과학 소설이 현실화됩니다. 5 톤 로봇 "보디 빌"
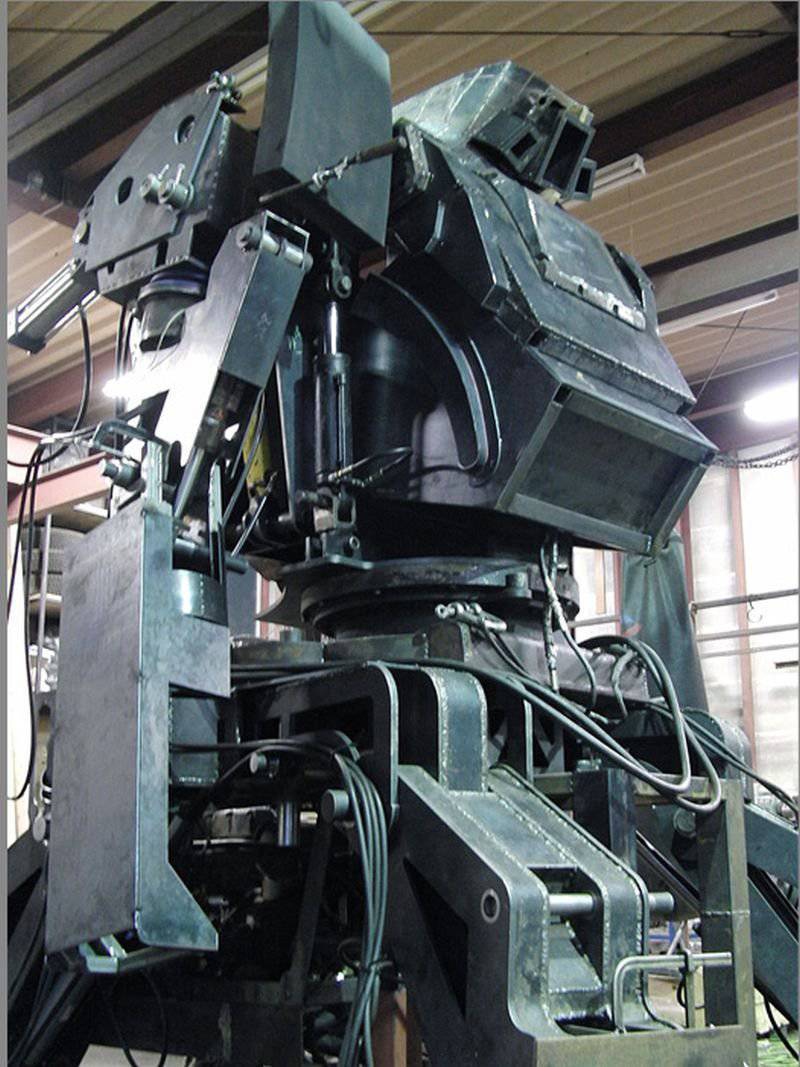
이 로봇은 일본 그룹 Suidobashi Heavy Industry에서 만들었습니다. 사용 테마 로봇 인간 활동의 다양한 영역에서 공상 과학 영화에 나오는 다양한 공상 과학 소설에 잘 설명되어 있습니다. 또한 로봇화의 가능성 중 일부는 이 시간에 느끼고 보고 사용할 수 있습니다. 그러나 이러한 광범위한 제어 기능을 갖춘 로봇 공학의 대표자는 매일 볼 수 없습니다. 로봇 "Vaudeville"은 말하자면 영화 "Real Steel"과 영화 "Avatar"에 나오는 로봇의 "프로토타입"입니다. 오늘날 우리는 그러한 전투 로봇이 하나도 없지만 초기 단계에서 문제없이 구현하는 것이 기술적으로 가능합니다. 같은 생각을 가진 일본의 평범한 사람들이 "Vaudeville"이라는 4미터 5톤의 범용 로봇을 만들어 이러한 가능성을 증명했습니다. 이 로봇의 제어는 로봇 공학을 제어하는 몇 가지 잘 알려진 방법의 조합입니다. 설계자들은 자손을 통제하는 세 가지 방법을 구현할 수 있었습니다. 로봇은 4개의 바퀴로 움직입니다. 높이 3.8m, 무게 4500kg. 설계자들은 작년 말에 제작 작업을 마칠 것으로 예상했지만 오늘 프로젝트가 완전히 완료되었다는 정보는 없습니다. XNUMX월 말, 현재 인터넷의 능력과 준비 상태를 보여주는 비디오가 인터넷에 올라왔습니다.
보더 빌 관리 :
- 첫 번째 방법 : 로봇 몸체의 제어실에있는 조종사의 제어. 이 방법은 영화 "외계인"과 "아바타"에서 제어 로봇을 연상케합니다. 파일럿이 조이스틱에서 핸들을 움직이면 로봇이 움직임을 반복하게됩니다. 조종사의 신체 움직임을 제어하고 모니터링하는 Kinect 센서는 로봇을 제어하는 데 도움을줍니다.
- 두 번째 방법 : 현대적인 컴퓨터 도구 (전화, 컴퓨터, 노트북 등)를 사용한 원격 무선 제어. 로봇에는 3G 네트워크를 통해 인터넷에 연결하는 장비가 제공됩니다. 기계의 조종사는 내부 및 외부 모두 무선으로 로봇에 연결하여 독점 소프트웨어로 제어 할 수 있습니다.
- 세 번째 방법 : 로봇을 "Living Steel"필름에서 제어하는 방법. Kinect 센서를 통해 로봇이 반복적으로 로봇 외부에서 수행하는 파일럿의 움직임을 복사합니다.
일본 디자이너가 로봇을 완성하고 소프트웨어 소프트웨어를 디버깅 할 때 개발 된 소프트웨어와 함께 프로젝트를 판매하려는 의도가 있습니다. 아마 우리는 경기장에서의 전투에서 그러한 로봇의 사용을 곧 목격하게 될 것입니다. 또는이 프로젝트는 군대에 의해 획득 될 것이며 보더 빌 로봇은 전투 로봇으로 지정된 임무를 수행 할 것입니다.
정보 출처 :
http://pda.open.by/it/79913
http://www.hi-news.ru/robots/chetyrexnogij-robot-vaudeville-pod-upravleniem-kinect.html
정보