로봇의 첫 번째 공격

정확하게 100 년 전, 무인 원격 제어 전투 차량을 다른 군용 차량에 비해 처음으로 비교적 성공적으로 사용했습니다. 독일의 고속 수중익선 Fernlenkbot (해안에서 철선으로 제어 됨)은 벨기에 해안의 봉쇄에 참여한 영어 모니터 Erebus를 때렸다.
이 범위 оружия 그것이 20 킬로미터였습니다 - 그것이 전선의 길이였습니다. 그러나 그런 거리에서 작은 12 미터 보트를 조종하는 것은 불가능합니다. 단순히 보이지 않는 곳입니다. 따라서 공격은 Fernlenkobot의 방향에 대한 데이터가 라디오를 통해 제어판에 전송 된 수상 비행기와 함께 수행되었습니다. 이 데이터에 따라 운전자가 코스 조정을했습니다.
이 시스템은 상당히 복잡하고 관성적 인 것으로 판명되었지만, 글라이더는 선체 중앙의 "에레 버스"로 추락했습니다. 접촉 퓨즈가 700 킬로그램의 충전량을 소진했지만 모니터가 가라 앉지 않았습니다. 그는 폭파의 에너지를 사용하는 측면을 따라 강화 된 어뢰 방지 케이슨에 의해 구원 받았습니다. 자체 전력으로 "에레 버스"는 수리를 위해 항구로 갔다.
FernLenkbot은 Siemens가 1915에서 개발했습니다. 독일 해군의 명령에 따라, 같은 해 12의 실험용 배치가 만들어 졌는데 그 중 일부는 서쪽 전선으로, 그 중 일부는 플랜더스로, 나머지는 동부 Kurland로 보내졌습니다. 그 (것)들을 사용하는 첫번째 시도는 년의 24에 1916이라고 표시되었다, 그러나 그 후에, 조종 실패 때문에, 배는 자기 파괴하는 명령을 주어 져야했다.
수면 비행으로 인한 다음 해의 25 9 월 1916는 엔진을 실속 시켰고 적의 포획을 피하기 위해 다시 파괴되어야했습니다. 1 March 올해의 1917 - 첫 번째 성공 인 군함에서 관리 한 "Fernlenkbot"은 뉴 포트 항의 입구를 지키고있는 영국 연안 배터리를 훼손했습니다. 9 월 6에서 다른 배는 영국 봉쇄 모니터를 공격했지만 시간이 지나면 발견되었고 빠른 발사 탄광으로 격침되었습니다. 11 월 3이 찍은 리가 만에서 러시아 구축함을 공격하려는 시도도 끝났다.
1918에서는 남은 "Fernlencotts"가 수력 발전소에서 "순수한"무선 지침으로 변환되었습니다. 5 월의 25는 "라디오 크루저 (radio-cruiser)"공격으로 발사되었지만 포수 비행기의 라디오 방송국이 고장난 결과로 성공하지 못했습니다. 통제되지 않은 글라이더가 표적을 지나쳐 미끄러 져서 자기 살인범이 움직였다.
일반적으로 "Fernlenkoboty"는 시간보다 훨씬 앞서 있습니다. 아이디어는 좋았지 만 그 당시의 기술의 신뢰성 부족과 디버깅 시간 부족으로이 아이디어가 완전히 실현되지 않았습니다.
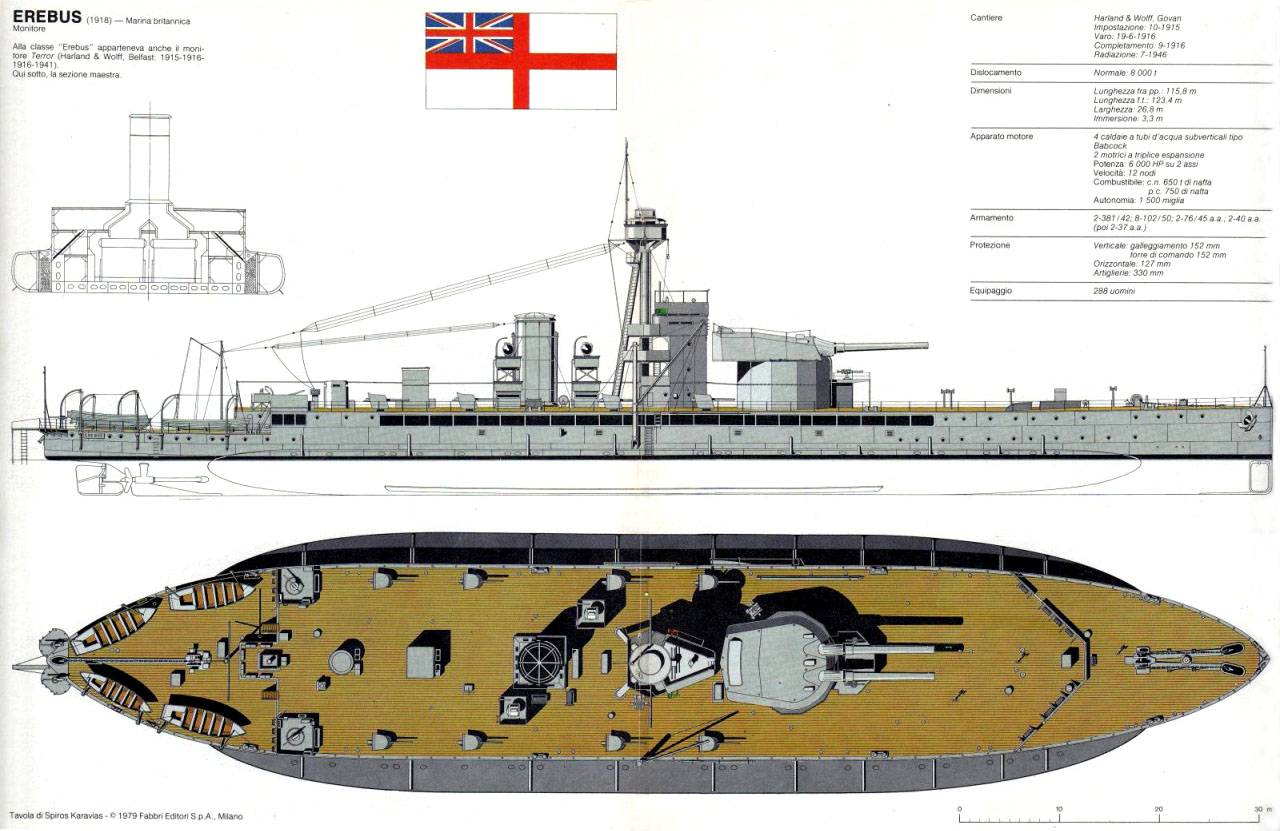
화면 보호기 - "Fernlenkobot"의 이미지, 그런 다음 - 어뢰 방지 케이슨 (anti-trapedo caissons)을 사용한 "에레 버스 (Erebus)"그리기와 같은 모니터의 전후 스냅 샷.

정보