경험 많은 전 지형 차량 ZIL-135Sh
수년간, 식물의 특별한 디자인 국. I.A. Likhachev는 초 기동성 설계를 개발했습니다. 이 기계의 주된 고객은 국방부 였지만 일정 시간이 지나면 다른 부서가 그러한 역할을하기 시작했습니다. 그래서, 60 년대 초반, SKB ZIL은 우주 산업의 기업들과 협력하기 시작했습니다. 그의 가장 흥미로운 결과 중 하나는 경험있는 ZIL-135Sh 전 지형 차량이었습니다.
60 년대 중반에 이르기까지 소련 우주 계획은 일정한 병참 문제를 겪었다. 우주 로켓은 Kuibyshev (현재 Samara)시의 Progress 공장에서 건설되었으며, 그 후 바이 코 누르 우주 센터로 레일을 통해 분해 된 형태로 인도되어 최종 조립 및 발사 준비가 이루어졌습니다. 토크는 P-7 플랫폼을 기반으로하는 발사체에 관한 것이었지만 그러한 방법은 받아 들일 만하다. 그러나, 증가 된 차원을 특징으로하는 "달의 (heunar)"로켓 인 H-1의 개발은 이미 진행 중이다. 우주선에 우주선을 인도하는 것은 심각한 문제와 관련이 있습니다.

매립시 ZIL-135Sh 견본 샘플. 사진 러시아 - 힘 .Rf
철도 운송의 대안을 고려하여 OKB-1 전문가 (S.P. 여왕은 바이 코 누르 (Baikonur)에게 미사일 골재 배달 원본을 제공했다. 이 단계들은 쿠비 셰프 (Kuibyshev)에 건설 될 것을 제안 받았고, 그 후 볼가 (Volga)와 카스피해 (Caspian Sea)를 따라 특수 부두를 따라 구 레이프 (Guryev)시 (현재 카이로의 아티 라우 (Atyrau))로 운반되어야합니다. 그곳에서, 로켓 기술은 특수 수송선에 다시 탑재 될 계획이었고 육지로 우주 비행선으로 배달되었습니다. 이러한 제안을 이행하기 위해서는 수용 가능한 특성을 가진 하천 부선 및 육상 차량을 만드는 것이 필요했습니다. 육로 운송의 경우 설계자의 임무는 미래 H-1의 개별 단위가 적어도 20-25 t의 무게를 가질 수 있다는 사실 때문에 복잡했습니다.
V.P.로 이끄는 OKB-1 엔지니어 그룹. 페트 로프 (Petrov)는 미래 운송업자의 대략적인 모습을 형성하고 몇 가지 중요한 제안을했다. 따라서, 수용 가능한 이동성과 기동성을 보장하기 위해, 상기 기계는 항공기의 기수 부상기에 사용되는 유형의 방향성 휠을 필요로했다. 동시에, 카자흐스탄 SSR의 대초원에서 기동성과 이동성의 원하는 특성은 적어도 1,5 m의 직경을 가진 바퀴를 사용해야 만 얻을 수 있습니다. 이러한 섀시에서는 미래의 컨베이어가 허용되는 치수를 얻고 원하는 부하 용량을 나타낼 수 있습니다.
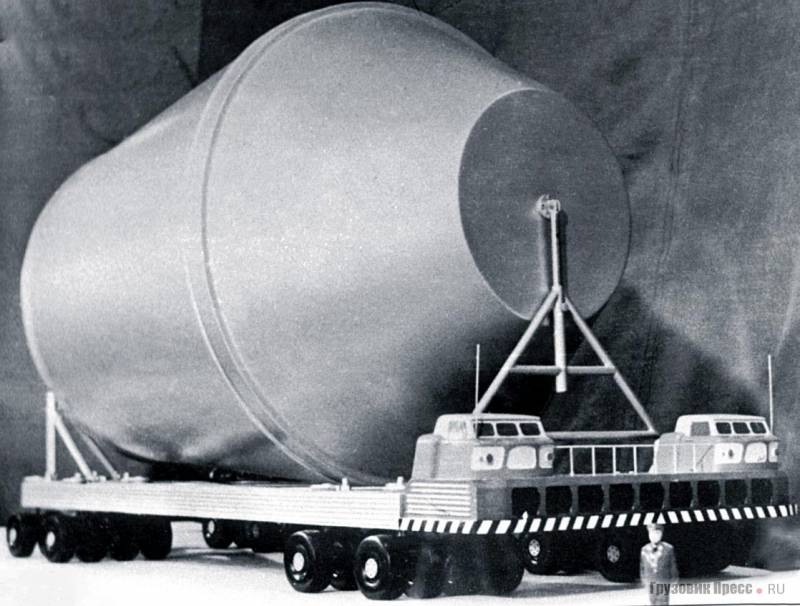
페이로드가있는 장래의 풀 사이즈 컨베이어의 레이아웃. Gruzovikpress.ru의 사진
장래의 로켓 컨베이어의 대략적인 외관을 형성 한 OKB-1은 본격적인 프로젝트의 개발자를 찾기 시작했습니다. 동시에 몇몇 국내 자동차 공장에는 필요한 경험이 있었지만 모두가 "우주"디자이너의 제안에 열광적으로 반응하지는 않았습니다. 그래서 NAMI 연구소와 민스크 자동차 공장은 복잡한 프로젝트에 참여하지 않았습니다. 개발에는 너무 많은 시간이 할당되지 않았습니다.
SKB ZIL은 V.A가 이끄는 상황을 살폈습니다. Grachev. 새로운 차량 개발에 전념 한 회의에서 그는 필요한화물의 4 배인 100 t까지 무게를 측정하는화물을 운송 할 수있는 특수 기계를 만들 준비가되었음을 표명했습니다. 간단한 계산은 장래의 전 지형 차량이 H-1 로켓의 두 번째 또는 세 번째 단계를 전적으로 수행 할 수 있음을 보여주었습니다. 크고 무거운 첫 단계는 단지 세 부분으로 분해 될 수 있습니다.
따라서 바이 코 누르 (Baikonur) 로켓트의 모든 요소를 수송하기 위해서는 5 ~ 6 개의 수송기 비행이 필요했고 그 이후 로켓 조립을 시작할 수있었습니다. 철도 운송의 경우 전체 에셜론이 필요했고 어셈블리가 훨씬 오래 걸립니다.
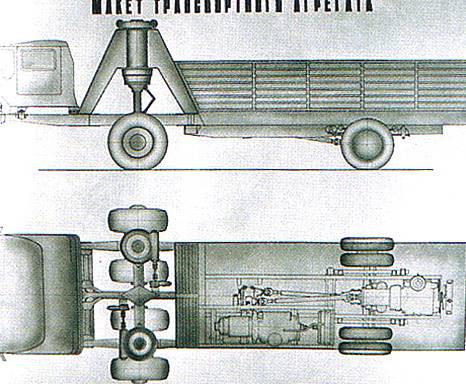
체계는 ZIL-135Sh를 경험했다. 러시아의 힘.
곧 공식적으로 새 프로젝트를 시작한 수많은 문서가 나왔습니다. 우주 산업 운송 업체의 수석 개발자가 SKB ZIL로 임명되었습니다. 특수 전기 시스템의 설계는 SKB Moscow Plant No. 467에 맡겼다. F.E. Dzerzhinsky. OKB-1은 기술 사양 준비, 작업 조정 및 관리 성격의 지원을 담당했습니다.
1967 초기에 여러 기업이 공동으로 미래의 운송 업체 형태를 형성했습니다. 크기가 10,8х21,1 m 인화물 플랫폼을 갖춘 자동차를 만드는 것이 제안되었습니다. 섀시에는 휠 수식 32х32가있는 8 축 디자인이 있어야합니다. 바퀴는 스위블 필러에 쌍으로 설치하도록 제안되었습니다. 케이스의 각 모서리에 4 개의 랙을 장착하십시오. 이 설계로 인해 섀시는 최고의 기동성을 제공 할 수 있습니다. 총중량은 80-100 t에 도달 할 것이고, 약속 된 100 t 근처의 가반 하중을 가할 것입니다.
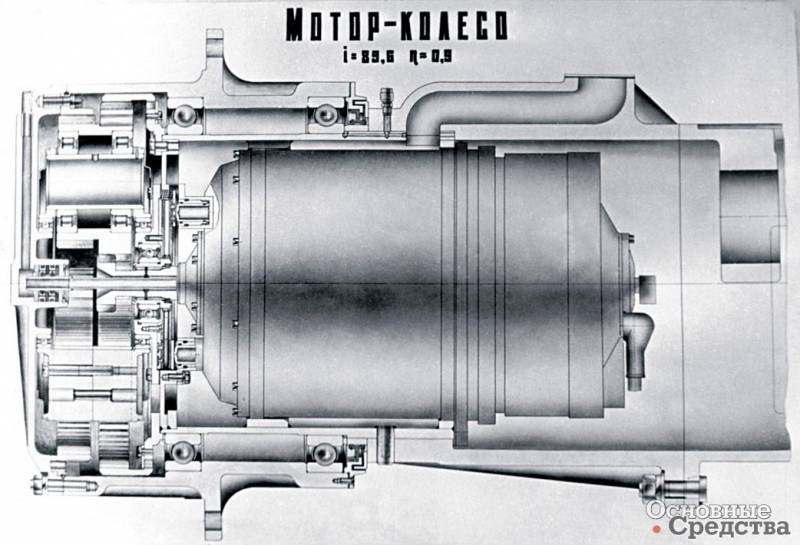
엔진 DT-15M이있는 계통 모터 휠. Figure Os1.ru
전체 컨피규레이션에서 경험이 풍부한 컨베이어의 구조가 아직 이해가되지 않았다는 것은 명백합니다. 본격적인 프로젝트를 개발하기 전에 단순한 구성으로 목업 샘플을 작성, 빌드 및 테스트 할 것을 제안했습니다. 섀시 측면에서 볼 때,이 차는 풀 사이즈 컨베이어의 8 분의 1 정도였습니다. 감소 된 장비의 도움으로 주요 아이디어와 해결책을 검증하고 특정 결론을 도출하고 기존 프로젝트를 변경할 수있었습니다.
미리 만들어진 구성 요소와 어셈블리를 사용하여 프로토 타입 모델을 만드는 것이 제안되었습니다. 구성 요소의 주요 출처는 ZIL-135 제품군의 모든 지형 차량이었습니다. 예를 들어, 전기 변속기는 ZIL-135E 전 지형 차량의 단위를 기준으로했습니다. 이와 관련하여 실험 장비는 ZIL-135Sh ( "섀시")로 지정되었습니다. ZIL-135MSH라는 명칭도 있습니다. 일부 단위는 IL-18에서 빌린 것이지만이 사실은 프로젝트 이름에 반영되지 않았습니다.
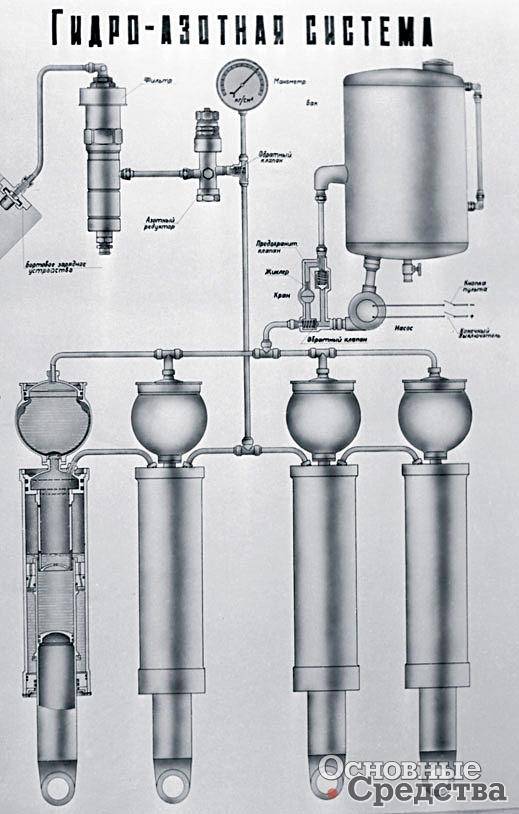
기계의 수압 시스템의 다이어그램. Figure Os1.ru
ZIL-135Sh 프로젝트는 다른 초고 트래픽 기계와 가장 큰 차이가있는 비정상 설계의 자체 추진 실험실을 제안했습니다. 특수 기능은 발전소 또는 변속기의 구성 및 섀시의 설계 모두에 존재했습니다. 특히, 후자는 전통적인 "공간"컨베이어의 집합과 요소를 결합해야했습니다.
실험 장비의 기본은 복잡한 형태의 프레임이었습니다. 그것의 앞과 뒤 부분은 직사각형이었다. 그들 사이에, 오두막 바로 뒤에는 L 자형 프로파일의 세로 스파가있었습니다. 섀시의 특수 요소를 설치하도록 설계되었습니다. 운전실을 설치하기 위해 프레임의 전면 돌출부를 사용하고 프레임의 후면부에 한 번에 두 개의 발전소 요소를 배치하는 것이 제안되었습니다. 또한 다양한 상품이나 재산을 운송 할 시체가 있습니다.
ZIL-135Sh 발전소는 두 개의 엔진으로 구성되어 있습니다. ZIL-XNUMYЯH power 375 hp 첫 번째 엔진은 뒤쪽 프레임 어셈블리의 앞에있었습니다. 플랫폼의 후면에서 휠 축 바로 위에 두 번째 모터를 배치합니다. 전방 엔진은 375 kW의 출력을 가진 GET-120 발전기에 연결되어 전기 전송의 기초가되었습니다. 두 번째 엔진에는 리어 액슬과 관련된 하이드로 기계식 변속기가 장착되어 있습니다. 설계자가 생각한 것처럼 주 엔진은 가스 엔진의 일부인 전면 엔진이었습니다. 두 번째 모터는 일부 상황에서 자동차의 전반적인 성능을 높이기 위해 사용되도록 계획되었습니다.
오른쪽 휠 랙. Os1.ru 사진
전체 실험 프로젝트의 주요 요소 인 장비는 L 자형 프레임 측면 부재에 매달려있었습니다. 특수 수직 지지대에는 IL-18의 집합체를 기본으로하여 2 개의 랙을 배치했습니다. 수직 스탠드가 있었는데, 450 mm 스트로크의 수압 서스펜션 쇼크 업소버로 사용되었습니다. 스파크는 전기 구동 장치를 장착하여 스탠드가 수직 축을 중심으로 회전 할 수있어 기동성을 제공합니다. 선반의 바닥에는 한 쌍의 모터 휠이있었습니다.
Plant No.476은 랙의 움직임을 제어하기위한 원래의 동기 추적 시스템을 개발했습니다. 제어 시스템은 스티어링 연동 장치 또는 평행 사변형의 법칙에 따라 두 가지 모드를 사용하여 랙을 90 °까지 좌우로 회전 할 수있었습니다. 너비 20 °의 섹터 내에서 조종하는 것도 가능했습니다. 컨트롤의 작동 모드는 운전자가 선택했습니다. 스티어링 휠 회전의 명령에 대한 변환은 여러 센서에서 데이터를 수신하고 액추에이터에 대해 발급 된 특수 아날로그 장치에 의해 수행되었습니다. 이러한 알고리즘은 국내 사례에서 처음으로 구현되었습니다.
한 쌍의 모터 휠이 랙의 하부에있는 공통 지지대에 장착되었습니다. 각각의 허브는 단일 스테이지 유성 기어 박스에 연결된 15 kW 전력을 갖춘 DT-15mt 직류 전기 모터를 수용했습니다. 바퀴는 개발 된 트레드가있는 크기 1200x500x580 mm의 타이어로 완성되었습니다. 앞쪽 스트럿의 4 륜 모두 중앙 집중식 압력 제어 시스템을 갖추고있었습니다. 타이어 압력은 1-3 kg / sq. Cm 내에서 다양합니다.

랙 회전 제어 시스템. Os1.ru 사진
2 개의 2 륜 피벗 포인트에는 프레임을 올바른 위치에서지지하는 데 필요한 후방 액슬이 보충되었습니다. 이중 바퀴가 달린 다리는 세로 스프링에 매달려있었습니다. 하이드로 메카닉 트랜스미션을 사용하여 "후방"엔진의 동력이 후방 차축의 휠로 전달되었습니다.
하체 구성품의 특수 설계와 관련하여 모델 프로토 타입 ZIL-135Sh의 휠 공식은 6 XX6 / 4 또는 4 X4 + 2 XX2로 설명 될 수 있습니다. 차의 모든 6 개의 바퀴는 이끌었다. 그러나 2 개의 후륜 구동은 멈출 수 있었다. 6 4 바퀴는 다루기 쉽도록 만들어졌으며 랙과 함께 선회했습니다.
일부 테스트에서는 ZIL-135Sh 프로토 타입에 유압 잭이 장착되었습니다. 캡 바로 뒤에있는 프레임 전면의 측면에 설치된 한 쌍의 장치. 잭의 도움으로 스위블 기둥의 바퀴에 가해지는 하중을 변화시켜 기계 전면을 어지럽히는 것이 가능했습니다.
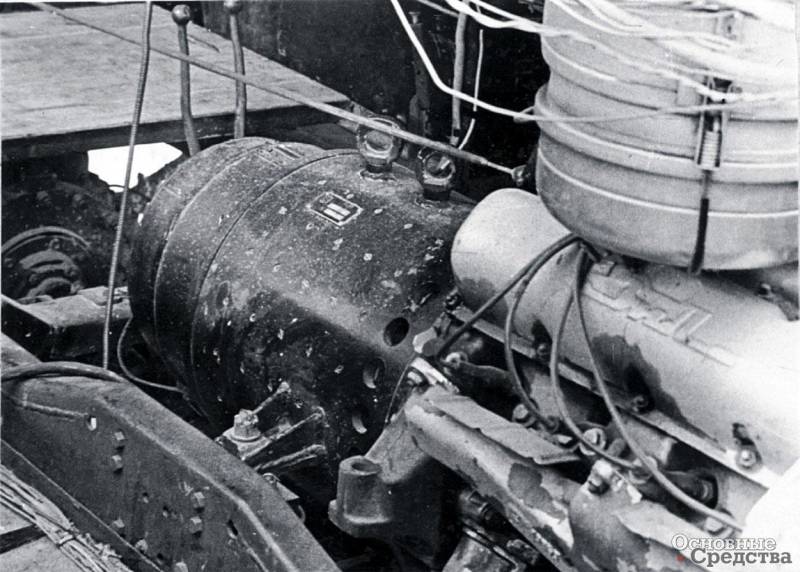
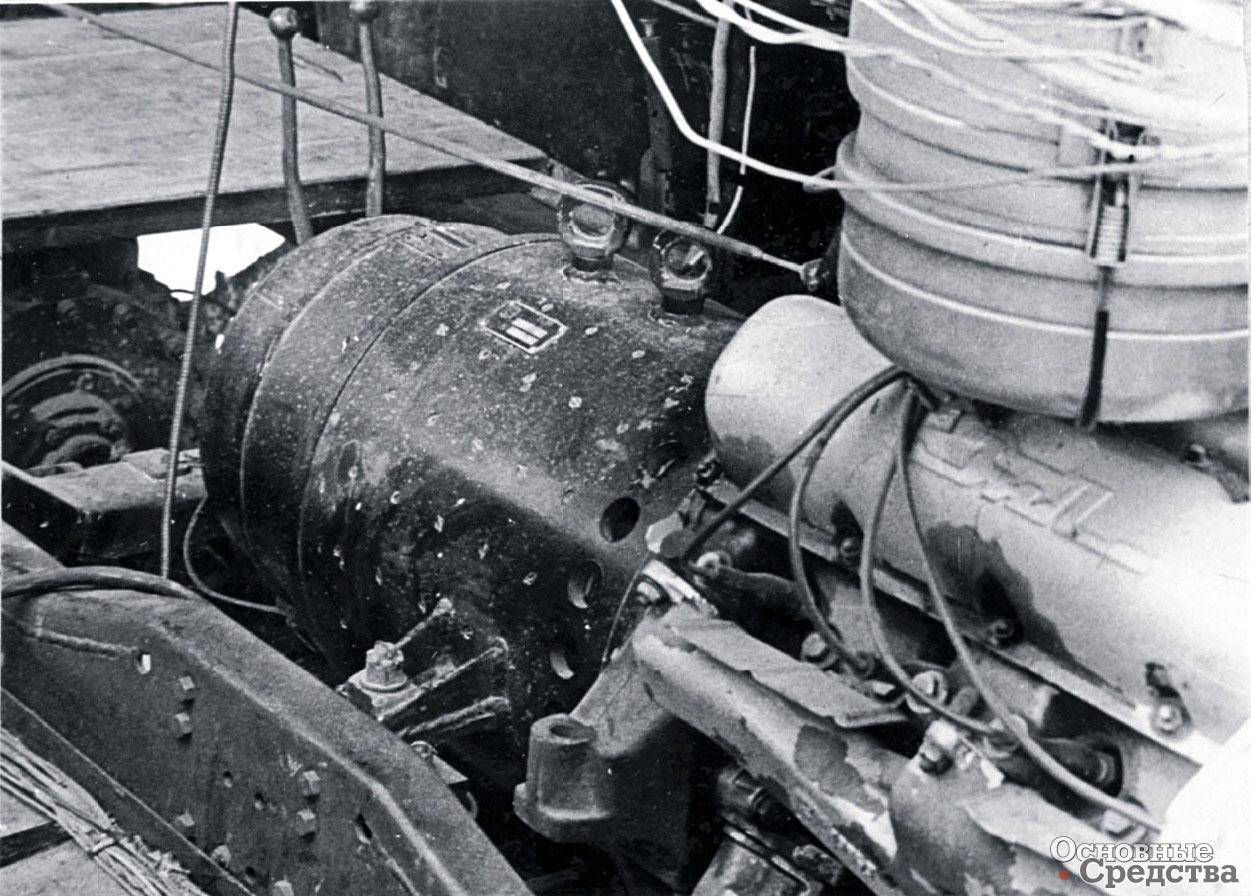
발전소. 중앙에는 발전기 GET-120가 있으며 오른쪽에는 ZIL-375 엔진이 후방 축에 연결되어 있습니다. Os1.ru 사진
프레임의 전면 돌출부는 ZIL-135K에서 빌린 택시의 기초 역할을했습니다. 그것은 넓은 영역에 유약의 도움으로 네 자리와 all-round 가시성을 가진 유리 섬유 단위이었다. 다른 전송 옵션을 가진 2 개의 자율 발전소의 사용과 관련하여 운전실은 특별한 제어 장치 세트를 받았다. 큰 크기로 구별되는 전기 시스템을 제어하는 수단을 갖춘 추가 차폐물은 객실의 오른쪽 워크 스테이션 앞에 설치해야했습니다. 높은 복잡성을 특징으로하는이 이중 제어 포스트는 모든 시스템을 완벽하게 제어 할 수있었습니다.
프레임의 뒤쪽 부분으로 형성된 엔진 실 위쪽에는 넓은 평판이 설치되었습니다. 중간 높이의 측면을 가진 목재화물 플랫폼은 천막 설치를위한 호를 받았다. 또 다른 호가 오두막 뒤에 있었고 타르 칠한 방석이있는 회전식 기둥으로 스파를 덮을 수있었습니다. 시체의 측면에는 착륙 단계가있는 문이있었습니다. 보고서에 따르면, 시험 도중, 시체는 시험 장비에 필요한 밸러스트 및 다양한 재료의 운송에 사용되었습니다.
프로토 타입 ZIL-135Sh의 길이는 9,5 m 미만이고 너비는 3,66 m, 높이는 3,1 m이며 연석 중량은 12,9 t입니다. 계산 된 운반 용량은 12 t입니다.이 모든 하중은 이륜 선반 한 쌍으로 형성된 전축에만 적용됩니다. 프로토 타입의 휠베이스 - 4,46 m. 수직의 중심을 따라있는 앞의 "차축"게이지는 2 m으로 외륜의 중심을 따라 약 1.5 배 더 길었습니다. 리어 액슬 트랙 - 1,79 m.

전기 제어판. Gruzovikpress.ru의 사진
1967의 초여름에 미래의 "공간"컨베이어의 주요 기술을 시연 한 새로운 유형의 기계 프로토 타입이 기성 부품을 최대한 활용하여 제작되었습니다. 6 월말, 자동차는 Bronnitsy시의 국방부 21 연구소의 시험장으로 배달되었습니다. 다음 몇 개월 동안, 프로토 타입 모델은 테스트 현장에서 근무했고 카자흐스탄 SSR의 대초원에 가까운 조건에서 그 기능을 보여주었습니다. 높은 결과가 얻어졌으며 기계의 모든 새로운 장치가 잘 나타났습니다.
고속도로에서 주행하는 ZIL-135Sh는 60 km / h까지 가속됩니다. 좋은 도로의 평균 속도는 그 절반이었습니다. 비포장 도로와 초원에서는 쟁기질시 최대 20 km / h의 속도에 도달 할 수있었습니다 (10 km / h까지). 시험하는 동안, 차는 1000 km 주변의 여러 가지 표면과 토양으로지나 갔다. 낮은 지지력을 가진 것을 포함하여 모든 표면에서, 모든 지형 차량은 자신감이있었습니다. 그러한 컨베이어는 의도 된 작업 영역에서 정상적으로 기능 할 수 있음이 밝혀졌습니다.
테스트의 목적 중 하나는 전륜 휠 스트럿에 대한 원래의 자동 제어 시스템을 점검하는 것이 었습니다. 모든 복잡성과 예상되는 위험으로 인해 이러한 장비는 해당 장비에 할당 된 작업을 처리했습니다. Automatics는 스티어링 휠의 명령을 올바르게 처리하고 모든 조건에서 필요한 기동을 제공했습니다. 스티어링 휠을 90 °로 돌릴 때, 우리는 5,1 미터의 최소 회전 반경 (바깥 쪽 휠에서)을 얻을 수있었습니다.이 차는 실제로 후방 차축을 돌고있었습니다.

ZIL-135는 90 °에서 휠을 회전시키는 기능을 보여줍니다. 사진 Denisovets.ru
프로토 타입 ZIL-135Sh의 테스트가 성공적이었습니다. 이 프로젝트의 모든 주요 기술은 로켓 기술을위한 풀 사이즈 컨베이어를 만드는 데 사용될 수 있습니다. 경험 많은 전 지형 차량의 테스트가 완료되기 전에도 개발 작업은 본격적인 운송 수단에서 시작되었습니다. 가까운 장래에 SKB ZIL은 필요한 모든 문서를 준비하고 프로토 타입 제작 준비를 진행했습니다.
새로운 컨베이어의 제작과 병행하여, "달 (Hunar)"로켓 H-1의 설계가 수행되었습니다. 우주 프로그램 V.P.의 새로운 머리. 특정시기부터 미신은 바이 코 누르 (Baikonur)에 미사일을 운반하기위한 새로운 물류 시스템을 배치 할 필요성을 의심하기 시작했습니다. 모든 장점으로 인해 반 사막과 스텝을 통한 미사일 골재 운반은 심각한 어려움과 위험과 관련되어있었습니다. 또한, 컨베이어의 프로젝트는 생산 및 후속 작업의 관점에서 너무 비싸고 어려웠습니다.
올해의 1967이 끝날 무렵, ZIL-135Sh 프로토 타입 테스트가 완료된 직후, 새로운 유형의 차량을 포기한다는 근본적인 결정이 내려졌습니다. OKB-1은 특별한 8 축 컨베이어를 만들기 위해 주문을 취소했습니다. 로켓의 요소는 여전히 철도로 운송되도록 제안되었습니다. 그것이 H-1 로켓 유닛의 인도가 보장되는 방법입니다.

모형은 자체 축을 중심으로 회전합니다. 사진 러시아 - 힘 .Rf
테스트가 끝나고 프로젝트가 종료 된 후 ZIL-135Sh 프로토 타입이 저장 용으로 보냈습니다. 그의 운명은 알 수 없다. 존재에 대한 정보가 현재 누락되었습니다. 아마 어느 시점에서 그는 불필요한 것으로 분해되었다. 국내 박물관에는 SKB에서 개발 한 몇 가지 독특한 경험이있는 전 지형 차량이 있습니다. Likhachev,하지만 ZIL-135Sh 자동차가 빠졌습니다.
작업이 종료 될 때까지는 풀 사이즈 컨베이어의 프로젝트가 완료되지 않았습니다. 나중에, 1970 년대 중반에 로켓과 우주 기술을위한 여분의 무거운 수송기를 만드는 문제가 다시 발생했지만 큰 짐을 수송하는 임무는 특수 장비가 장착 된 항공기에 위임되기로 결정되었습니다. 특별한 육상 섀시의 개발은 실용적인 애플리케이션에 다시 미치지 못했습니다.
원래의 프로토 타입 모델은 기대에 부합했지만 고객은 여분의 중량 트랜스 포터의 주요 프로젝트를 포기하기로 결정했습니다. 결과적으로, ZIL-135Sh 테마는 개발되지 않았으며, 그 개발은 사실상 주장되지 않았습니다. 그러나,이 차는 약간의 호기심이 많은 칭호를 남겼다. 프로토 타입 ZIL-135Sh은 역사 국내 자동차 산업의 역사에서 가장 흥미로운 프로토 타입 중 하나입니다. 또한, 그것은 브랜드 이름 "ZIL"로 마지막 8 륜 모든 - 지형 차량이었다. SKB ZIL의 다음과 같은 높은 지형 차량에는 모두 3 축 섀시가 장착되어 있습니다.
자료에 따르면,
http://denisovets.ru/
https://drive2.ru/
https://os1.ru/
http://gruzovikpress.ru/
http://русская-сила.рф/
Kochnev E.D. 소련군의 비밀 차. - M : Yauza, Eksmo, 2011.
60 년대 중반에 이르기까지 소련 우주 계획은 일정한 병참 문제를 겪었다. 우주 로켓은 Kuibyshev (현재 Samara)시의 Progress 공장에서 건설되었으며, 그 후 바이 코 누르 우주 센터로 레일을 통해 분해 된 형태로 인도되어 최종 조립 및 발사 준비가 이루어졌습니다. 토크는 P-7 플랫폼을 기반으로하는 발사체에 관한 것이었지만 그러한 방법은 받아 들일 만하다. 그러나, 증가 된 차원을 특징으로하는 "달의 (heunar)"로켓 인 H-1의 개발은 이미 진행 중이다. 우주선에 우주선을 인도하는 것은 심각한 문제와 관련이 있습니다.
매립시 ZIL-135Sh 견본 샘플. 사진 러시아 - 힘 .Rf
철도 운송의 대안을 고려하여 OKB-1 전문가 (S.P. 여왕은 바이 코 누르 (Baikonur)에게 미사일 골재 배달 원본을 제공했다. 이 단계들은 쿠비 셰프 (Kuibyshev)에 건설 될 것을 제안 받았고, 그 후 볼가 (Volga)와 카스피해 (Caspian Sea)를 따라 특수 부두를 따라 구 레이프 (Guryev)시 (현재 카이로의 아티 라우 (Atyrau))로 운반되어야합니다. 그곳에서, 로켓 기술은 특수 수송선에 다시 탑재 될 계획이었고 육지로 우주 비행선으로 배달되었습니다. 이러한 제안을 이행하기 위해서는 수용 가능한 특성을 가진 하천 부선 및 육상 차량을 만드는 것이 필요했습니다. 육로 운송의 경우 설계자의 임무는 미래 H-1의 개별 단위가 적어도 20-25 t의 무게를 가질 수 있다는 사실 때문에 복잡했습니다.
V.P.로 이끄는 OKB-1 엔지니어 그룹. 페트 로프 (Petrov)는 미래 운송업자의 대략적인 모습을 형성하고 몇 가지 중요한 제안을했다. 따라서, 수용 가능한 이동성과 기동성을 보장하기 위해, 상기 기계는 항공기의 기수 부상기에 사용되는 유형의 방향성 휠을 필요로했다. 동시에, 카자흐스탄 SSR의 대초원에서 기동성과 이동성의 원하는 특성은 적어도 1,5 m의 직경을 가진 바퀴를 사용해야 만 얻을 수 있습니다. 이러한 섀시에서는 미래의 컨베이어가 허용되는 치수를 얻고 원하는 부하 용량을 나타낼 수 있습니다.
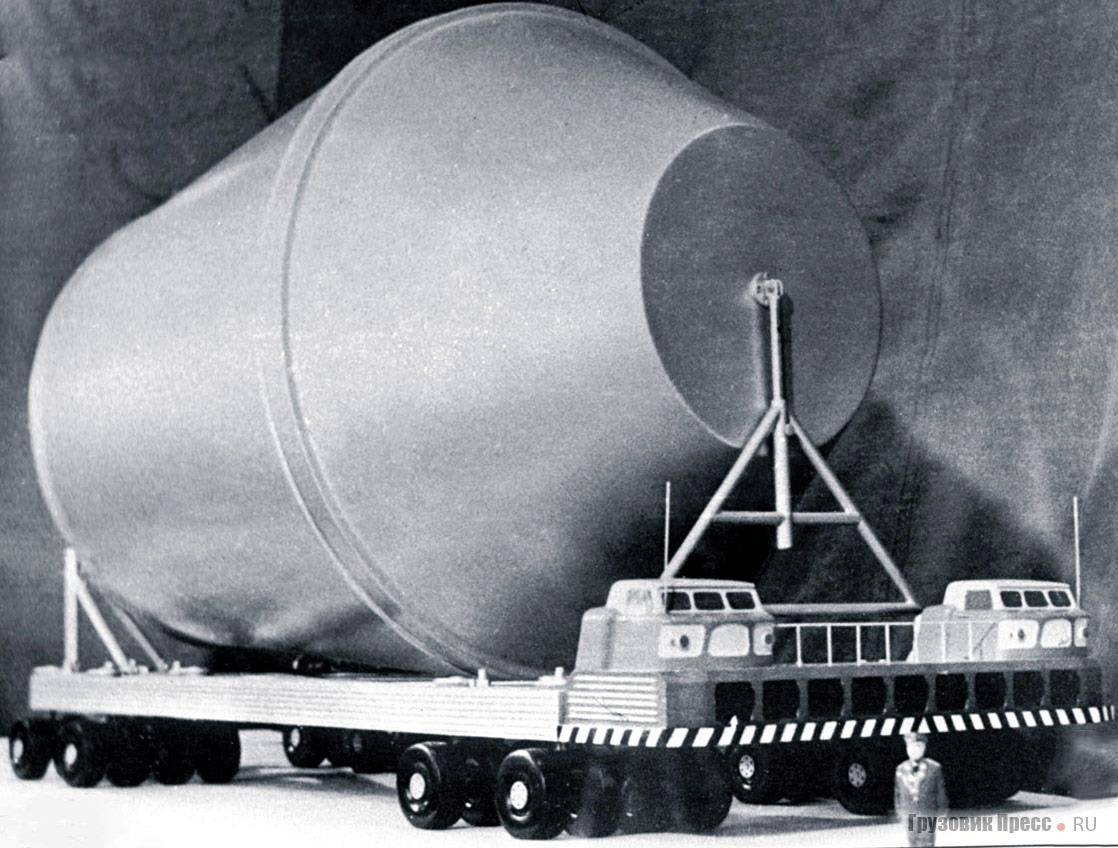
페이로드가있는 장래의 풀 사이즈 컨베이어의 레이아웃. Gruzovikpress.ru의 사진
장래의 로켓 컨베이어의 대략적인 외관을 형성 한 OKB-1은 본격적인 프로젝트의 개발자를 찾기 시작했습니다. 동시에 몇몇 국내 자동차 공장에는 필요한 경험이 있었지만 모두가 "우주"디자이너의 제안에 열광적으로 반응하지는 않았습니다. 그래서 NAMI 연구소와 민스크 자동차 공장은 복잡한 프로젝트에 참여하지 않았습니다. 개발에는 너무 많은 시간이 할당되지 않았습니다.
SKB ZIL은 V.A가 이끄는 상황을 살폈습니다. Grachev. 새로운 차량 개발에 전념 한 회의에서 그는 필요한화물의 4 배인 100 t까지 무게를 측정하는화물을 운송 할 수있는 특수 기계를 만들 준비가되었음을 표명했습니다. 간단한 계산은 장래의 전 지형 차량이 H-1 로켓의 두 번째 또는 세 번째 단계를 전적으로 수행 할 수 있음을 보여주었습니다. 크고 무거운 첫 단계는 단지 세 부분으로 분해 될 수 있습니다.
따라서 바이 코 누르 (Baikonur) 로켓트의 모든 요소를 수송하기 위해서는 5 ~ 6 개의 수송기 비행이 필요했고 그 이후 로켓 조립을 시작할 수있었습니다. 철도 운송의 경우 전체 에셜론이 필요했고 어셈블리가 훨씬 오래 걸립니다.
체계는 ZIL-135Sh를 경험했다. 러시아의 힘.
곧 공식적으로 새 프로젝트를 시작한 수많은 문서가 나왔습니다. 우주 산업 운송 업체의 수석 개발자가 SKB ZIL로 임명되었습니다. 특수 전기 시스템의 설계는 SKB Moscow Plant No. 467에 맡겼다. F.E. Dzerzhinsky. OKB-1은 기술 사양 준비, 작업 조정 및 관리 성격의 지원을 담당했습니다.
1967 초기에 여러 기업이 공동으로 미래의 운송 업체 형태를 형성했습니다. 크기가 10,8х21,1 m 인화물 플랫폼을 갖춘 자동차를 만드는 것이 제안되었습니다. 섀시에는 휠 수식 32х32가있는 8 축 디자인이 있어야합니다. 바퀴는 스위블 필러에 쌍으로 설치하도록 제안되었습니다. 케이스의 각 모서리에 4 개의 랙을 장착하십시오. 이 설계로 인해 섀시는 최고의 기동성을 제공 할 수 있습니다. 총중량은 80-100 t에 도달 할 것이고, 약속 된 100 t 근처의 가반 하중을 가할 것입니다.
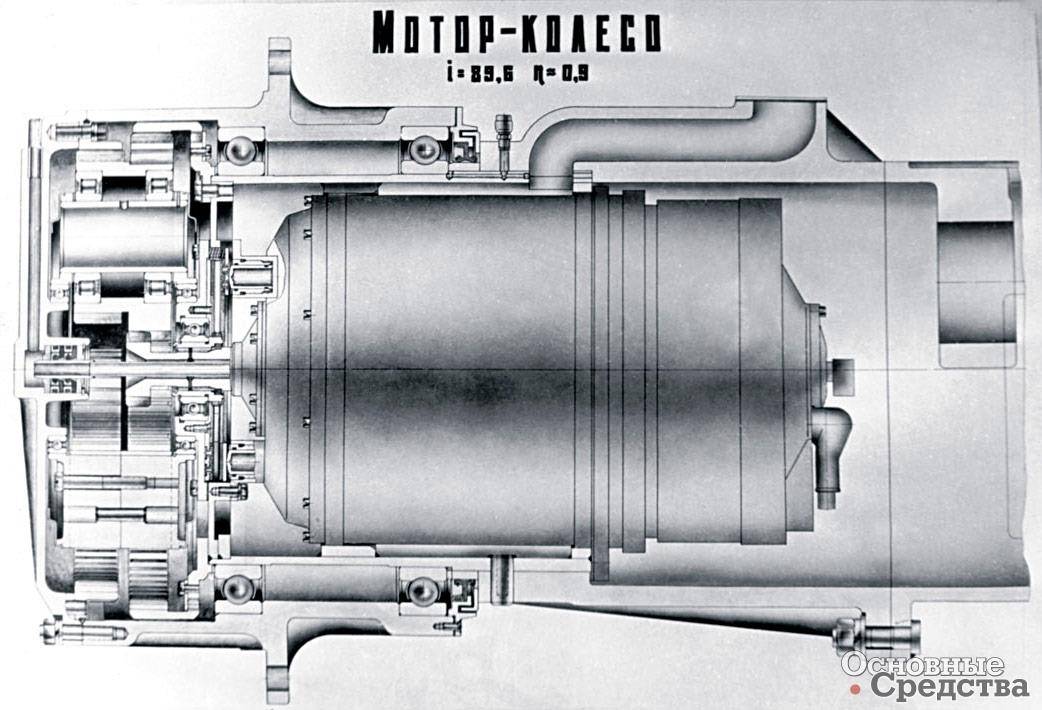
엔진 DT-15M이있는 계통 모터 휠. Figure Os1.ru
전체 컨피규레이션에서 경험이 풍부한 컨베이어의 구조가 아직 이해가되지 않았다는 것은 명백합니다. 본격적인 프로젝트를 개발하기 전에 단순한 구성으로 목업 샘플을 작성, 빌드 및 테스트 할 것을 제안했습니다. 섀시 측면에서 볼 때,이 차는 풀 사이즈 컨베이어의 8 분의 1 정도였습니다. 감소 된 장비의 도움으로 주요 아이디어와 해결책을 검증하고 특정 결론을 도출하고 기존 프로젝트를 변경할 수있었습니다.
미리 만들어진 구성 요소와 어셈블리를 사용하여 프로토 타입 모델을 만드는 것이 제안되었습니다. 구성 요소의 주요 출처는 ZIL-135 제품군의 모든 지형 차량이었습니다. 예를 들어, 전기 변속기는 ZIL-135E 전 지형 차량의 단위를 기준으로했습니다. 이와 관련하여 실험 장비는 ZIL-135Sh ( "섀시")로 지정되었습니다. ZIL-135MSH라는 명칭도 있습니다. 일부 단위는 IL-18에서 빌린 것이지만이 사실은 프로젝트 이름에 반영되지 않았습니다.
기계의 수압 시스템의 다이어그램. Figure Os1.ru
ZIL-135Sh 프로젝트는 다른 초고 트래픽 기계와 가장 큰 차이가있는 비정상 설계의 자체 추진 실험실을 제안했습니다. 특수 기능은 발전소 또는 변속기의 구성 및 섀시의 설계 모두에 존재했습니다. 특히, 후자는 전통적인 "공간"컨베이어의 집합과 요소를 결합해야했습니다.
실험 장비의 기본은 복잡한 형태의 프레임이었습니다. 그것의 앞과 뒤 부분은 직사각형이었다. 그들 사이에, 오두막 바로 뒤에는 L 자형 프로파일의 세로 스파가있었습니다. 섀시의 특수 요소를 설치하도록 설계되었습니다. 운전실을 설치하기 위해 프레임의 전면 돌출부를 사용하고 프레임의 후면부에 한 번에 두 개의 발전소 요소를 배치하는 것이 제안되었습니다. 또한 다양한 상품이나 재산을 운송 할 시체가 있습니다.
ZIL-135Sh 발전소는 두 개의 엔진으로 구성되어 있습니다. ZIL-XNUMYЯH power 375 hp 첫 번째 엔진은 뒤쪽 프레임 어셈블리의 앞에있었습니다. 플랫폼의 후면에서 휠 축 바로 위에 두 번째 모터를 배치합니다. 전방 엔진은 375 kW의 출력을 가진 GET-120 발전기에 연결되어 전기 전송의 기초가되었습니다. 두 번째 엔진에는 리어 액슬과 관련된 하이드로 기계식 변속기가 장착되어 있습니다. 설계자가 생각한 것처럼 주 엔진은 가스 엔진의 일부인 전면 엔진이었습니다. 두 번째 모터는 일부 상황에서 자동차의 전반적인 성능을 높이기 위해 사용되도록 계획되었습니다.
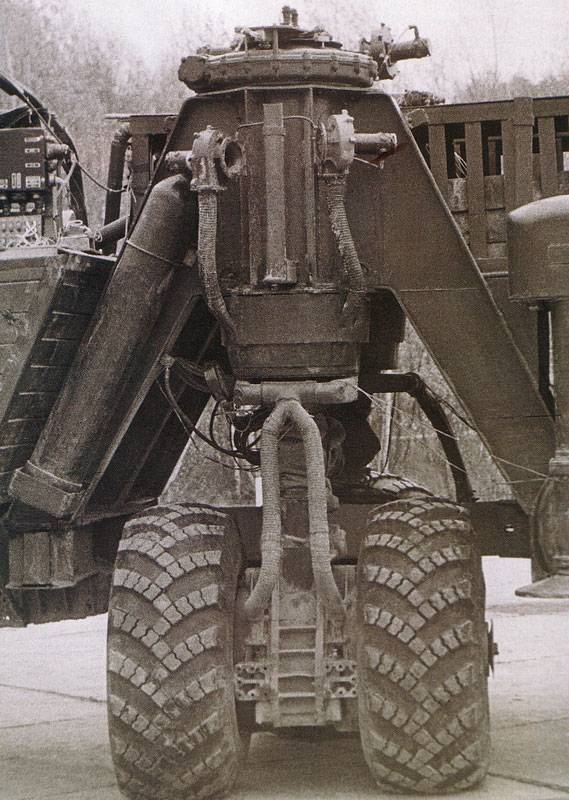
오른쪽 휠 랙. Os1.ru 사진
전체 실험 프로젝트의 주요 요소 인 장비는 L 자형 프레임 측면 부재에 매달려있었습니다. 특수 수직 지지대에는 IL-18의 집합체를 기본으로하여 2 개의 랙을 배치했습니다. 수직 스탠드가 있었는데, 450 mm 스트로크의 수압 서스펜션 쇼크 업소버로 사용되었습니다. 스파크는 전기 구동 장치를 장착하여 스탠드가 수직 축을 중심으로 회전 할 수있어 기동성을 제공합니다. 선반의 바닥에는 한 쌍의 모터 휠이있었습니다.
Plant No.476은 랙의 움직임을 제어하기위한 원래의 동기 추적 시스템을 개발했습니다. 제어 시스템은 스티어링 연동 장치 또는 평행 사변형의 법칙에 따라 두 가지 모드를 사용하여 랙을 90 °까지 좌우로 회전 할 수있었습니다. 너비 20 °의 섹터 내에서 조종하는 것도 가능했습니다. 컨트롤의 작동 모드는 운전자가 선택했습니다. 스티어링 휠 회전의 명령에 대한 변환은 여러 센서에서 데이터를 수신하고 액추에이터에 대해 발급 된 특수 아날로그 장치에 의해 수행되었습니다. 이러한 알고리즘은 국내 사례에서 처음으로 구현되었습니다.
한 쌍의 모터 휠이 랙의 하부에있는 공통 지지대에 장착되었습니다. 각각의 허브는 단일 스테이지 유성 기어 박스에 연결된 15 kW 전력을 갖춘 DT-15mt 직류 전기 모터를 수용했습니다. 바퀴는 개발 된 트레드가있는 크기 1200x500x580 mm의 타이어로 완성되었습니다. 앞쪽 스트럿의 4 륜 모두 중앙 집중식 압력 제어 시스템을 갖추고있었습니다. 타이어 압력은 1-3 kg / sq. Cm 내에서 다양합니다.

랙 회전 제어 시스템. Os1.ru 사진
2 개의 2 륜 피벗 포인트에는 프레임을 올바른 위치에서지지하는 데 필요한 후방 액슬이 보충되었습니다. 이중 바퀴가 달린 다리는 세로 스프링에 매달려있었습니다. 하이드로 메카닉 트랜스미션을 사용하여 "후방"엔진의 동력이 후방 차축의 휠로 전달되었습니다.
하체 구성품의 특수 설계와 관련하여 모델 프로토 타입 ZIL-135Sh의 휠 공식은 6 XX6 / 4 또는 4 X4 + 2 XX2로 설명 될 수 있습니다. 차의 모든 6 개의 바퀴는 이끌었다. 그러나 2 개의 후륜 구동은 멈출 수 있었다. 6 4 바퀴는 다루기 쉽도록 만들어졌으며 랙과 함께 선회했습니다.
일부 테스트에서는 ZIL-135Sh 프로토 타입에 유압 잭이 장착되었습니다. 캡 바로 뒤에있는 프레임 전면의 측면에 설치된 한 쌍의 장치. 잭의 도움으로 스위블 기둥의 바퀴에 가해지는 하중을 변화시켜 기계 전면을 어지럽히는 것이 가능했습니다.
발전소. 중앙에는 발전기 GET-120가 있으며 오른쪽에는 ZIL-375 엔진이 후방 축에 연결되어 있습니다. Os1.ru 사진
프레임의 전면 돌출부는 ZIL-135K에서 빌린 택시의 기초 역할을했습니다. 그것은 넓은 영역에 유약의 도움으로 네 자리와 all-round 가시성을 가진 유리 섬유 단위이었다. 다른 전송 옵션을 가진 2 개의 자율 발전소의 사용과 관련하여 운전실은 특별한 제어 장치 세트를 받았다. 큰 크기로 구별되는 전기 시스템을 제어하는 수단을 갖춘 추가 차폐물은 객실의 오른쪽 워크 스테이션 앞에 설치해야했습니다. 높은 복잡성을 특징으로하는이 이중 제어 포스트는 모든 시스템을 완벽하게 제어 할 수있었습니다.
프레임의 뒤쪽 부분으로 형성된 엔진 실 위쪽에는 넓은 평판이 설치되었습니다. 중간 높이의 측면을 가진 목재화물 플랫폼은 천막 설치를위한 호를 받았다. 또 다른 호가 오두막 뒤에 있었고 타르 칠한 방석이있는 회전식 기둥으로 스파를 덮을 수있었습니다. 시체의 측면에는 착륙 단계가있는 문이있었습니다. 보고서에 따르면, 시험 도중, 시체는 시험 장비에 필요한 밸러스트 및 다양한 재료의 운송에 사용되었습니다.
프로토 타입 ZIL-135Sh의 길이는 9,5 m 미만이고 너비는 3,66 m, 높이는 3,1 m이며 연석 중량은 12,9 t입니다. 계산 된 운반 용량은 12 t입니다.이 모든 하중은 이륜 선반 한 쌍으로 형성된 전축에만 적용됩니다. 프로토 타입의 휠베이스 - 4,46 m. 수직의 중심을 따라있는 앞의 "차축"게이지는 2 m으로 외륜의 중심을 따라 약 1.5 배 더 길었습니다. 리어 액슬 트랙 - 1,79 m.

전기 제어판. Gruzovikpress.ru의 사진
1967의 초여름에 미래의 "공간"컨베이어의 주요 기술을 시연 한 새로운 유형의 기계 프로토 타입이 기성 부품을 최대한 활용하여 제작되었습니다. 6 월말, 자동차는 Bronnitsy시의 국방부 21 연구소의 시험장으로 배달되었습니다. 다음 몇 개월 동안, 프로토 타입 모델은 테스트 현장에서 근무했고 카자흐스탄 SSR의 대초원에 가까운 조건에서 그 기능을 보여주었습니다. 높은 결과가 얻어졌으며 기계의 모든 새로운 장치가 잘 나타났습니다.
고속도로에서 주행하는 ZIL-135Sh는 60 km / h까지 가속됩니다. 좋은 도로의 평균 속도는 그 절반이었습니다. 비포장 도로와 초원에서는 쟁기질시 최대 20 km / h의 속도에 도달 할 수있었습니다 (10 km / h까지). 시험하는 동안, 차는 1000 km 주변의 여러 가지 표면과 토양으로지나 갔다. 낮은 지지력을 가진 것을 포함하여 모든 표면에서, 모든 지형 차량은 자신감이있었습니다. 그러한 컨베이어는 의도 된 작업 영역에서 정상적으로 기능 할 수 있음이 밝혀졌습니다.
테스트의 목적 중 하나는 전륜 휠 스트럿에 대한 원래의 자동 제어 시스템을 점검하는 것이 었습니다. 모든 복잡성과 예상되는 위험으로 인해 이러한 장비는 해당 장비에 할당 된 작업을 처리했습니다. Automatics는 스티어링 휠의 명령을 올바르게 처리하고 모든 조건에서 필요한 기동을 제공했습니다. 스티어링 휠을 90 °로 돌릴 때, 우리는 5,1 미터의 최소 회전 반경 (바깥 쪽 휠에서)을 얻을 수있었습니다.이 차는 실제로 후방 차축을 돌고있었습니다.

ZIL-135는 90 °에서 휠을 회전시키는 기능을 보여줍니다. 사진 Denisovets.ru
프로토 타입 ZIL-135Sh의 테스트가 성공적이었습니다. 이 프로젝트의 모든 주요 기술은 로켓 기술을위한 풀 사이즈 컨베이어를 만드는 데 사용될 수 있습니다. 경험 많은 전 지형 차량의 테스트가 완료되기 전에도 개발 작업은 본격적인 운송 수단에서 시작되었습니다. 가까운 장래에 SKB ZIL은 필요한 모든 문서를 준비하고 프로토 타입 제작 준비를 진행했습니다.
새로운 컨베이어의 제작과 병행하여, "달 (Hunar)"로켓 H-1의 설계가 수행되었습니다. 우주 프로그램 V.P.의 새로운 머리. 특정시기부터 미신은 바이 코 누르 (Baikonur)에 미사일을 운반하기위한 새로운 물류 시스템을 배치 할 필요성을 의심하기 시작했습니다. 모든 장점으로 인해 반 사막과 스텝을 통한 미사일 골재 운반은 심각한 어려움과 위험과 관련되어있었습니다. 또한, 컨베이어의 프로젝트는 생산 및 후속 작업의 관점에서 너무 비싸고 어려웠습니다.
올해의 1967이 끝날 무렵, ZIL-135Sh 프로토 타입 테스트가 완료된 직후, 새로운 유형의 차량을 포기한다는 근본적인 결정이 내려졌습니다. OKB-1은 특별한 8 축 컨베이어를 만들기 위해 주문을 취소했습니다. 로켓의 요소는 여전히 철도로 운송되도록 제안되었습니다. 그것이 H-1 로켓 유닛의 인도가 보장되는 방법입니다.
모형은 자체 축을 중심으로 회전합니다. 사진 러시아 - 힘 .Rf
테스트가 끝나고 프로젝트가 종료 된 후 ZIL-135Sh 프로토 타입이 저장 용으로 보냈습니다. 그의 운명은 알 수 없다. 존재에 대한 정보가 현재 누락되었습니다. 아마 어느 시점에서 그는 불필요한 것으로 분해되었다. 국내 박물관에는 SKB에서 개발 한 몇 가지 독특한 경험이있는 전 지형 차량이 있습니다. Likhachev,하지만 ZIL-135Sh 자동차가 빠졌습니다.
작업이 종료 될 때까지는 풀 사이즈 컨베이어의 프로젝트가 완료되지 않았습니다. 나중에, 1970 년대 중반에 로켓과 우주 기술을위한 여분의 무거운 수송기를 만드는 문제가 다시 발생했지만 큰 짐을 수송하는 임무는 특수 장비가 장착 된 항공기에 위임되기로 결정되었습니다. 특별한 육상 섀시의 개발은 실용적인 애플리케이션에 다시 미치지 못했습니다.
원래의 프로토 타입 모델은 기대에 부합했지만 고객은 여분의 중량 트랜스 포터의 주요 프로젝트를 포기하기로 결정했습니다. 결과적으로, ZIL-135Sh 테마는 개발되지 않았으며, 그 개발은 사실상 주장되지 않았습니다. 그러나,이 차는 약간의 호기심이 많은 칭호를 남겼다. 프로토 타입 ZIL-135Sh은 역사 국내 자동차 산업의 역사에서 가장 흥미로운 프로토 타입 중 하나입니다. 또한, 그것은 브랜드 이름 "ZIL"로 마지막 8 륜 모든 - 지형 차량이었다. SKB ZIL의 다음과 같은 높은 지형 차량에는 모두 3 축 섀시가 장착되어 있습니다.
자료에 따르면,
http://denisovets.ru/
https://drive2.ru/
https://os1.ru/
http://gruzovikpress.ru/
http://русская-сила.рф/
Kochnev E.D. 소련군의 비밀 차. - M : Yauza, Eksmo, 2011.
정보