기계의 주차 높이가 감소합니다.
초기에 LHX 헬리콥터에는 터보 샤프트 엔진이 하나만 있어야했지만 나중에는 더 신뢰할 수있는 트윈 엔진 동력 장치를 사용하기로 결정되었습니다. 80 년대 중반에는 LHTEC의 발전으로 유망한 헬리콥터 엔진 개발을위한 경쟁이 시작되었습니다. RAH-66 헬리콥터 동체의 중간 부분에는 800 마력 X가 장착 된 T801-LXT-1560 엔진 2 대가 장착되었습니다. 보조 엔진 인 WTS124가 제공되어 주 엔진 사이에 배치되며 시동기 및 일부 시스템의 작동을 보장하는 수단으로 사용됩니다.
동체의 중간 부분에는 페어링이 장착 된 로터 허브가있었습니다. 직경이 11,9 인 회 전자에는 5 개의 날이 있으며 완전히 복합재로되어 있습니다. 블레이드 측면에서 직사각형 모양뿐만 아니라 화살표 모양의 결말을 갖추고 있습니다. 큰 구경의 작은 라이플이 쳤을 때 메인 로터가 성능을 유지한다고 주장했다. оружия.
동체의 전방 부분에는 조종사 배치의 이중 승무원이 있었다. 흥미로운 사실은 조종사가 전방 조종석에 있었고 무기 조작원이 뒤쪽에 위치해 있다는 것입니다. 이 조종사의 비표준 위치는 사령관의 기내에서 최상의 시야를 확보하기 위해 사용되었습니다.

두 선실 모두 같은 장비를 사용했습니다. 두 조종사 모두 한 세트의 비행 도구와 완전한 통제 장치를 가지고있었습니다. 두 캐빈 대시 보드의 주요 구성 요소는 크기가 200х150 mm 인 두 개의 LCD 디스플레이였습니다. 왼쪽 단색 화면은 감시 시스템에서 비디오 신호를 출력하도록 설계되었으며, 오른쪽 색상 화면은 탐색, 비행 및 전술 정보를 표시합니다. 또한, 부스에는 몇 개의 작은 단색 디스플레이가있었습니다. 대시 보드 하단에 필요한 정보를 입력하는 키보드가 설치되어 있습니다.
RAH-66 헬리콥터의 탑재 장비의 중요한 요소는 헬멧 장착 표시 시스템이있는 파일럿 헬멧이되었습니다. 헬멧 시스템은 작동 모드에 따라 비행 매개 변수, 3 차원지도, 감시 시스템의 이미지 등에 대한 정보를 표시 할 수 있습니다. 따라서 헬멧 장착 실드를 사용하여 지휘관이 조종에 필요한 정보를 얻을 수 있었고 운영자는 대시 보드에 산만하지 않고 군비를 사용할 수있었습니다.
조종석에는 일련의 보호 장치가있었습니다. 조종석은 가벼운 방탄복으로 덮여있었습니다. 화학 무기, 생물학 무기 또는 핵무기를 보호하기 위해 기내에서 작은 과압이 유지되었습니다. 가압 시스템은 또한 전자 장비의 구획을 보호합니다.
보잉 - 시코 르 스키 RAH-66 Comanche 헬리콥터의 항공 전자 장비는 운전실 아래에 위치한 한쪽 구획과 2 개의 테일 건에 위치해있었습니다. 헬리콥터의 항공 전자 공학에서는 디지털 장비 만 사용했습니다. 무선 전자 장비의 기본은 다른 장비의 상호 작용과 필요한 모든 정보의 처리를 보장하는 2 대의 디지털 컴퓨터였습니다. 생산을 단순화하기 위해 70 %의 BREO 단지는 록히드 마틴 F-22A 랩터 전투기 장비와 호환되었습니다.
헬리콥터는 정찰 임무를 고려하여 탐지, 통신 및 데이터 전송 수단을 제공 받았습니다. 탐지 된 물체의 좌표와 위치를 결정하기 위해 RAH-66는 위성 및 관성 항법 시스템을 결합했습니다. 헬리콥터는 AH-64 헬리콥터의 최신 수정에 사용 된 Longbow 시스템의 개발 인 레이더 스테이션을 수행하기로되어있었습니다. 앞쪽 반구의 적외선 및 TV 시청 시스템뿐만 아니라 대상을 강조 표시하는 레이저 광학 전자 시스템은 방위각이 52 °이고 고도가 35 ° 인 섹터를 관측 할 수있었습니다.
Comanche 항공 전자 공학의 흥미로운 특징은 검색 모드 및 표적 공격에서 작동하는 알고리즘이되었습니다. 헬리콥터의 생존 가능성을 높이려면 오랫동안 피난소를 떠나지 말아야합니다. 이 경우 승무원은 필요한 높이까지 올라와 지형 스캔을 수행하고 지형의 주름을 다시 숨겨야합니다. 장비는 수집 된 정보를 "기억"하므로 운영자가 목표를 찾을 수 있고 위험없이 공격 준비를 할 수 있습니다. 탑재 된 시스템의 메모리에는 적군과 나토 국가의 주요 목표물, 장비 및 장비에 대한 서명이있었습니다. 대상 유형의 자동 인식은 화재 발생 가능성을 줄이는 것으로 가정했습니다.

RAH-66 헬리콥터는 독립적으로 목표물을 공격 할 수 있었고 대상에 대한 정보를 다른 유닛에 전송할 수있었습니다. 정보는 무소음 무선 채널을 통해 전송되었습니다.
헬리콥터를 제어하기 위해 3 중 이중화 기능이있는 2 채널 디지털 라디오 추적 시스템을 사용하는 것이 좋습니다. 사용 된 EDSU는 세 가지 모드로 사용될 수 있습니다. 첫 번째로, 그녀는 자동으로 비행 매개 변수를 고려하지 않았고, 기계의 조종 장치를 조종사에게 완전히 이전했습니다. 두 번째 모드에서는 다양한 센서의 데이터를 기반으로 자동화가 주어진 속도와 고도를 유지하는 데 도움을 주었고 프로펠러의 발전소와 매개 변수도 제어했습니다. 세 번째 모드는 무기 제어 시스템과 상호 작용하는 본격적인 자동 조종 장치입니다. 이 경우 자동 장치가 헬리콥터를 전투 코스로 독립적으로 철회하고 표시된 대상의 공격을 수행 할 수 있습니다. 엔진을 제어하려면 별도의 디지털 시스템을 사용했습니다.
RAH-66 헬리콥터의 내장 무장은 XM301 자동 대포 1 개와 회전하는 배럴 블록으로 구성됩니다. 총에는 3 배럴 구경 20 mm이있었습니다. 탄약통 - 320 또는 500 껍질. 총은 전방 반구의 포격 대상을 허용하는 터닝 터렛에 장착되었습니다. 공기 표적에서 발사 할 때 XM301는 분당 1500 발사를 할 수 있습니다. 지상 목표를 물리 칠 때는 속도의 절반을 사용했습니다.
포탑의 흥미로운 특징은 사용 된 운송 위치입니다. 헬리콥터의 가시성을 줄이기 위해, 필요하다면, 총신은 비행을 따라 뒤로 돌려졌고 특별한 케이스에 넣어졌습니다. 헬리콥터의 코 안쪽의 볼륨이 제한되어 있기 때문에 프로젝트 작성자는 흥미로운 탄약 시스템을 사용해야했습니다. 500 껍데기의 드럼 샵은 대포와 충분히 멀리 떨어져있는 운전실 아래에 있습니다. 탄약 공급은 특수 컨베이어를 사용하여 수행되었습니다.
미사일 군비는 공중 화물칸에서 수송되도록 제안되었다. 이 격실의 치수는 AGM-114 Hellfire 공대 지형 미사일과 AIM-92 Stinger 공대공의 치수에 의해 결정되었습니다. 또한, 헬리콥터는 유도되지 않은 히드라 70 미사일을 사용할 수 있습니다. RAH-66 헬리콥터를위한 새로운 무기 개발은 계획되지 않았습니다. 무기의 정지를 위해 화물칸의 측면 플랩 - 해치에서 홀더를 사용하도록 제안되었습니다. 무기를 사용하기 전에 새시를 수평 위치로 올려야합니다. 그들 각각은 3 개의 서스펜션 어셈블리를 가지고있었습니다.
화력을 증가시키기 위해 RAH-66 Comanche 헬리콥터는 EFAMS 서스펜션 시스템을 사용할 수 있습니다. 그것은 헬리콥터의 측면에 장착 된 두 개의 날개로 구성됩니다. 이 날개에 달린 현수 조립체는 로켓 군비의 총 탄약을 증가시켜보다 복잡한 충격 과제를 해결할 수있게했습니다. 그러나이 경우 날개를 어느 정도 설치하면 최대 비행 속도가 감소합니다.
LHX 프로젝트의 초기 기술 과제에는 약 3800 kg의 이륙 중량을 가진 헬리콥터가 필요했습니다. Ready "Comanche"는 훨씬 더 어려워졌습니다. 빈 헬리콥터의 질량은 4200 kg, 정상적인 이륙 - 5800 kg을 초과했습니다. 최대 이륙 중량이 7900 kg에 도달했으며 이는 초기 요구 사항의 두 배 이상입니다. 그러나 새로운 연구 및 계산 결과에 따라 기술 업무가 여러 번 변경되었습니다.

1996 시작 초기에 시작된이 테스트는 새로운 헬리콥터의 비행 데이터를 확립하는 것을 허용했습니다. 최대 속도는 324 km / h에 도달했습니다. 절두 원뿔 모양의 상부 슬리브 레이더의 페어링을 설치 한 후 최대 속도가 317 km / h로 떨어졌습니다. EFAMS의 추가적인 날개의 정지는 비행 속도를 약 20 km / h까지 감소시켰다. 헤드셋 안테나가없는 순항 속도는 296 km / h에 도달했습니다. 안테나 사용 - 275 km / h. 실제 헬리콥터의 천장은 5 km이고, 정적 인 것은 3,5 km입니다. 경제적 인 엔진과 체적의 내부 연료 탱크로 인해 헬리콥터의 실제 범위는 900 km로 조정되었습니다. 페리 범위 - 2335 km.
RAH-66 프로젝트는 80 년대 후반과 90 년대 초반의 지정 학적 변화뿐만 아니라 ATS와 소련의 붕괴로 운명이 바뀐 운명의 하나였다. 유망한 프로젝트의 비용을 줄이면 새로운 헬리콥터 개발에 영향을 미쳤습니다. 그래서 90 년대 중반에 Comanches 구매 계획이 5000에서 1300 단위로 축소되었습니다. 앞으로 계획 구매에 대한 새로운 감축 문제가 반복적으로 제기되었습니다. 또한, 군대의 변화하는 견해. 디자인 작업이 시작된 이래로 고객은 유망한 시스템에 대한 요구 사항을 반복적으로 변경했습니다. 임무를 수행함에 따라 정찰이나 파업 능력에 편향이있었습니다.
2003 년이 끝날 때까지 헬리콥터를 유망한 다양한 시스템의 테스트, 세밀화 및 정제가 계속되었습니다. 이 시간까지, 프로젝트의 타당성에 대한 논의가 미국 지배 그룹에서 다시 시작되었습니다. RAH-66 헬리콥터의 지지자들은 높은 성능과 다양성을 호소했습니다. 반대자들은 재정적 측면에서 압박을 받았다. 이 무렵, Comanche 헬리콥터의 개발과 테스트에 7 달러가 소요되었습니다. 직렬 장비의 추가 작업과 건설을 고려하면 프로젝트의 총 비용은 40 억을 달성 할 수 있습니다.
수많은 토론에서 새로운 헬리콥터에 대한 다른 주장이 언급되었습니다. 기계의 개발은 20 년 이상 지연되어 왔으며 기술적 인 사양의 반복 된 개선으로 인해 프로젝트의 관련성을 제공 할 수 없다는 것이 지적되었습니다. 또한 새로운 RAH-66의 특성이 특정 작업을 해결하기에 불충분하거나 불충분하다고 생각하여 아프가니스탄과 이라크에서 헬리콥터를 군대에 사용하는 것을 비판했습니다. 정찰 작업은 무인 항공기에 의해 수행 될 수 있으며 전문 헬리콥터를 만들 필요가 없다는 점도 지적했다.
RAH-66 Comanche 프로젝트의 운명은 미국 국방부의 지도부가 모든 작업을 중단하기로 결정했을 때 24 February 2004로 결정되었습니다. 이 프로젝트의 종결은 미 국방부 예산에 타격을 가했다. 발전의 조기 종료를 보상하기 위해 군부는 보잉 및시 코르 스키 (Sikorsky) 회사에 대해 1 억 달러의 보상금을 지불해야했습니다.
프로젝트가 종료 될 때까지 XNUMX 대의 프로토 타입 헬리콥터가 건설되었습니다. 몇 년 후 장비를 분해 한 기계는 비행 미 육군 박물관 (앨라배마 주 포트 러커). RAH-66 프로젝트의 개발은 사라지지 않았습니다. 새로운 헬리콥터 개발 과정에서 생성 된 아이디어와 솔루션은 이제 새로운 헬리콥터 기술 프로젝트에 사용됩니다. 일부 장비는 나중에 AH-64 Apache 공격 헬리콥터의 새 버전에서 사용하도록 제공되었습니다. 또한 향후 기존 장비를 대체 할 새로운 헬리콥터를 개발할 계획입니다. 아마도이 기계는 XNUMX 년 전 군대와 정치인들에게는 적합하지 않은 코만치의 직접적인 발전이 될 것입니다.
해당 사이트의 자료 :
http://airwar.ru/
http://boeing.com/
http://army-technology.com/
http://militaryfactory.com/
http://popmech.ru/
http://worldweapon.ru/
http://aviastar.org/

RAH-66 헬리콥터의 출현을위한 주요 전제 조건은 기존 미국 헬리콥터 건쉽의 기능을 분석 한 올해의 1982 보고서입니다. 대부분의 무장 차량은 바르샤바 조약과의 무력 충돌 상황에서 배정 된 전투 임무를 효과적으로 수행 할 수 없다고 밝혔다. 미국 군대는 적의 공중 방어를 극복하고 표적을 찾고 파괴 할 수있는 새로운 차량이 필요했습니다.
1983 년,보고가 발표 된 지 불과 몇 달 후 펜타곤은 LHX 프로그램 (Light Helicopter Experimental)의 출시를 시작했습니다.이 목적은 단일 디자인을 기반으로 두 개의 헬리콥터를 만드는 것이 었습니다. 그 중 하나 (LHX-SCAT라고 함)는 정찰과 파업을 목적으로했으며 두 번째 (LHX-UTIL)는 다목적 기계로 간주되었습니다.
새로운 프로그램은 즉시 항공기 제조업체의 관심을 끌었습니다. 경쟁에서 우승 한 이후로 장비 공급을위한 최대 규모의 계약에 서명했기 때문입니다. 공군과 해병대를 제외한 지상군 만이 수천 개의 새로운 헬리콥터를 주문할 계획이었습니다. 그것은 AH-5, OH-2900 및 OH-1 헬리콥터를 대체 할 LHX-SCAT 6 헬리콥터를 구입할 계획이었으며, 더 이상 사용되지 않는 다목적 UH-58을 대체하기 위해 더 많은 2 LHX-UTIL 천명을 계획했습니다.
그럼에도 불구하고 커다란 계약을 맺을 전망은 군대의 요구에 따라 복잡했다. 군대는 독특한 특성을 가진 헬리콥터를 얻고 자했으며, 그 개발에는 특별한 노력이 필요할 것입니다. 레이더, 적외선 및 음향 범위에서 가능한 한 낮은 가시성을 보장하는 것이 필요했습니다. 또한 헬리콥터의 최대 속도는 400-450 km / h에 도달하여 당시의 모든 기존 기계의 성능을 크게 뛰어 넘었습니다. LHX-SCAT 정찰 및 공격 헬리콥터에는 단일 선실, 특수 장비 세트 및 3800 kg 주문의 이륙 중량이 있어야합니다. LHX-UTIL은 여객 6 명 또는화물 600 kg을 운반하도록 설계되었으며, 조종사 2 명에 의해 통제되고 SCAT 수정보다 약간 더 커야했습니다.

미국의 4 대 항공기 제조 회사가 LHX 경쟁 입찰을 제출했습니다. Bell, Boeing, Hughes 및 Sikorsky는 유망한 기계를 개발하고자하는 열망을 표했습니다. 이 단체의 전문가들은 헬리콥터 개발 전망에 대한 자신의 견해를 가지고 있었기 때문에 완전히 다른 모습의 여러 프로젝트가 출현하게되었습니다. 예를 들어, 회사 인 "Sikorsky"는 동축 베어링 나사와 꼬리를 밀고있는 자동차를 제공했습니다. 그런 배열은 가장 가능한 가능한 비행 속도를 보장하기로되어 있었다. 시코 르 스키 (Sikorsky) 사가 미래에도 유사한 아이디어를 계속 개발해 왔으며 현재 유사한 프로젝트 인 S-97에 종사하고 있음이 주목할 만합니다.
예비 프로젝트를 개발하는 동안 필요한 특성을 가진 LHX 헬리콥터를 만드는 것은 어려운 작업 인 것으로 밝혀졌으며, 이는 경쟁자가 강제로 합류하게 된 이유입니다. 보잉 헬리콥터 부서는 Sikorsky와의 작업을 시작했으며 Bell 전문가는 이번에 휴즈 (Hughes)가 포함 된 McDonnell Douglas의 동료들과 협력하기 시작했습니다. 1988 가을에,이 두 컨소시엄은 작업 계속을위한 계약을 받았습니다.
이 단계의 임무는 기계의 이륙 중량 및 비용의 설정 값을 유지하면서 요구 사항을 충족 할 가능성을 결정하는 것이 었습니다. 또한 헬리콥터의 레이아웃을 점검하고 전자 장비의 통합 작업을 수행했습니다. 이 단계에서 고객이 유망한 기술에 대한 요구 사항을 완화해야한다는 것이 분명해졌습니다. 최대 비행 속도를 350 km / h 이상으로 제공하는 것은 기술적 인 관점에서 볼 때 매우 어려웠습니다. 또한, 연구 결과에 따르면 이러한 속도로 저고도 비행은 고도의 자격을 갖춘 조종사 만 이용할 수 있습니다.
군대는 최대 속도에 대한 요구 사항을 변경하고 다용도 헬리콥터 LHX-UTIL 개발을 취소했습니다. 80 년대 중반 이후, LHX 프로그램을위한 자금은 꾸준히 감소하고 있으며, 몇 번이나 작업을 중단하라는 제안이있었습니다. 그럼에도 불구하고 프로그램은 계속되었지만 축소되었습니다. 제한된 재정적 능력으로 인해, 펜타곤과 참여하는 회사들은 기술 솔루션을 개발하는 새로운 방법을 적용해야했습니다. 대부분의 아이디어와 제안은 컴퓨터 시뮬레이션을 사용하여 테스트되었습니다. 일부 유닛과 어셈블리는 비행 실험실에서 테스트되었습니다.
1991의 봄까지, 군대는 새로운 헬리콥터를 개발할 사람을 결정한 다음 대량 생산을 시작했습니다. 두 가지 제안 된 프로젝트 중 보잉 -시 코르 스키 (Boeing-Sikorsky) 노조가 개발 한 프로젝트가 선정되었습니다. 이 프로젝트는 RAH-66 Comanche라는 새로운 이름을 받았다. 이전의 일부 미국 헬리콥터처럼, 새 차는 북미 인디언 부족 중 한 사람의 이름을 따서 명명되었습니다. 이 경우 RAH라는 글자는 미국에서 처음으로 사용되었습니다. 정찰과 충격 임무를 똑같이 잘 수행 할 수있는 헬리콥터에는 정찰과 공격 헬리콥터가 적절하게 지정되었습니다.

RAH-66 프로젝트의 개발 계약은 4 월 1991에서 체결되었습니다. 개발자의 선택으로 모든 노력을 집중하고 가능한 모든 자금을 한 프로젝트에만 전달할 수있었습니다. 특히 새로운 시스템에서 사용하도록 제안 된 다양한 시스템에 대한 본격적인 테스트를 시작할 수있었습니다. 이 가능성은 매우 중요합니다. 왜냐하면이 프로젝트는 더 많은 참신함이 있었고 많은 제안을 확인하거나 수정해야했기 때문입니다.
새로운 헬리콥터 설계에는 많은 시간이 필요했습니다. Comanche 헬리콥터의 첫 번째 프로토 타입은 Sikorsky 공장의 조립 공장에서 5 월 1995 말에서만 제거되었습니다. 몇 달은 지상 테스트에 사용되었습니다. 첫 비행은 95의 끝에서 이루어 지지만, 결국 4의 1 월 1996로 이동되었습니다. 시간이 지남에 따라 정찰과 공격 헬리콥터로 제작 된 프로토 타입 프로토 타입 두 가지 테스트가 8 년간 지연되었습니다.
LHX / RAH-66 헬리콥터의 주요 요구 사항 중 하나는 적 탐지 장비의 가시성 감소였습니다. 이러한 이유로 코만치 헬리콥터는 다른 종류의 장비와 구별되는 많은 특징을 가지고있었습니다. 따라서, 기계의 동체의 외부 표면은 서로 다른 각도로 서로 연결된 다수의 직선 패널에 의해 형성된다. 로터 허브 페어링, 환형 채널의 스티어링 스크류 및 수축 가능한 섀시가 사용된다. 동체 측면에 내부 화물칸을 사용하도록 제안 된 무기 배치 용. 동시에, 외부 구획 덮개에는 군비 현가 장치를위한 파일론이 장착되었습니다. 총을 든 노우탑 터렛은 180 °에서 펼쳐지고 배럴을 특별한 케이싱 페어링에 배치해야합니다.
적외선 범위의 가시성을 줄이기 위해 헬리콥터는 원래의 배기 냉각 시스템을 사용했습니다. 엔진을 빠져 나간 후 차가운 대기와 혼합되어 테일 붐의 측면을 따라 위치한 긴 슬릿 노즐을 통해 밖으로 던져졌습니다. 이 시스템은 미국에서 처음으로 사용되었습니다. 이에 앞서 배기 노즐 용 특수 노즐을 사용하여 발생하는 열의 감소를 달성했습니다.
보고서에 따르면 가시성을 줄이기위한 전체 범위의 측정 결과가 상당히 높은 결과를 이끌어 냈습니다. 따라서 AH-64 아파치 헬리콥터와 비교할 때 유효 산란 표면은 약 600 배 감소했습니다. 열 방사선에있는이 헬기의 비교는 Comanche의 4 배 이점을 보여준다.
RAH-66 헬리콥터의 주요 구조 요소는 긴 상자 거더이며 모든 유닛과 동체 스킨 패널이 고정되어 있습니다. 헬리콥터의 피부의 대부분의 동력 요소와 패널은 금속과 플라스틱을 기반으로 한 복합 재료로 만들어졌습니다. 동체 디자인의 흥미로운 특징은 피부의 레이아웃이었습니다. 40 %의 패널은 탈착식으로 제작되었으며 내부 장치를 서비스하기 위해 제거 할 수있었습니다. 파워 키트의 무결성을 유지하면서 클래딩 패널이 손상 되더라도 전체 구조의 강도에는 영향을 미치지 않습니다.


동체 길이 14,4 m의 배치는 단위 배치에 대한 현대적인 견해와 일치했습니다. 활에는 공통 랜턴이있는 이중 오두막이 있었고, 장비 구획과 자동 총이있는 원격 제어 설치가있었습니다. 동체의 중간 부분에는 엔진, 메인 기어 박스, 장비의 일부 및 내부 무기 칸막이가있었습니다. 꼬리 붐은 몇몇 단위의 배치를 위해 주어졌다. 직경 1,37 m의 조향 나사의 가시성을 줄이려면 환형 채널 내부에 놓고 수평 꼬리는 용골 상단에 놓습니다.
개폐식 3 점 섀시는 중간 및 후면 동체에 배치되었습니다. 메인 랙은 뒤쪽으로 돌려서 꼬리 - 앞으로 돌리면서 후퇴했습니다. 스트러트와 쇼크 업소버의 설계로 인해 수직 주행 속도가 빨라 착지시 충격 에너지의 일부를 흡수 할 수있었습니다. 또한, 주차 위치에서 랙이 부분적으로 수축되어 전체 XNUMM에 대한 기계의 주차 높이가 감소합니다.
초기에 LHX 헬리콥터에는 터보 샤프트 엔진이 하나만 있어야했지만 나중에는 더 신뢰할 수있는 트윈 엔진 동력 장치를 사용하기로 결정되었습니다. 80 년대 중반에는 LHTEC의 발전으로 유망한 헬리콥터 엔진 개발을위한 경쟁이 시작되었습니다. RAH-66 헬리콥터 동체의 중간 부분에는 800 마력 X가 장착 된 T801-LXT-1560 엔진 2 대가 장착되었습니다. 보조 엔진 인 WTS124가 제공되어 주 엔진 사이에 배치되며 시동기 및 일부 시스템의 작동을 보장하는 수단으로 사용됩니다.
동체의 중간 부분에는 페어링이 장착 된 로터 허브가있었습니다. 직경이 11,9 인 회 전자에는 5 개의 날이 있으며 완전히 복합재로되어 있습니다. 블레이드 측면에서 직사각형 모양뿐만 아니라 화살표 모양의 결말을 갖추고 있습니다. 큰 구경의 작은 라이플이 쳤을 때 메인 로터가 성능을 유지한다고 주장했다. оружия.
동체의 전방 부분에는 조종사 배치의 이중 승무원이 있었다. 흥미로운 사실은 조종사가 전방 조종석에 있었고 무기 조작원이 뒤쪽에 위치해 있다는 것입니다. 이 조종사의 비표준 위치는 사령관의 기내에서 최상의 시야를 확보하기 위해 사용되었습니다.

두 선실 모두 같은 장비를 사용했습니다. 두 조종사 모두 한 세트의 비행 도구와 완전한 통제 장치를 가지고있었습니다. 두 캐빈 대시 보드의 주요 구성 요소는 크기가 200х150 mm 인 두 개의 LCD 디스플레이였습니다. 왼쪽 단색 화면은 감시 시스템에서 비디오 신호를 출력하도록 설계되었으며, 오른쪽 색상 화면은 탐색, 비행 및 전술 정보를 표시합니다. 또한, 부스에는 몇 개의 작은 단색 디스플레이가있었습니다. 대시 보드 하단에 필요한 정보를 입력하는 키보드가 설치되어 있습니다.
RAH-66 헬리콥터의 탑재 장비의 중요한 요소는 헬멧 장착 표시 시스템이있는 파일럿 헬멧이되었습니다. 헬멧 시스템은 작동 모드에 따라 비행 매개 변수, 3 차원지도, 감시 시스템의 이미지 등에 대한 정보를 표시 할 수 있습니다. 따라서 헬멧 장착 실드를 사용하여 지휘관이 조종에 필요한 정보를 얻을 수 있었고 운영자는 대시 보드에 산만하지 않고 군비를 사용할 수있었습니다.
조종석에는 일련의 보호 장치가있었습니다. 조종석은 가벼운 방탄복으로 덮여있었습니다. 화학 무기, 생물학 무기 또는 핵무기를 보호하기 위해 기내에서 작은 과압이 유지되었습니다. 가압 시스템은 또한 전자 장비의 구획을 보호합니다.
보잉 - 시코 르 스키 RAH-66 Comanche 헬리콥터의 항공 전자 장비는 운전실 아래에 위치한 한쪽 구획과 2 개의 테일 건에 위치해있었습니다. 헬리콥터의 항공 전자 공학에서는 디지털 장비 만 사용했습니다. 무선 전자 장비의 기본은 다른 장비의 상호 작용과 필요한 모든 정보의 처리를 보장하는 2 대의 디지털 컴퓨터였습니다. 생산을 단순화하기 위해 70 %의 BREO 단지는 록히드 마틴 F-22A 랩터 전투기 장비와 호환되었습니다.
헬리콥터는 정찰 임무를 고려하여 탐지, 통신 및 데이터 전송 수단을 제공 받았습니다. 탐지 된 물체의 좌표와 위치를 결정하기 위해 RAH-66는 위성 및 관성 항법 시스템을 결합했습니다. 헬리콥터는 AH-64 헬리콥터의 최신 수정에 사용 된 Longbow 시스템의 개발 인 레이더 스테이션을 수행하기로되어있었습니다. 앞쪽 반구의 적외선 및 TV 시청 시스템뿐만 아니라 대상을 강조 표시하는 레이저 광학 전자 시스템은 방위각이 52 °이고 고도가 35 ° 인 섹터를 관측 할 수있었습니다.
Comanche 항공 전자 공학의 흥미로운 특징은 검색 모드 및 표적 공격에서 작동하는 알고리즘이되었습니다. 헬리콥터의 생존 가능성을 높이려면 오랫동안 피난소를 떠나지 말아야합니다. 이 경우 승무원은 필요한 높이까지 올라와 지형 스캔을 수행하고 지형의 주름을 다시 숨겨야합니다. 장비는 수집 된 정보를 "기억"하므로 운영자가 목표를 찾을 수 있고 위험없이 공격 준비를 할 수 있습니다. 탑재 된 시스템의 메모리에는 적군과 나토 국가의 주요 목표물, 장비 및 장비에 대한 서명이있었습니다. 대상 유형의 자동 인식은 화재 발생 가능성을 줄이는 것으로 가정했습니다.

RAH-66 헬리콥터는 독립적으로 목표물을 공격 할 수 있었고 대상에 대한 정보를 다른 유닛에 전송할 수있었습니다. 정보는 무소음 무선 채널을 통해 전송되었습니다.
헬리콥터를 제어하기 위해 3 중 이중화 기능이있는 2 채널 디지털 라디오 추적 시스템을 사용하는 것이 좋습니다. 사용 된 EDSU는 세 가지 모드로 사용될 수 있습니다. 첫 번째로, 그녀는 자동으로 비행 매개 변수를 고려하지 않았고, 기계의 조종 장치를 조종사에게 완전히 이전했습니다. 두 번째 모드에서는 다양한 센서의 데이터를 기반으로 자동화가 주어진 속도와 고도를 유지하는 데 도움을 주었고 프로펠러의 발전소와 매개 변수도 제어했습니다. 세 번째 모드는 무기 제어 시스템과 상호 작용하는 본격적인 자동 조종 장치입니다. 이 경우 자동 장치가 헬리콥터를 전투 코스로 독립적으로 철회하고 표시된 대상의 공격을 수행 할 수 있습니다. 엔진을 제어하려면 별도의 디지털 시스템을 사용했습니다.
RAH-66 헬리콥터의 내장 무장은 XM301 자동 대포 1 개와 회전하는 배럴 블록으로 구성됩니다. 총에는 3 배럴 구경 20 mm이있었습니다. 탄약통 - 320 또는 500 껍질. 총은 전방 반구의 포격 대상을 허용하는 터닝 터렛에 장착되었습니다. 공기 표적에서 발사 할 때 XM301는 분당 1500 발사를 할 수 있습니다. 지상 목표를 물리 칠 때는 속도의 절반을 사용했습니다.
포탑의 흥미로운 특징은 사용 된 운송 위치입니다. 헬리콥터의 가시성을 줄이기 위해, 필요하다면, 총신은 비행을 따라 뒤로 돌려졌고 특별한 케이스에 넣어졌습니다. 헬리콥터의 코 안쪽의 볼륨이 제한되어 있기 때문에 프로젝트 작성자는 흥미로운 탄약 시스템을 사용해야했습니다. 500 껍데기의 드럼 샵은 대포와 충분히 멀리 떨어져있는 운전실 아래에 있습니다. 탄약 공급은 특수 컨베이어를 사용하여 수행되었습니다.
미사일 군비는 공중 화물칸에서 수송되도록 제안되었다. 이 격실의 치수는 AGM-114 Hellfire 공대 지형 미사일과 AIM-92 Stinger 공대공의 치수에 의해 결정되었습니다. 또한, 헬리콥터는 유도되지 않은 히드라 70 미사일을 사용할 수 있습니다. RAH-66 헬리콥터를위한 새로운 무기 개발은 계획되지 않았습니다. 무기의 정지를 위해 화물칸의 측면 플랩 - 해치에서 홀더를 사용하도록 제안되었습니다. 무기를 사용하기 전에 새시를 수평 위치로 올려야합니다. 그들 각각은 3 개의 서스펜션 어셈블리를 가지고있었습니다.
화력을 증가시키기 위해 RAH-66 Comanche 헬리콥터는 EFAMS 서스펜션 시스템을 사용할 수 있습니다. 그것은 헬리콥터의 측면에 장착 된 두 개의 날개로 구성됩니다. 이 날개에 달린 현수 조립체는 로켓 군비의 총 탄약을 증가시켜보다 복잡한 충격 과제를 해결할 수있게했습니다. 그러나이 경우 날개를 어느 정도 설치하면 최대 비행 속도가 감소합니다.
LHX 프로젝트의 초기 기술 과제에는 약 3800 kg의 이륙 중량을 가진 헬리콥터가 필요했습니다. Ready "Comanche"는 훨씬 더 어려워졌습니다. 빈 헬리콥터의 질량은 4200 kg, 정상적인 이륙 - 5800 kg을 초과했습니다. 최대 이륙 중량이 7900 kg에 도달했으며 이는 초기 요구 사항의 두 배 이상입니다. 그러나 새로운 연구 및 계산 결과에 따라 기술 업무가 여러 번 변경되었습니다.

1996 시작 초기에 시작된이 테스트는 새로운 헬리콥터의 비행 데이터를 확립하는 것을 허용했습니다. 최대 속도는 324 km / h에 도달했습니다. 절두 원뿔 모양의 상부 슬리브 레이더의 페어링을 설치 한 후 최대 속도가 317 km / h로 떨어졌습니다. EFAMS의 추가적인 날개의 정지는 비행 속도를 약 20 km / h까지 감소시켰다. 헤드셋 안테나가없는 순항 속도는 296 km / h에 도달했습니다. 안테나 사용 - 275 km / h. 실제 헬리콥터의 천장은 5 km이고, 정적 인 것은 3,5 km입니다. 경제적 인 엔진과 체적의 내부 연료 탱크로 인해 헬리콥터의 실제 범위는 900 km로 조정되었습니다. 페리 범위 - 2335 km.
RAH-66 프로젝트는 80 년대 후반과 90 년대 초반의 지정 학적 변화뿐만 아니라 ATS와 소련의 붕괴로 운명이 바뀐 운명의 하나였다. 유망한 프로젝트의 비용을 줄이면 새로운 헬리콥터 개발에 영향을 미쳤습니다. 그래서 90 년대 중반에 Comanches 구매 계획이 5000에서 1300 단위로 축소되었습니다. 앞으로 계획 구매에 대한 새로운 감축 문제가 반복적으로 제기되었습니다. 또한, 군대의 변화하는 견해. 디자인 작업이 시작된 이래로 고객은 유망한 시스템에 대한 요구 사항을 반복적으로 변경했습니다. 임무를 수행함에 따라 정찰이나 파업 능력에 편향이있었습니다.
2003 년이 끝날 때까지 헬리콥터를 유망한 다양한 시스템의 테스트, 세밀화 및 정제가 계속되었습니다. 이 시간까지, 프로젝트의 타당성에 대한 논의가 미국 지배 그룹에서 다시 시작되었습니다. RAH-66 헬리콥터의 지지자들은 높은 성능과 다양성을 호소했습니다. 반대자들은 재정적 측면에서 압박을 받았다. 이 무렵, Comanche 헬리콥터의 개발과 테스트에 7 달러가 소요되었습니다. 직렬 장비의 추가 작업과 건설을 고려하면 프로젝트의 총 비용은 40 억을 달성 할 수 있습니다.
수많은 토론에서 새로운 헬리콥터에 대한 다른 주장이 언급되었습니다. 기계의 개발은 20 년 이상 지연되어 왔으며 기술적 인 사양의 반복 된 개선으로 인해 프로젝트의 관련성을 제공 할 수 없다는 것이 지적되었습니다. 또한 새로운 RAH-66의 특성이 특정 작업을 해결하기에 불충분하거나 불충분하다고 생각하여 아프가니스탄과 이라크에서 헬리콥터를 군대에 사용하는 것을 비판했습니다. 정찰 작업은 무인 항공기에 의해 수행 될 수 있으며 전문 헬리콥터를 만들 필요가 없다는 점도 지적했다.
RAH-66 Comanche 프로젝트의 운명은 미국 국방부의 지도부가 모든 작업을 중단하기로 결정했을 때 24 February 2004로 결정되었습니다. 이 프로젝트의 종결은 미 국방부 예산에 타격을 가했다. 발전의 조기 종료를 보상하기 위해 군부는 보잉 및시 코르 스키 (Sikorsky) 회사에 대해 1 억 달러의 보상금을 지불해야했습니다.
프로젝트가 종료 될 때까지 XNUMX 대의 프로토 타입 헬리콥터가 건설되었습니다. 몇 년 후 장비를 분해 한 기계는 비행 미 육군 박물관 (앨라배마 주 포트 러커). RAH-66 프로젝트의 개발은 사라지지 않았습니다. 새로운 헬리콥터 개발 과정에서 생성 된 아이디어와 솔루션은 이제 새로운 헬리콥터 기술 프로젝트에 사용됩니다. 일부 장비는 나중에 AH-64 Apache 공격 헬리콥터의 새 버전에서 사용하도록 제공되었습니다. 또한 향후 기존 장비를 대체 할 새로운 헬리콥터를 개발할 계획입니다. 아마도이 기계는 XNUMX 년 전 군대와 정치인들에게는 적합하지 않은 코만치의 직접적인 발전이 될 것입니다.
해당 사이트의 자료 :
http://airwar.ru/
http://boeing.com/
http://army-technology.com/
http://militaryfactory.com/
http://popmech.ru/
http://worldweapon.ru/
http://aviastar.org/
정보