로켓 단지 "알바트 로스"
알바트 로스 대륙간 탄도 미사일 (ICBM)의 개발은 Reutov시에서 엔지니어링 기계 공학 산업의 전문가들에 의해 수행되었습니다. 이 작업은 9의 1987 2 월 소련 내각위원회의 결의로 시작되었습니다. 주요 디자이너는 Herbert Efremov였습니다. 1991에서는이 ICBM의 대량 생산을 시작하기 위해 복잡한 테스트를 시작했으며 1993에서이 계획을 구현 한 적이 없었습니다.
소련의 새로운 미사일 시스템 개발은 계층화 된 미사일 방어 시스템을 극복 할 수있는 능력을 갖추고있어 PIO 프로그램의 일환으로 미국에서 미사일 방어 체제를 창설하는 데 대한 비대칭 대응이되었습니다. 새로운 복합 단지는 극 초음속으로 기동, 기동 (날개) 전투 유닛을받는 것이 었습니다. 이 유닛들은 1000-5,8 km / s 또는 Mach 7,5-17 주위의 속도로 Karman 라인의 대기에 진입 할 때 방위각에서 22 킬로미터까지 기동 할 수 있어야합니다. 알바트 로스 전체 프로젝트의 핵심에는 회피 기동 작전을 수행 할 수있는 유도 전투 유닛 (UBB)에 대한 제안이있었습니다. UBB는 적군의 개입을 막고 프로그램 된 회피 기동을 구현해야했습니다. 이러한 UBB의 정교화 작업은 조만간 소련에서 1979-1980처럼 시작되었으며 그러한 작업은 이러한 미사일 방어 기동의 실행을위한 자동화 시스템을 설계하는 작업으로 수행되었습니다.
새로운 로켓은 3 단계로되어 있었고, 작은 높이에서 목표물에 접근하고 그 근처에서 기동 할 수있는 핵 충전으로 크루즈 블록을 장비 할 계획이었다. 로켓 자체의 요소와 발사를위한 대부분의 요소에는 심각한 레이저 보호 장치가 장착 될 계획이었습니다 оружия 그리고 핵폭발을 시도하여 그의 편에서 반대파의 어떤 수준에서도 적을 때릴 수있는 가능성을 보장한다. 알바트 로스 ICBM의 통제 및 안내 시스템은 자율 관성이었다.

위에서 언급했듯이 프로젝트 개발자는 G. A. Efremov로 임명되었습니다. 동시에, 소련 정부는 그 당시에 미국에서 진행된 미사일 방어 체제를 극복하는 것이 심각한 문제 였기 때문에이 프로젝트에 특별한 국가 중요성을 부여했다. 이러한 배경에서 새로운 전략 단지의 창설은 이전에는 모바일 미사일 시스템 및 고체 추진 미사일로 일 해본 적이없는 기업에게 위임 된 것입니다. 일반적으로 날개 달린 전투 부대의 창설은 완전히 새로운 것이었다.
처음에는 소련의 설계자들이 반자동을 피할 수있는 전투 유닛을 만들 가능성을 모색 중이었고,이 아이디어에서 알바트 로스 미사일 개발 프로젝트가 탄생했습니다. 이 ICBM의 전투 부대는 핵 부대를 수행했을뿐만 아니라 적의 반독점 발사를 적시에 탐지하고 자체 회피 콤플렉스를 활성화해야했습니다. 동시에, 기동은 운동의 궤도의 충분한 예측 불가능 성을 보장하는 것이 매우 다양해야했습니다. 새로운 대륙간 로켓의 특징은 300 km를 넘지 않는 고도에서 코스가 형성되었다는 것입니다. 동시에 발사를 고칠 수도 있었지만 탄도를 정확히 예측하고 미사일 탄두에 대응할 수있는 적절한 방법을 개발하는 것은 불가능했습니다. 미사일에는 핵무기가 장착 된 하나 또는 여러 개의 (정확한 정보가 없음) 계획 크루즈 유닛 (PCB)이 장착되어야했다. 관성으로 PKB는 대기권에서 통제 된 비행을하고 (계획) 넓은 범위의 높이와 방향에서 공격 대상에 도달 할 수있었습니다.
1987이 끝날 무렵, 알바트 로스 ICBM의 초안 디자인은 준비가되었지만, 국방부의 비난을 받았다. 컴플렉스의 디자인은 1989이 시작될 때까지 계속되었습니다. 이 주제에 대한 개발 중단의 주된 이유는 프로젝트에 포함 된 기술적 인 해결책을 동반 한 문제를 포함하여이 프로젝트의시기에 의구심이었습니다. 또한 소련의 붕괴는 프로젝트에 부정적인 영향을 미쳤다.

6 월, NGO G. A. Efremov 총사령관은 NPO 마시 노스 토로 니 (Mashinostroenie)에서 열린 회의에서 알바트 로스 단지를 국가의 전략적 미사일 군대 (이동식 및 광산 기반 유형)를위한 보편적 인 단지로 탈바꿈시킬 제안을했다. 그러나이 제안은 모스크바의 열병학 연구소 (MIT)와 Dnepropetrovsk의 Yuzhnoye Design Bureau와 같은 ICBM의 다른 개발자들로부터 강한 반대를 야기했습니다. 그리고 이미 9 월 1989에서 2 월 9 소련 각료회의 결의안에 두 가지 새로운 미사일 시스템, MIT에서 만든 3 단계 고체 연료 로켓을 기반으로하는 고정식 광산 및 이동식 지상 로켓의 제작을 명령 한 새로운 솔루션이 발행되었습니다. 모바일 토양 단지 "Topol-9". 이 연구 주제는 "Universal"(RT-1987PM2 / 2ECHN2 로켓, 나중에는 Topol-M)입니다. 지뢰 발사대를 기반으로 한 복합 단지는 Yuzhnoye Design Bureau에서 제작되었으며 MIT는 이동식 토양 로켓 단지 개발에 참여했습니다. 8에서 START-65 합의가 끝난 후에 소련 전략적 미사일 부대의 이익을위한 알바트 로스 단지의 활발한 개발이 중단되었지만 UBB 프로토 타입 테스트는 계속되었다. 확인되지 않은 또 다른 공식 정보에 따르면 알바트 로스 단지에 대한 작업은 사전 설계가 국방부의 담당자가 약 1991-1에서 검토 한 후에도 중단되었습니다.
어쨌든 높은 확률로이 복합체의 UBB 프로토 타입의 비행 테스트가 1990-1992 년 동안 수행되었다고 말할 수 있습니다. 발사는 K65М-Р 부스터를 사용하여 Kapustin Yar 테스트 사이트에서 수행되었습니다. 첫 번째 발사는 전투로드의 "분리없이"28 February 1990에서 수행되었습니다. 나중에, 알바트 로스 단지 개발을 이용하여 NPO Mashinostroeniya는 aeroballistic 극 초음속 전투 장비 (AGGB) 4202 프로젝트를 개발하기 시작했습니다.
부분적으로 알바트 로스 ICBM은 극 초음속 부대와 함께 소련 붕괴의 배경에서 발생한 1990 초반에 국가의 군 - 산업 단지의 전반적인 쇠퇴로 희생되었습니다. 그러나이 프로젝트를위한 기존 토대를 사용하는 1990-s의 끝에서 작업이 시작되어 최첨단 Yars 수정 및 기타 탄도 미사일과 관련된 Topol-M 및 극 초음속 유닛이 등장하게되었습니다 새로운 세대로 - "Bulava"와 "Sarmat".
알바트 로스 단지의 기동 전투 유닛에서의 작업은 평화적 목적을 위해 독점적으로 사용되도록 시도되었습니다. 그래서 TsNIIMASH의 전문가들과 함께 NPO 기계 공학자들은 UR-100NUTTB ICBM을 기반으로 Priyv라는 구급차 로켓 공간 콤플렉스를 만들 것을 제안했습니다. 2000-2003 년이 만들어 낸이 단지는 세계 해양의 바다에서 조난중인 바다의 배들에 긴급 응급 처치를 제공하기 위해 사용될 계획이었습니다. 이 ICBM의 탑재물로 특수 항공 우주 구조 항공기 인 ALS-1 및 ALS-2을 탑재 할 계획이었습니다. 이러한 장치의 사용으로 인해 조난중인 선박에 응급 키트를 보내는 속도는 15 분에서 1,5 시간까지이며 착륙 정확도는 ± 20-30 미터입니다. ALS의 유형에 따라화물의 무게는 각각 420 및 2500 kg이었다.
따라서 SLA-1 구조 항공기는 최대 90개의 구명 뗏목 또는 비상 키트를 전달할 수 있었습니다. 그리고 SLA-2 구조 항공기는 해양 선박용 구조 장비(섬프 모듈, 화재 모듈, 잠수 모듈)를 제공할 수 있습니다. 다른 변형에서 - 로봇-구조자 또는 원격 조종 항공기.
정보 출처 :
http://militaryrussia.ru/blog/topic-844.html
http://nevskii-bastion.ru/albatross-rk
http://www.arms.ru/stati/raketno-kosmicheskaja-oborona/proekt-albatros.htm
소련의 새로운 미사일 시스템 개발은 계층화 된 미사일 방어 시스템을 극복 할 수있는 능력을 갖추고있어 PIO 프로그램의 일환으로 미국에서 미사일 방어 체제를 창설하는 데 대한 비대칭 대응이되었습니다. 새로운 복합 단지는 극 초음속으로 기동, 기동 (날개) 전투 유닛을받는 것이 었습니다. 이 유닛들은 1000-5,8 km / s 또는 Mach 7,5-17 주위의 속도로 Karman 라인의 대기에 진입 할 때 방위각에서 22 킬로미터까지 기동 할 수 있어야합니다. 알바트 로스 전체 프로젝트의 핵심에는 회피 기동 작전을 수행 할 수있는 유도 전투 유닛 (UBB)에 대한 제안이있었습니다. UBB는 적군의 개입을 막고 프로그램 된 회피 기동을 구현해야했습니다. 이러한 UBB의 정교화 작업은 조만간 소련에서 1979-1980처럼 시작되었으며 그러한 작업은 이러한 미사일 방어 기동의 실행을위한 자동화 시스템을 설계하는 작업으로 수행되었습니다.
새로운 로켓은 3 단계로되어 있었고, 작은 높이에서 목표물에 접근하고 그 근처에서 기동 할 수있는 핵 충전으로 크루즈 블록을 장비 할 계획이었다. 로켓 자체의 요소와 발사를위한 대부분의 요소에는 심각한 레이저 보호 장치가 장착 될 계획이었습니다 оружия 그리고 핵폭발을 시도하여 그의 편에서 반대파의 어떤 수준에서도 적을 때릴 수있는 가능성을 보장한다. 알바트 로스 ICBM의 통제 및 안내 시스템은 자율 관성이었다.

위에서 언급했듯이 프로젝트 개발자는 G. A. Efremov로 임명되었습니다. 동시에, 소련 정부는 그 당시에 미국에서 진행된 미사일 방어 체제를 극복하는 것이 심각한 문제 였기 때문에이 프로젝트에 특별한 국가 중요성을 부여했다. 이러한 배경에서 새로운 전략 단지의 창설은 이전에는 모바일 미사일 시스템 및 고체 추진 미사일로 일 해본 적이없는 기업에게 위임 된 것입니다. 일반적으로 날개 달린 전투 부대의 창설은 완전히 새로운 것이었다.
처음에는 소련의 설계자들이 반자동을 피할 수있는 전투 유닛을 만들 가능성을 모색 중이었고,이 아이디어에서 알바트 로스 미사일 개발 프로젝트가 탄생했습니다. 이 ICBM의 전투 부대는 핵 부대를 수행했을뿐만 아니라 적의 반독점 발사를 적시에 탐지하고 자체 회피 콤플렉스를 활성화해야했습니다. 동시에, 기동은 운동의 궤도의 충분한 예측 불가능 성을 보장하는 것이 매우 다양해야했습니다. 새로운 대륙간 로켓의 특징은 300 km를 넘지 않는 고도에서 코스가 형성되었다는 것입니다. 동시에 발사를 고칠 수도 있었지만 탄도를 정확히 예측하고 미사일 탄두에 대응할 수있는 적절한 방법을 개발하는 것은 불가능했습니다. 미사일에는 핵무기가 장착 된 하나 또는 여러 개의 (정확한 정보가 없음) 계획 크루즈 유닛 (PCB)이 장착되어야했다. 관성으로 PKB는 대기권에서 통제 된 비행을하고 (계획) 넓은 범위의 높이와 방향에서 공격 대상에 도달 할 수있었습니다.
1987이 끝날 무렵, 알바트 로스 ICBM의 초안 디자인은 준비가되었지만, 국방부의 비난을 받았다. 컴플렉스의 디자인은 1989이 시작될 때까지 계속되었습니다. 이 주제에 대한 개발 중단의 주된 이유는 프로젝트에 포함 된 기술적 인 해결책을 동반 한 문제를 포함하여이 프로젝트의시기에 의구심이었습니다. 또한 소련의 붕괴는 프로젝트에 부정적인 영향을 미쳤다.
6 월, NGO G. A. Efremov 총사령관은 NPO 마시 노스 토로 니 (Mashinostroenie)에서 열린 회의에서 알바트 로스 단지를 국가의 전략적 미사일 군대 (이동식 및 광산 기반 유형)를위한 보편적 인 단지로 탈바꿈시킬 제안을했다. 그러나이 제안은 모스크바의 열병학 연구소 (MIT)와 Dnepropetrovsk의 Yuzhnoye Design Bureau와 같은 ICBM의 다른 개발자들로부터 강한 반대를 야기했습니다. 그리고 이미 9 월 1989에서 2 월 9 소련 각료회의 결의안에 두 가지 새로운 미사일 시스템, MIT에서 만든 3 단계 고체 연료 로켓을 기반으로하는 고정식 광산 및 이동식 지상 로켓의 제작을 명령 한 새로운 솔루션이 발행되었습니다. 모바일 토양 단지 "Topol-9". 이 연구 주제는 "Universal"(RT-1987PM2 / 2ECHN2 로켓, 나중에는 Topol-M)입니다. 지뢰 발사대를 기반으로 한 복합 단지는 Yuzhnoye Design Bureau에서 제작되었으며 MIT는 이동식 토양 로켓 단지 개발에 참여했습니다. 8에서 START-65 합의가 끝난 후에 소련 전략적 미사일 부대의 이익을위한 알바트 로스 단지의 활발한 개발이 중단되었지만 UBB 프로토 타입 테스트는 계속되었다. 확인되지 않은 또 다른 공식 정보에 따르면 알바트 로스 단지에 대한 작업은 사전 설계가 국방부의 담당자가 약 1991-1에서 검토 한 후에도 중단되었습니다.
어쨌든 높은 확률로이 복합체의 UBB 프로토 타입의 비행 테스트가 1990-1992 년 동안 수행되었다고 말할 수 있습니다. 발사는 K65М-Р 부스터를 사용하여 Kapustin Yar 테스트 사이트에서 수행되었습니다. 첫 번째 발사는 전투로드의 "분리없이"28 February 1990에서 수행되었습니다. 나중에, 알바트 로스 단지 개발을 이용하여 NPO Mashinostroeniya는 aeroballistic 극 초음속 전투 장비 (AGGB) 4202 프로젝트를 개발하기 시작했습니다.
부분적으로 알바트 로스 ICBM은 극 초음속 부대와 함께 소련 붕괴의 배경에서 발생한 1990 초반에 국가의 군 - 산업 단지의 전반적인 쇠퇴로 희생되었습니다. 그러나이 프로젝트를위한 기존 토대를 사용하는 1990-s의 끝에서 작업이 시작되어 최첨단 Yars 수정 및 기타 탄도 미사일과 관련된 Topol-M 및 극 초음속 유닛이 등장하게되었습니다 새로운 세대로 - "Bulava"와 "Sarmat".
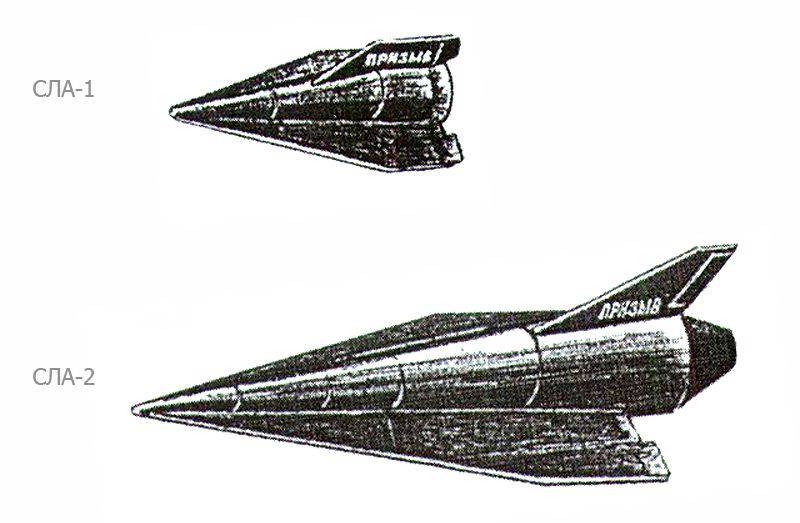
도면 장치 ALS-1 및 ALS-2 시스템 "호출"
알바트 로스 단지의 기동 전투 유닛에서의 작업은 평화적 목적을 위해 독점적으로 사용되도록 시도되었습니다. 그래서 TsNIIMASH의 전문가들과 함께 NPO 기계 공학자들은 UR-100NUTTB ICBM을 기반으로 Priyv라는 구급차 로켓 공간 콤플렉스를 만들 것을 제안했습니다. 2000-2003 년이 만들어 낸이 단지는 세계 해양의 바다에서 조난중인 바다의 배들에 긴급 응급 처치를 제공하기 위해 사용될 계획이었습니다. 이 ICBM의 탑재물로 특수 항공 우주 구조 항공기 인 ALS-1 및 ALS-2을 탑재 할 계획이었습니다. 이러한 장치의 사용으로 인해 조난중인 선박에 응급 키트를 보내는 속도는 15 분에서 1,5 시간까지이며 착륙 정확도는 ± 20-30 미터입니다. ALS의 유형에 따라화물의 무게는 각각 420 및 2500 kg이었다.
따라서 SLA-1 구조 항공기는 최대 90개의 구명 뗏목 또는 비상 키트를 전달할 수 있었습니다. 그리고 SLA-2 구조 항공기는 해양 선박용 구조 장비(섬프 모듈, 화재 모듈, 잠수 모듈)를 제공할 수 있습니다. 다른 변형에서 - 로봇-구조자 또는 원격 조종 항공기.
정보 출처 :
http://militaryrussia.ru/blog/topic-844.html
http://nevskii-bastion.ru/albatross-rk
http://www.arms.ru/stati/raketno-kosmicheskaja-oborona/proekt-albatros.htm
정보