ISS에 "Andronaut"가 나타납니다.

러시아 과학자들은 국내 최초의 창조 작업을 마무리하고 있습니다. 로봇국제 우주 정거장 작업 조수.
의인화 된 로봇 시스템 "Andronaut"는 11 월 10 우주 비행사 훈련 센터에서 열린 XI 국제 과학 및 실용 회의 "파일럿 우주 여행 (Piloted Space Travel)"의 틀에서 제시되었습니다. 유. 아. 스타 시티의 가가린.

그들은 로봇을 "Andronavt"라고 불렀습니다. 그의 신장 1 m 90 cm, 그는 넓은 어깨 - 잘 생긴 남자 ( "남자"! 여성 주의자는 이미 신음하고있다). 그것의 특질은 그것이 의인화 된 것입니다. 즉, 그 구조에서, 구조는 사람과 흡사합니다. 그리고 이것이 그의 큰 장점입니다.

개발자 : Gagarin Cosmonaut Training Center 및 Federal State Unitary Enterprise TsNIImash Institute of Industry는 물론 Roscosmos 우주 비행사의 전문가입니다.
"ISS에서 조수 로봇의 등장은 한편으로는 우주 비행사의 활동을 해소하고, 다른 한편으로는"전문 환경 "과 조종사 인 보조 로봇 사이에 새로운 참가자가 나타날 것이기 때문에 시스템을 복잡하게 만들 수 있습니다. 따라서이 분야에서는 로봇과 사람 사이의 상호 작용 시스템을 연구하는 분야에서 추가적인 지식을 제공 할 수있는 인체 공학적 연구가 필요합니다. "CPC의 과학 부서의 부국장 인 CPC의 프로젝트 관리자 이고르 소킨 (Igor Sokhin)은 말했다.

"Andronavt"는 로봇 시스템의 후자 범주를 말하며 운영자가 원격으로 제어 할 수 있습니다. 예를 들어, 특별한 의상 (외골격)을 입은 달 착륙대의 밀폐 된 칸막이에있는 승무원은 달 표면의 먼 거리에있는 로봇을 제어 할 수 있습니다.
로봇은 우주 비행사에게 장비를 전달하는 등의 실험을 수행 할 때 기계적으로 반복되는 작업을 수행합니다.
로봇의 제어는 Mission Control Center 운영자가 지상에서 수행 할 수도 있습니다. 자동 모드에서 보조 로봇은 우주 비행사에게 필요한 도구를 제출하는 등 다양한 비행 조작을 수행하는 데 승무원을 지원해야합니다. 멀티 모드 인터페이스를 갖춘 Andronaut는 정보 지원도 제공 할 수 있습니다. 운영자는 질문을하고 음성 메시지를 사용하여 답변을 얻거나 태블릿의 멀티미디어 텍스트를 읽을 수 있습니다. 정보 제공의 "힌트"외에도 "Andronavt"에 승무원들을위한 심리적 지원을 제공하는 문제가 해결되고 있습니다.
이제 ISS는 실험 플랫폼으로 사용되며, 특히 로봇 기술이 개발되고 있습니다.

예를 들어, ISS에 설치된 캐나다 로봇 복합 단지 인 "Kanadarm"은 대형 구조물을 운반하기 위해 "작업 중"입니다.

"Cargo boom"(GST)은 화물칸 및 우주 비행사를 역 외면을 따라 이동시키는화물 크레인입니다. 소련 / 러시아어 미르 역에서 사용되며 ISS의 러시아 분파에서 사용됩니다.
두 크레인. 둘 다 Pier 모듈에 설치되었습니다. 첫 번째 항공기는 STS-96 항공기, 두 번째 항공기 인 STS-101에서 인도되었습니다. 그런 다음 부두의 임박한 삶의 끝을 고려하여 크레인을 검색 및 Zarya 모듈의 표면으로 옮겼습니다 (2012 년).

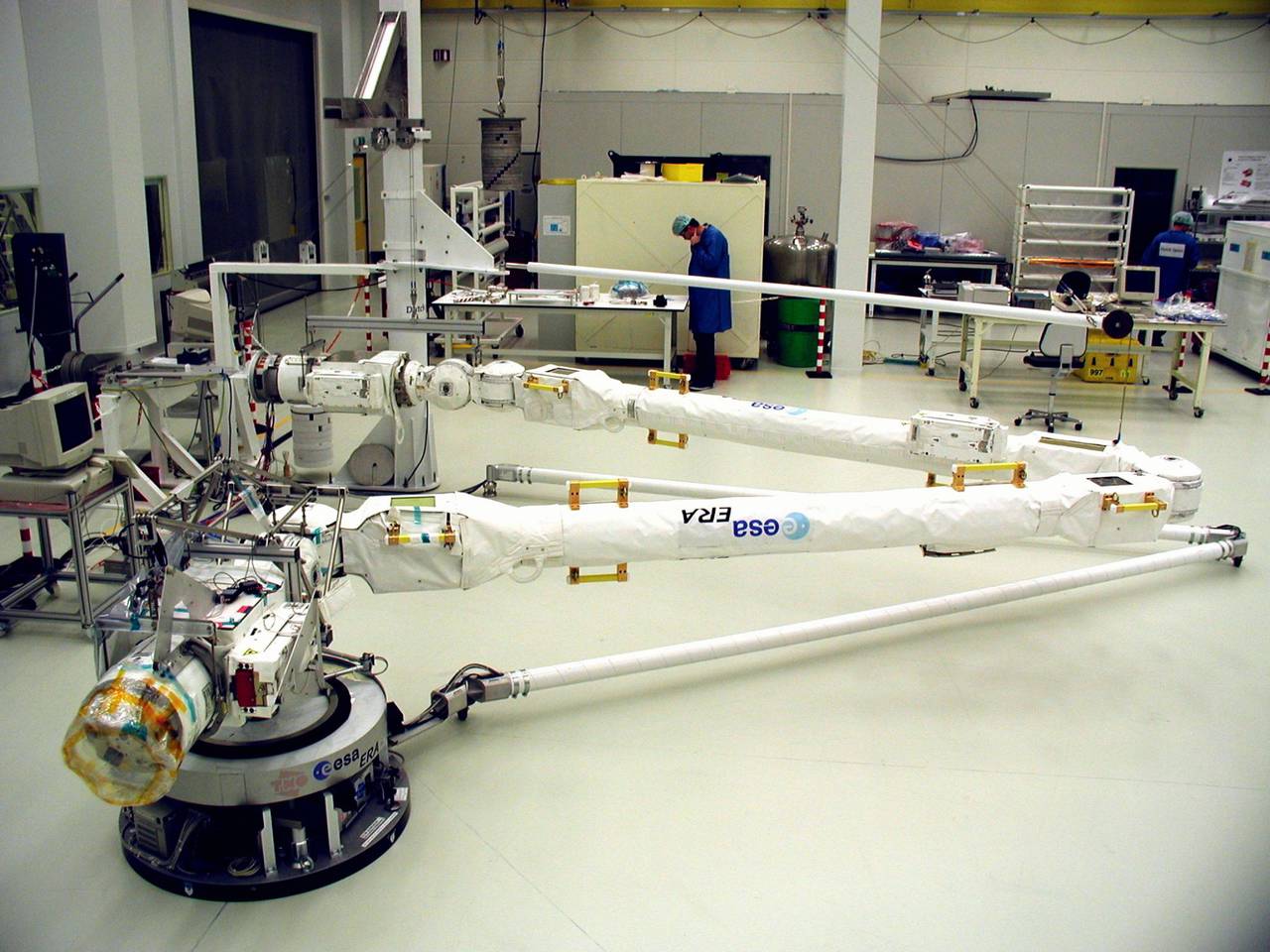
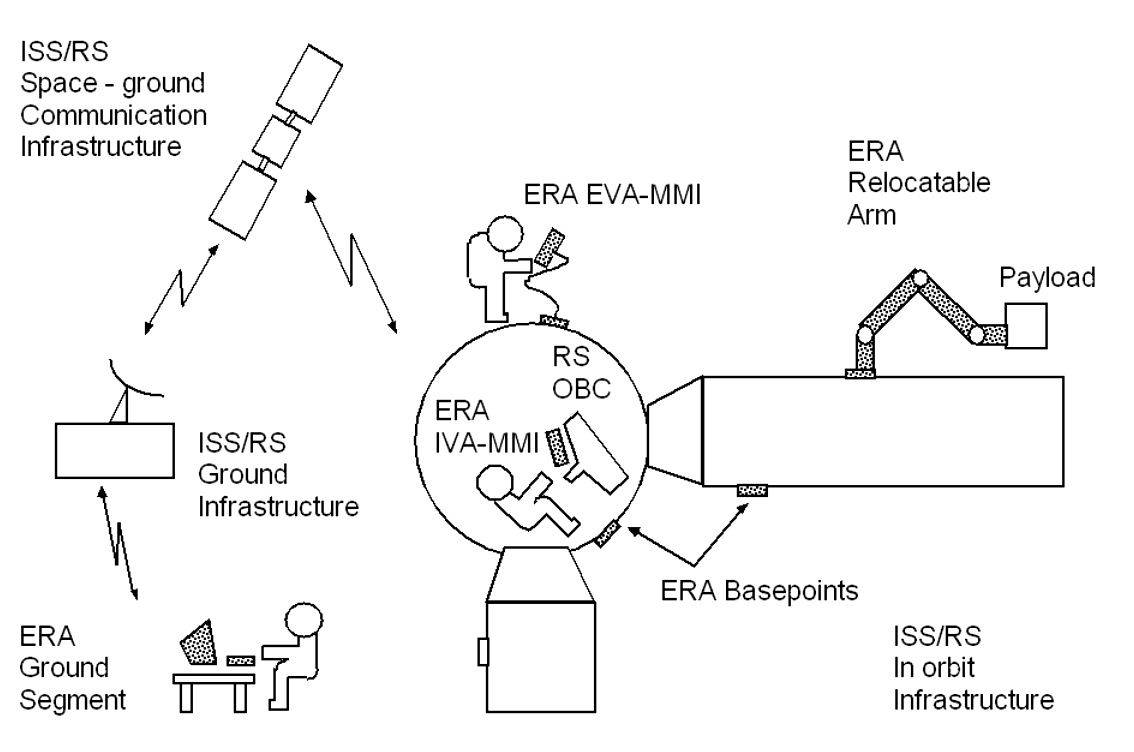
유럽 ERA 조작기는 새로운 모듈 인 FGB-2을 기반으로 Khrunichev State Research and Production Space Center에서 만든 다기능 실험실 모듈 "과학"을 새로 도입했습니다. 기본 부착 점과 조작자 제어 장치가 포함됩니다.
그가 여전히 지구에 있다는 것은 유감 스럽습니다 ( "Columbia"계획의 재앙으로 인해 변경되었습니다).
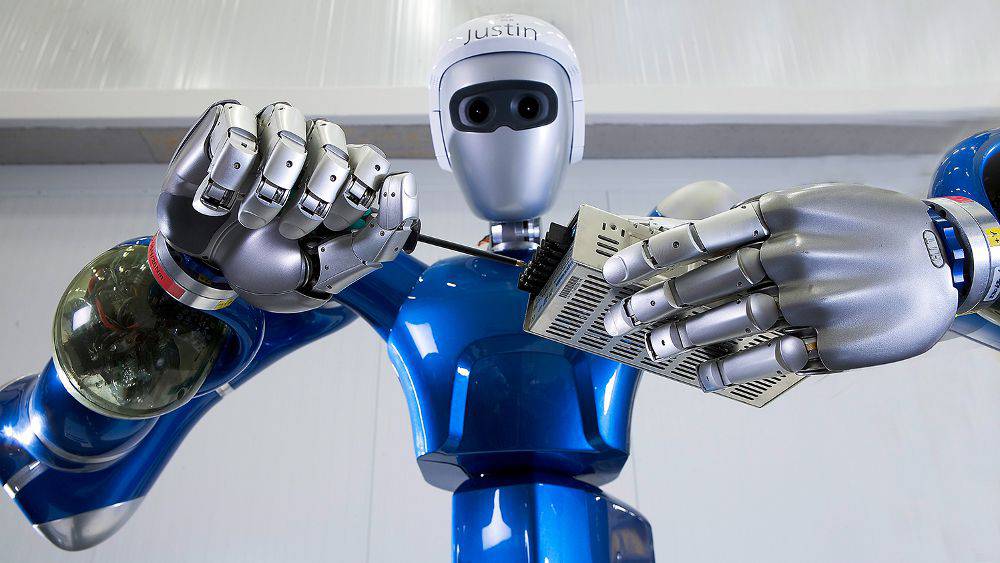
Robonaut 2은 NASA와 General Motors가 개발 한 휴머노이드 로봇입니다. 그것은 다리가없는 휴머노이드 인물로 머리는 금색 페인트로 칠해져 있으며 몸통은 흰색이다. 로 보우의 손에 인간처럼 관절이있는 다섯 손가락. 이 기계는 물건을 쓰거나 쥐거나 접을 수 있으며 무거운 물건을 들고있을 수 있습니다 (예 : 9 kg의 덤벨). 로봇에는 아직 하체가 없습니다. R2 헬멧에는 4 대의 비디오 카메라가 장착되어있어 로봇이 우주에서 방향을 지정할뿐만 아니라 디스패처의 모니터로 신호를 전송합니다. 또한 헬멧에는 적외선 카메라가 있습니다. 350을 통한 센서 및 센서의 총 개수입니다. 로봇의 목에는 3 개의 자유도가 있으며 각 팔은 244 cm의 스팬이 7입니다. 브러시 장치에는 12 자유도가 있습니다. 각 손가락은 최대 2,3 kg을 유지합니다. 로봇의 "뱃속"에는 38 프로세서 PowerPC가 포함 된 컴퓨팅 센터가 있습니다. 로봇의 구조는 주로 알루미늄과 강으로 만들어집니다. Robonaut 2의 무게는 150 kg이고 높이는 1 m입니다. 에너지 시스템이있는 배낭이 로봇의 뒷면에 있습니다.
Robonavt-2은 우주 왕복선 STS-24 디스커버리에 탑승 한 올해 2 월 2011에서 ISS 133에 갔으며 영구적으로 역에서 운영 할 것입니다.
로봇을 발사하는 목적은 무중력 조건에서 우주와 전자기장의 영향을 연구하기 위해 로봇의 기능을 테스트하는 것입니다.
14 April 2014, 미국 우주국 (NASA)은 다리를 robNaw에 보내야합니다. 흥미로운 점은 다리가 휴머이드 로봇에 부착 된 후 전체 높이가 2,7 미터가된다는 것입니다. 로봇의 각 다리에는 7 개의 연결부가 있습니다.

그러나 지금까지, 내 지식으로는, 이것은 (말단의 전달) 일어나지 않았습니다.
일부 역사 국내 코스모 로트
"Lyappa"- 소비에트 우주 정거장 "Mir"의 조립 과정에서 사용 된 대형 기계 조작기. 매니퓰레이터는 스테이션의 조립 된 모듈에 직접 부착되었습니다. "Kvant-2", "Crystal", "Spectrum"및 "Nature"모듈 각각에는 하나의 lyappy가 장착되었습니다.

조작자는 90 °로 회전 할 수 있도록 스테이션 모듈을 재배치하는데도 사용되었습니다.
NGO "Android 기술"의 SAR-401.


아바타 제어의 원리는 특별한 슈트를 입고있는 작업자의 움직임을 반복하는 것입니다 (SAR-401의 경우, 복사 형 마스터 장치 UKT-3가 사용됩니다).
2013는 지상 조건에서 ISS와 지구에서 로봇을 제어하는 비상 시나리오에서부터 다양한 제어 시나리오가 개발되고 있습니다. 그것은 유감스러운 일이지만, 여전히 비공식적 인 선택입니다.
주제의 비디오 : 5의 Top 2015 Humanoid Robots.
사용 된 재료, 사진 및 비디오 :
http://robotrends.ru
http://chrdk.ru
http://trinixy.ru
http://www.gctc.ru/
http://v-kurse.ru/
www.youtube.com
en.wikipedia.org
en.wikipedia.org
http://robonaut.jsc.nasa.gov/mobility
정보