내일의 세계 : 교차로에있는 군 로봇
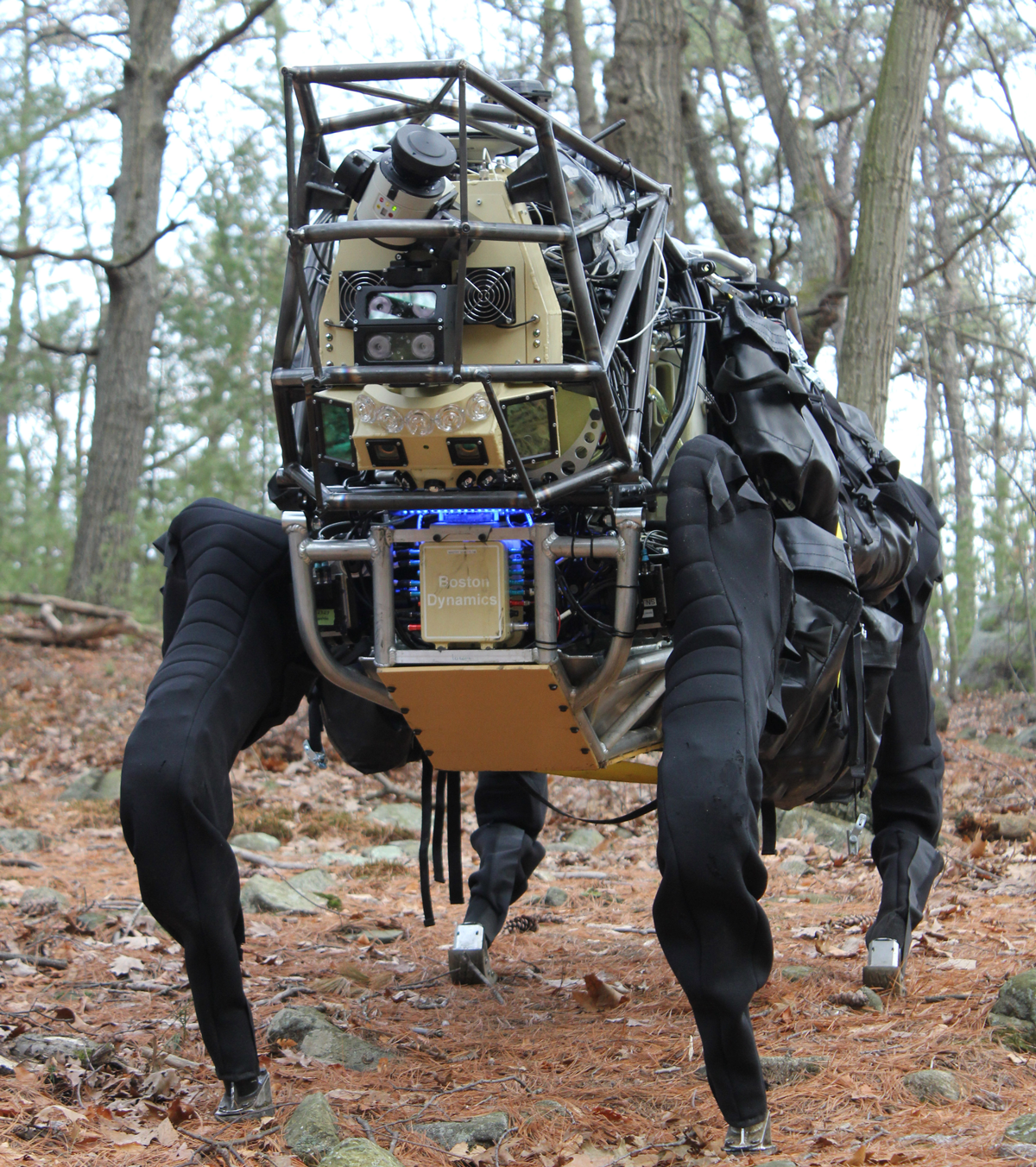
LS3 로봇은 이동성 문제와 배치 된 장치를 동반 할 수있는 시스템의 기능에 대한 새로운 접근법입니다.
오늘날 전체 전투 임무 범위에서 자동 지상 차량(ANA)의 유용성은 더 이상 의심의 여지가 없습니다. 최근의 전투 작전은 여러 시스템의 시험장 역할을 했으며 군대의 강점과 약점을 드러냈습니다. 로봇. 여러 기존 프로그램과 이들이 제공할 기회를 고려하십시오.
수년간의 집중적 인 운행을 거친 후, 자동 지상 차량은 사용자와 군 지휘관에게 유리하게 받아 들여졌지만, 현재 배치 된 시스템이 운영 시설에서 제거되고 미래의 요구 사항이 정의되기 때문에 현재 이러한 능력 개발 방향은 전환점에 있습니다.
군대는 어려운 선택에 직면하고 있습니다 : 기존 시스템 중 어느 것을 남겨 둘 필요가 있는지, 더 이상 필요없는 것이 무엇인지, 단기간에 성장이 필요한지, 그리고 어떻게 능력의 질적 변화를 약속하는 차세대 로봇 시스템을 개발할 것인지를 결정해야합니다.
오늘날 미군은 다양한 유형의 ANA 중 가장 많은 수의 ANA로 무장하고 있기 때문에 세계와 산업의 많은 군대가 계획을 면밀히 주시하고 있음이 분명합니다.
그러나 모든 미군이 해결해야 할 첫 번째 문제는 긴급 자금 조달 프로그램 (예 : 긴급 공동 처방)에서 구입 한 공식 배치 계획을 따르지 않고 현재 배치 된 플랫폼을 처리하는 방법입니다.
"우리는 수년간 구매해온 많은 로봇을 보유하고 있으며 가끔씩은"비정기적인 작업 "이라고도합니다. 로봇 시스템 공동 프로젝트 개발 담당 이사 인 Aaron Roberson, 대형 무인 차량 프로젝트 매니저 RSJPO). "우리는 그들과 무엇을해야할지 모른다. 군대가 그들을지지 할 수단이 없기 때문에 군대가 결정을 내릴 것을 촉구한다."
운영 체제 요구 사항은 완전히 다른 유형의 장치를 구입하여 배포한다는 사실을 나타 냈습니다. 그러한 접근 방식이 시간의 요구를 충족 시킨다면, 현재 비표준 시스템의 형태로 중요한 문제를 제시합니다. Roberson은 군대가 그들과 함께해야 할 일을 결정할 것이고 이러한 결정은 진지하게 받아 들여야한다고 언급했다 : "우리가 그들을 제거하기로 결정한다면, 우리는 프로세스를 시작한 후에 이러한 시스템이 복구되지 않을 것임을 이해해야한다. 우리는 시스템 그 자체뿐만 아니라 그 모든 부분과 우리가 수년간 유지해야만하는 모든 것을 없앨 것입니다. "
미군에 의해 사용되는 많은 ANA 중에 iRobot, 드롭 인 차량, RONS 및 M160 원격 탄약 시스템이 ORotiQ 북미 및 PackBot에서 생산 한 Talon 제품군에는 다양한 변형이 있습니다. 이러한 다양성은 미군의 가장 큰 문제 중 하나 인 관리 및 지원 인프라의 작은 중복에 직면합니다. 독점 시스템을 피하고 개방형 아키텍처를 도입해야하는 필요성은 몇 가지 이니셔티브에서 빨간색 선입니다. 이는 미 육군의 IOP 프로그램 (상호 운용성 프로파일 - 상호 작용 매개 변수)과 선급 우선 AEODRS 폭발물 처리 시스템을위한 미 해군 프로그램에 특히 해당됩니다.


탄약의 원격 중화를위한 로봇 RONS
AEODRS 프로그램의 목표는 다음 세 가지 옵션으로 구성된 장치 제품군을 개발하여 차세대 기능을 확보하는 것입니다. 1 kg 미만의 분산 작동을위한 웨어러블 시스템 인 15,9는 100 미터 거리에서 탐사 및 위협 평가를 수행하며 검사 및 중화 기능이 제한되어 있습니다. 2 킬로미터 거리에서 정찰을 수행하고 위협을 탐지 할 수있는 두명의 전술 작전을 위해 66를 1 킬로그램까지 증가시킵니다. 및 Increment 3 - 무거운 물체를 들어 올릴 수있는 300 kg까지 무게가 나가는 트레일러 시스템. Increment 2 및 3 옵션이 기존 시스템을 대체하도록 설계된 경우 Increment 1 옵션은 기술적 격차를 보완하도록 설계되었습니다.
센터의 로봇 화 부서장 인 Michael Del Signoret에 따르면, AEODRS 프로그램은 운영 플랫폼에서 발견 된 많은 제한 사항을 없애기 위해 설계되었습니다. "이러한 시스템은 서로 다른 폐쇄 형 아키텍처로 구축되어 결과적으로 별도의 운영자 제어 장치와 별도의 공급 채널 및 매우 복잡하고 번거로운 현대화 프로세스로 구축됩니다."
그 목표는 제한된 자율성, 원격 제어, 제한된 모터 기능 및 조작자의 자유도와 같은 문제를 해결하는 것입니다. 상황 인식의 부족; 온보드 카메라의 낮은 인식 깊이; 통신 범위 및 대역폭 문제가 있습니다.
후자는 특히 우려하고있다. "통신 시스템의 범위는 다소 다르지만 채널 너비가 제한되어 있으므로 자율성이나 대량 데이터를 제공 할 수있는 기능과 같이 통합하려는 고급 기능 중 일부는 현재 대역폭을 사용할 수 없습니다 ".
Del Signoret은 AEODRS가 전체 시스템 제품군을위한 공통 아키텍처를 구현함으로써 이러한 문제를 해결하려고 노력할 것이라고 설명했다. 각 옵션은 모듈로 나누어지고 그 사이의 인터페이스는 물리적, 전기적 및 논리적 (무인 시스템의 통합 아키텍처 표준 [JAUS] / SAE AS-4 표준)에서 설치 및 제공하는 공통의 상태 제어 아키텍처에 의해 결정됩니다. 인터페이스, 구현에 대한 정보와 함께 모듈의 특성에 대한 요구 사항을 설명합니다.
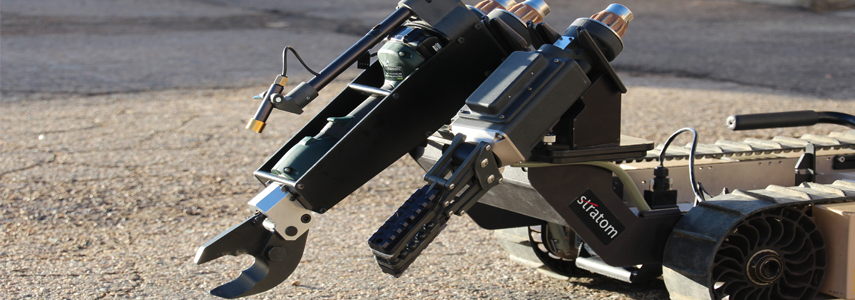

Stratom의 ToolChanger는 5 개의 다른 도구를 받아 들여 자동으로 대체 할 수 있습니다.
그러나 AEODRS는 "자체적으로"존재하는 것이 아니라 다른 시스템과의 상호 작용을 위해 만들어졌습니다. "AEODRS와 IOP 프로그램은 서로 밀접하게 얽혀 있으며 AEODRS가 실제로 IOP 이니셔티브의 명세라는 것이 가장 적합합니다. 95 %의 AEODRS 아키텍처는 IOP와 호환되며 현재 100 %에서 호환되지 않는 영역을 조화시키기 위해 노력하고 있습니다. "
Increment 1 및 2 옵션에는 양손 작업, 중간 지점 탐색, 독립적 조작, 동작중인 2D 및 3D 맵 작성 기능, 온보드 컨테이너에서의 독립 도구 변경 사항을 필요로하는 작업 해결에 필요한 조작 기능을 포함하는 고급 기능이 통합됩니다 최대 12 시간까지 확장됩니다.
"결과적으로 우리는 사용자 기술을 훨씬 빠르게 제공 할 수있게 될 것입니다. 왜냐하면 더 많은 "플레이어"가 게임에 머무를 수 있다고 믿기 때문입니다. 소형 로봇 회사는 이제 개방형 아키텍처에 액세스 할 수 있습니다. 우리는 업계에 디버그 모델을 제공하고자합니다. 그러면이 모델을 기반으로 모듈을 개발하여이 기술을 우리에게 시연 할 수 있습니다. 이것이 필요한 경우 우리 시스템에 쉽게 통합 될 것입니다. "
AEODRS에 정의 된 요구 사항 중 일부를 충족시킬 수있는 많은 시스템이 AEODRS에 특별히 포함되지는 않았지만 이미 개발 중에 있습니다. Adroit HDT Robotics 암은 16 자유도로 조립되었으며, 10에는 드라이브가 있고 6 (먼 핀 경첩)은 미분을 통해 구동됩니다. Adroit 손 무게는 9 kg 미만이며 22 kg은 들어올 수 있으며 각 경첩은 초당 120 °보다 빠르게 회전 할 수 있습니다.
노스 롭 그루 먼 (Northsc Grumman) (랍스터라고도 함)이 개발 한 DADM (Dual Armed Dexterous Manipulator)은 캘리포니아 소재 Applied Minds와 공동으로 개발 중입니다. DADM을 사용하면 상용 기성 구성 요소를 널리 사용할 수 있으며 전체 시스템은 DADM 플랫폼과 운영자 컨트롤러의 두 가지 주요 요소로 구성됩니다.
매니퓰레이터는 공통 하우징에 부착 된 두 개의 그리퍼로 구분되며 각 하우징에는 매우 유연한 기능을 가진 8 자유도가 있습니다. 이 구성은 사람의 크기와 움직임에 거의 일치하는 반면 매니퓰레이터는 가방을 풀거나 작은 와이어를 절단하는 것과 같이 매우 정확한 작업을 수행하도록 설계되었습니다. 제어 유닛은 비슷하게 구성된 운전자 핸들 세트를 가지며, 그 조작 및 입력 데이터는 조작기를 복사합니다. 높은 수준의 조작 기능을 유지하고 DADM 자체가 의도 된 고정밀 작업을 수행하기 위해 3-D 비디오 스트림이 헤드 장착 작동 자 디스플레이로 출력된다는 점에 유의해야합니다. 고해상도 스테레오 카메라와 함께 제공되며 정확한 조작 작업을 수행하는 데 필요한 인식의 깊이를 제공합니다.
로봇 시스템 용 노스 롭 그루먼 (Northrop Grumman) 회사는 또한 두 개의 공구 용기를 제조했습니다. British Army 's Cutlass 시스템에는 로봇 팔에 대해 세 가지 세트를 수용 할 수있는 컨테이너가 있습니다. 시스템은 작업자의 신호없이 이러한 세트를 자동으로 변경할 수 있으므로 작업 본문을 변경하기 위해 장치를 사용자에게 반환 할 필요가 없습니다.
IRobot은 Stratom과 공동으로 유사한 시스템을 개발했습니다. ToolChanger 키트를 사용하면 다양한 작업 본문을 PackBot에 배치하고 운영자의 개입없이 자동으로 변경할 수 있습니다. 후방 부분에 설치된 서스펜션에서 장치는 최대 5 개의 악기를 수용 할 수 있습니다. 일반적인 키트에는 와이어 커터, 레이크, 블라스팅 장치 및 조작기가 포함됩니다. 공구 연결 헤드가 로봇 암에 통합되어 있습니다.
AEODRS 프로그램과 마찬가지로 IOP 이니셔티브는 주로 균일성에 중점을 둡니다. Joint Ground Robotics Enterprise의 한 전문가는 IOP가 NATO 표준 인 STANAG 및 미국 산업 표준 및 국방부 표준 인 MIL-SPEC과 호환되는 표준을 추가로 제공한다고 설명했습니다. 또한 소규모 자동화 시스템을위한 군사 통신 프로토콜이 개발 될 것이며 이러한 시스템을위한 전체 제어 아키텍처의 인터페이스 표준에 대한 연구가 수행 될 것입니다.
IOP 및 AEODRS 만 개방형 아키텍처 및 표준화를 도입하는 유일한 활동은 아닙니다. 이스라엘 회사 인 G-NIUS는 전에 사용 된 12 "박스"대신에 ANA Guardium과 AvantGuard 라인을 위해 개발 된 기술을 개발하여 로봇 요소를 단일 장치에 통합했습니다. 이 메인 유닛은 어떤 지상 차량과도 통합 될 수 있으며, 일부 정련 후에는 ANA로 바꿀 수 있습니다. G-NIUS는 다양한 플랫폼을 테일리스 구성으로 리메이크 할 수있는 능력을 입증했습니다. 오늘은 장갑차 BMP, M113 및 Stryker, HMMWV, Ford X-350 트럭 및 쿼드 바이크입니다.
그동안 터키 회사 Aselsan은 공통 기본 플랫폼을 갖춘 ANA 제품군을 개발했습니다. 개방형 아키텍처의 Kaplan 모듈러 시스템 (호랑이)은 다양한 장비 세트를 수용 할 수 있습니다. 이들은 주로 감시 및 정찰 시스템, 즉석 폭발 장치와 싸우는 시스템이지만 무장 한 구성도 가능합니다.
군대는 미국에서 가장 큰 ANA 사용자이기 때문에 자원 요구를 결정하는 데있어 가장 큰 문제가있을 수 있습니다.
군대는 플랫폼 요구 사항을 웨어러블, 운송 가능, 자체 추진 및 애드온 모듈의 네 가지 범주로 분류했습니다. 또한 소형 무인 항공기를 포함하여 대대 이하의 무인 항공기 용 범용 컨트롤러 개발에 의존합니다. 항공 단지.
Soldier Systems 및 Unmanned Ground Systems의 책임자 인 Stuart Hetfield 중령은 5 년 예산안에 개발 된 모든 프로젝트가 완료되도록 군대가 30 년 동안 사전에 장기적인 필요를 계획했다고 설명했습니다.
이 문제에 대한 군대의 전략적 비전은 향상된 방어력, 전투 안정성 및 생존 가능성을 갖춘 유인 및 유인 그룹으로 구성된 근대화 된 군대의 창설을 의미합니다. 또한 병사들의 육체적,인지 적 부담을 줄이고 새로운 전술을 사용하며 군인의 능력을 향상시킵니다.
Hatfield에 따르면 군대는 계획된 프로그램을 시행하기 전에 선택된 비상 계획을 재건 및 유지함으로써이를 달성 할 것이다. 클래스 내의 균일 성으로 인한 비용 절감; 기성품 상업 기술의 사용; 단위에 자율성을 점진적으로 도입; 마지막으로 사용자 피드백을 통해 기술 개발 프로세스의 핵심 요소입니다.
군대는 모든 일을 현재, 신흥 및 미래의 프로그램으로 나누었으며 각각은 다양한 정도의 준비와 자금 지원을 받았다. 현재 지원되는 작업에는 MTRS Increment 1, RONS 및 M160가 포함되며 신생 요구 사항 (완료 보증 없음)에는 Robotics Enhancement Program (REP)이 포함됩니다.
REP는 Soldier Enhancement Program (SEP)에서 복사되며 2015 해에 시작될 예정입니다. 이 프로그램에서는 육군이 상업적 완성품을 획득하고 평가 후 계획된 프로그램으로의 이행 상태 또는 계획된 프로그램의 콘텐츠 상태를 제공 할 수있는 완성 된 실험 시스템을 얻기위한 자금이 제공 될 것입니다. Hatfield 중령은 이것이 투자 수익없이 너무 많은 시위가 있었다는 업계의 우려 때문이라고 말했다. "이것은 계획된 프로그램에 황금 티켓이 아니지만, 적어도 수행 된 노력에 대한 투자 수익을 약간 내 준다."
다른 단기 (2015-2020) 및 중기 (2012-2030) 표적에는 새로운 마이크로 ANA, 일반 로봇 시스템 - 개별 공통 로봇 시스템 (CRS-I), 전술 전술 로봇 제어기 (TRC) 및 구획 장비를 수송하기위한 다용도 시스템 분대 다목적 장비 운송 (SMET).
TRADOC 교리 개발 및 전투 훈련 부서에서 수행하는 CLARK (Common Lightweight Autonomous Robotics Kit) 일반 조명 로봇 키트 프로그램의 일부로 새로운 마이크로 시스템에서 작업이 진행 중입니다. CLARK 프로그램에서 부서에는 다양한 자율성으로 단거리 정찰을 수행 할 수있는 소형 로봇 시스템 세트가 제공됩니다. 전체 세트에는 무인 접지 센서, 마이크로 ANA 및 마이크로 UAV (자율 특성 포함)가 포함됩니다. 공통 제어기를 포함한 모든 구성 요소의 총 질량은 약 4,5 kg 일 수 있습니다. 반자동 초경량 정찰 로봇 개발 초소형 회귀 로봇 (Ultra Light Recon Robot, ULRR)은 마이크로 ANA의 역할을 수행하도록 설계되었습니다.
CRS-I은 4 월 2013에 문을 닫은 Army Small AHA Program (소형 UGV -SUGV)의 대체품입니다. 군대는 SUGV에 비해 무게가 2 배, 비용이 2 배 적은 시스템을 찾고 있으며이 요구 사항의 승인을 기다리고 있습니다.

Uralvagonzavod의 원격 제어 전투 지원 차량이 러시아 군대에 공급되었습니다.
분리 수준에서 병사를 내리는 것은 무인 시스템에 적용 할 수있는 또 다른 영역입니다. "우리는 SMSS (Lockheed Martin Squad Mission Support System) 차량 운송 시스템을 아프가니스탄에 보냈습니다. 반자동 시스템은 전장에서 병사들을 추적하고 장비를 운반합니다. 그러나 테스트 및 평가 사무소 оружия 군사 장비는 시스템을 신뢰하지 않으므로 반자동 모드에서는 작동하지 않는다고보고했습니다. 그녀는 현장에 도착했고 우리는 즉시 원격 컨트롤러의 배터리가 모두 소모되었다는 불만을 접수했으며 시스템은 작동에 불편했습니다. 음, 시스템 설계에는 단점이있었습니다. 원격 제어가 중복되는 것으로 판명되었는데, 이는 장치가 사용자를 따라 가지 않을 때 사용해야하는 불필요한 모드입니다. 이것은 그와 그의 병사에 대한 인식에 대한 마음을 완전히 바 꾸었습니다. 기구는 군인을 내 렸습니다. 무기를 넣고 원격 제어 장치를 사용하고 시스템을 제어해야하기 때문에 인지력과 신체적 인 노력이 필요합니다. 실제로 시스템을 자체적으로 따라야합니다. 왜 이런 일이 일어 났습니까? 이 시스템을 평가하고 경험 한 사람들은 자신감이 없었기 때문입니다. "
그러나 SMSS 개발은 완료되지 않았으며 시스템은 UAV와 관련된 작업을 포함하여 여러 역할에서 계속 테스트되고 있습니다. ANA와 합병 무인 비행기 미군의 특수 표적이다.
군대 목록에있는 다른 주요 시스템 중에는 높은 이동성 엔지니어 굴삭기 및 RG-1 기계 (둘 다 서로 다른 엔지니어링 장비와 VCA 퇴치 장비가 장착되어 있음)를 원격으로 제어 할 수있는 유형 2 및 31 경로 정리 및 조회 시스템의 경로를 지우는 시스템이 있습니다 Husky Mounted Detection System (HMDS)의 광산 탐지 시스템. HMDS는 안전 거리에서 허스키 복합체의 반자동 제어 시스템이 개발되는 운영 프로그램입니다.
인증 및 기존 보안 조치는 대규모 ANA, 특히 추가 시스템의 배치를 크게 방해 할 수 있습니다. "완벽한 것은 없으며, 무인 지상 시스템과 자율 기계를 절대로 배치 할 수 없으며 문제가없는 운영을 기대합니다. 그러나 우리는 사람과 기계에서 기대하는 것 사이의 문화적 장벽을 극복하기 위해 이러한 신뢰와 확신을 개발해야합니다. "
이로 인해 Autonomous Autobomous Mobility System CDD (현재 Autonomous Convoy Operations - ACO)에 문제가 발생할 수 있습니다. ACO는 기존 승무원 플랫폼을 무인 플랫폼으로 변형 할 수 있도록 설계된 옵션 키트입니다. "나는 이것이 매우 성공적인 프로젝트라고 생각한다. 그러나 문제가있다. 나는 이것이 우리가 이런 방향으로 나아갈 준비가되어 있는지의 맥락에서 기술 문제라고 생각하지 않는다. 테스터들은 사람이있는 트럭을 테스트하는 방법 만 알고 있기 때문에 우리가 어떻게 사용하는지, 어떻게 증명하는지, 어떻게 안전하게 할 것인가에 대한 문제를 봅니다. "라고 Roberson 중령은 설명했다.
군대가 원했던 미래의 많은 기회는 취소 된 FCS (Future of Fighting Systems) 프로그램의 일환으로 개발되었습니다. 이에 따라 일반적인 로봇 플랫폼 인 MULE (Multifunction Utility / Logistics and Equipment)이 개발되었으며 전투 지원 플랫폼을 포함한 다양한 작업을 위해 재구성 될 수 있습니다. FCS 폐지 후, 육군은 무장 로봇 플랫폼 (경량) ARV-A (L) (무장 로봇 식 차량 - 폭행 (조명))의 형태로 전투 판을 개발했으나 선반에 배치되었습니다.
미 육군은 유망한 전술 전투 ANA의 필요성을 유지하지만, 다른 군대에서는 그러한 시스템이 이미 운용 중이다. ANA 회사 인 G-NIUS의 여러 모델이 무기를 사용할 수 있으며 Uralvagonzavod는 추적 시스템을 개발하여 러시아 군대에 배치했습니다.
그것은 직접 및 간접 전투 지원뿐만 아니라 감시 및 정찰을 위해 설계되었습니다. 이 장치에는 자이로가 안정된 무기 설치 장치와 광학 전자 장치 및 적외선 장치가 장착되어 있습니다. 이 회사에 따르면이 장치는 5 km까지의 거리에서 작동 할 수 있으며 최대 35 km / h 속도로 이동할 수 있습니다. 암호화 된 통신 시스템도보고됩니다.
기본 플랫폼의 이동성은 극복해야 할 최첨단 장벽 중 하나 일 수 있지만이 문제에 대한 해결책은 매우 중요합니다. "내 관점에서, 이동성은"플랫폼이 실제로 시스템이 주어지는 유닛이나 병사의 페이스를 유지할 수 있습니까? "라는 질문에 놓여 있습니다 ... ... 나는 광범위하게 보입니다. 나는 시스템에 바퀴, 궤도 또는 다리가 있어야한다고 분명히 말할 수 없다. 이것은 내 사업이 아니며 사업은 상황을보고이 상황에서 작동 할 시스템을 제안하는 것입니다 "라고 Roberson 중령이 말했습니다.
이것은 해병대 다리가있는 지원 시스템의 다리가있는 분대 지원 시스템 (Legged Squad Support System)과 같은 유닛을 지원하도록 설계된 대형 시스템의 경우에만 문제가 될 수 있습니다. 이것은 또한 작은 시스템에도 영향을 미칩니다. Hatfield 중령은 다음과 같이 설명했다. "이동성은 모든 시스템에서 주요 문제인 것처럼 보입니다. 특히 우리가 마이크로 및 나노 수준으로 이동한다는 사실 때문입니다. 마이크로 ANA 또는 버려진 로봇의 경우 장애물이 있지만 미터 또는 2 미터 정도 마루 위로 움직일 수 있다면 많은 것을 할 수 있었고 새로운 세계를 열 수있었습니다. 여기서 공기와 지구의 경계가 사라집니다. "
사후
자동 지상 차량의 미국 시장
이라크와 아프가니스탄에서 병력 철수와 2 월 2013에서 미군의 급진적 인 개정으로 ANA 최종 사용자 시장이 급속히 감소했다. 이 분석에 따르면 2469 ANA를 다른 구조로 이전하고 현대화 및 복원을위한 2700 플랫폼을 떠날 계획입니다.
3 월에는 2014가 M2015, MTRS (Man Transportable Robot System) Inc. II 및 RCIS (Robotic Clearance Integration System) 구매를위한 로봇 전투 지원 시스템 (RCSS) 로봇 전투 소프트웨어의 Pentagon 160 예산에 추가되었습니다. ). 이 계약에는 MTRS의 업그레이드가 포함되어있어 RONS가 너무 큰 상황에서 폭발물의 원격 정찰 및 중화를 수행 할 수있는 기능을 제공했습니다.
업그레이드에는 통신 시스템 및 부적합한 부품 및 구성 요소의 교체가 포함됩니다. 그러나 AEODRS 프로그램 재정에 약간의 변화가있었습니다. 생산 개시일 연기. Increment 1의 솔루션은 2015 중반, 올해의 2016에서 생산을 시작할 계획이었으며, 지속적인 개선 프로그램의 구현은 올해의 2019 말까지 확장되었습니다.
자율 기술이 개발되고 시연 된 로봇 지상 시스템 프로젝트 인 로봇 식지면 시스템 (Robotic Ground Systems)은 자금 조달을 약간 줄였습니다. TS2 / Robotics Technology 프로젝트에서는 로봇이 군사 작업에 기여할 수 있도록하는 자율 기술을 개발, 평가 및 연구하는 프로젝트가 크게 줄어 들었습니다.
TUGV (Tactical Unmanned Ground Vehicle)에 대한 새로운 프로그램이 시작되어 공통 로봇 시스템 Common Robotic System (Individual)의 기능과 로봇 시스템의 개발 및 테스트에 대한 여러 가지 새로운 요구 사항이 통합되었습니다.
이러한 모든 변화의 결과로 시장 규모와 구조가 급격하게 변했습니다. 지난 5 년 동안 이라크와 아프가 니 스탄에서 군사 작전을위한 판매가 지배적이었습니다. 다음 10 년에는 TUGV와 같은 주요 이니셔티브를 위해 계획된 연구 및 개발로 인해 2016에 대한 판매가 크게 늘어날 것으로 예상됩니다. 새로운 세대 모듈 시스템의 대규모 생산이 증가하는 수요를 충족시키기 시작할 것이기 때문에 계획된 10 년 기간의 지난 몇 년 동안 생산량이 증가 할 것으로 추정됩니다.
사용 된 재료 :
www.janes.com
www.dtic.mil
www.auvsi.org
www.irobot.com
www.northropgrumman.com
www.stratom.com
www.uvz.ru
정보