Kant Baltic Federal University의 과학자들은 "바퀴벌레"로봇을 만들었습니다.
Immanuel Kant Baltic Federal University의 과학자들은 그들의 발전을 다음과 같은 형식으로 발표했습니다. 로봇- "곤충". 미니어처 로봇은 바퀴벌레를 모방합니다. 개발자들은 "곤충"이 정찰 목적과 잔해 아래에서 사람을 찾는 데 사용될 수 있다고 보고합니다. BFU 웹사이트 로봇 제작에 참여한 실험실 대표의 진술을 인용합니다.

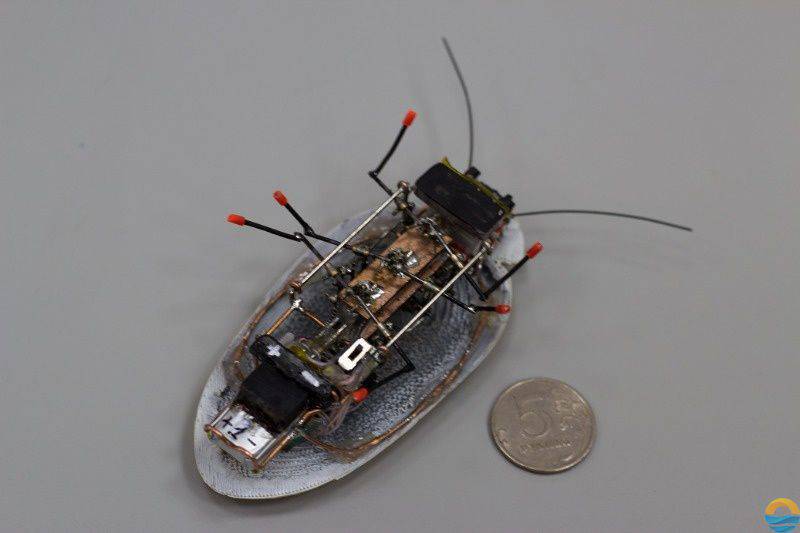
Blaberus Giganteus 속을 대표하는 바퀴벌레가 살아있는 템플릿으로 선택되었습니다. 이 곤충은 중남미에 산다. Blaberus Giganteus의 개인은 평균 크기가 약 7-8cm이지만 개별 표본은 10-11cm까지 자라며 Kaliningrad 과학자의 개발은 길이가 10cm 미만입니다.
로봇 바퀴벌레의 수석 디자이너 Alexei Belousov는 다음과 같이 말했습니다.

BFU 수석 엔지니어 Danil Borchevkin:
BFU에서 생성된 로봇 바퀴벌레의 속도는 0,3m/s입니다. 이것은 이 속의 실제 바퀴벌레의 속도보다 약 3배 느립니다.
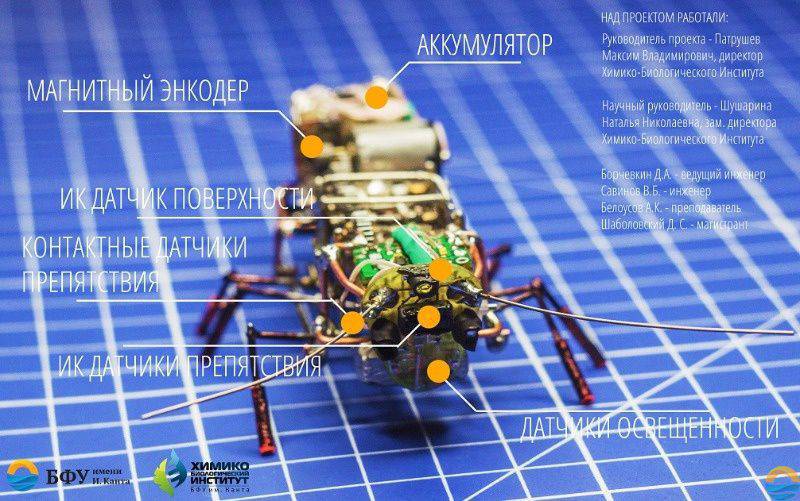
로봇 바퀴벌레에는 감광 센서, 장애물을 감지하고 회피하기 위한 접촉 및 비접촉 센서 시스템이 장착되어 있습니다.
PS 잠재적인 적은 '슬리퍼 로봇'을 만들어야 할까요?..
Immanuel Kant Baltic Federal University의 과학자와 엔지니어의 노력으로 단 하나의 실험실에서 생체 영감을 받은 로봇 바퀴벌레가 만들어졌습니다. 그것에 대한 작업은 7 개월 동안 지속되었습니다. 고객은 러시아 조직으로, 참고로 로봇은 가능한 한 바퀴벌레 모양이어야 한다고 말했습니다. 실제로 이는 다음을 의미합니다.
1) 로봇은 외형적으로 바퀴벌레 유형 중 하나와 유사해야 하며 물리적 치수와 일치해야 합니다.
2) 로봇의 크기는 바퀴벌레 유형 중 하나와 일치해야 합니다.
3) 로봇의 "행동"은 가능한 한 바퀴벌레의 자연스러운 행동에 가까워야 합니다.
1) 로봇은 외형적으로 바퀴벌레 유형 중 하나와 유사해야 하며 물리적 치수와 일치해야 합니다.
2) 로봇의 크기는 바퀴벌레 유형 중 하나와 일치해야 합니다.
3) 로봇의 "행동"은 가능한 한 바퀴벌레의 자연스러운 행동에 가까워야 합니다.
Blaberus Giganteus 속을 대표하는 바퀴벌레가 살아있는 템플릿으로 선택되었습니다. 이 곤충은 중남미에 산다. Blaberus Giganteus의 개인은 평균 크기가 약 7-8cm이지만 개별 표본은 10-11cm까지 자라며 Kaliningrad 과학자의 개발은 길이가 10cm 미만입니다.
로봇 바퀴벌레의 수석 디자이너 Alexei Belousov는 다음과 같이 말했습니다.
아마도 가장 어려웠던 점은 이 세 가지 포인트 사이의 균형을 찾는 것이었을 것입니다. 예를 들어, 버클리 대학에서 4년 동안 바퀴벌레 연구를 해왔지만 로봇을 바퀴벌레 동형으로 만드는 작업이 없어서 우리보다 빠르지만 이동 중에 켜는 방법을 모르고 진짜 바퀴벌레처럼 보이지 않습니다. 그리고 고객은 바퀴벌레 로봇을 만들고 마감일과 예산을 맞추는 것과 같은 작업을 우리에게 설정했습니다.
BFU 수석 엔지니어 Danil Borchevkin:
이 프로젝트를 진행하면서 우리는 두 가지 글로벌 목표를 세웠습니다. 첫째, 생의학 응용을 위한 소형 기계 시스템의 개발, 설계 및 생산을 위한 방법, 방법 및 방법을 개발합니다(이는 미세 기계, 소형 전자 장치 및 높은 자율성이 필요한 사이버 보철, 사지 교체 등입니다). 그리고 두 번째 목표는 다른 작은 전기 기계 시스템을 개발할 때 어떤 기술적 장벽을 극복해야 하는지, 얼마나 많은 기술이 필요한지, 스스로 할 수 있는 것은 무엇인지, 무엇을 주문하고 구매할 수 있는지 알아내는 것입니다. 구성 요소를 찾는 것이 매우 어렵다는 것이 밝혀졌습니다. 많은 일을 손으로 해야 했다. 예를 들어 오스트리아에는 다리용 드라이브를 만드는 회사가 있지만 바퀴벌레 한 마리를 위한 키트 비용은 약 600 루블인 반면 전체 프로젝트에 대한 예산은 1,5만 루블에 불과합니다.
BFU에서 생성된 로봇 바퀴벌레의 속도는 0,3m/s입니다. 이것은 이 속의 실제 바퀴벌레의 속도보다 약 3배 느립니다.
로봇 바퀴벌레에는 감광 센서, 장애물을 감지하고 회피하기 위한 접촉 및 비접촉 센서 시스템이 장착되어 있습니다.
PS 잠재적인 적은 '슬리퍼 로봇'을 만들어야 할까요?..
정보