우주에서 "피더". 간단한 경험과 위대한 미래
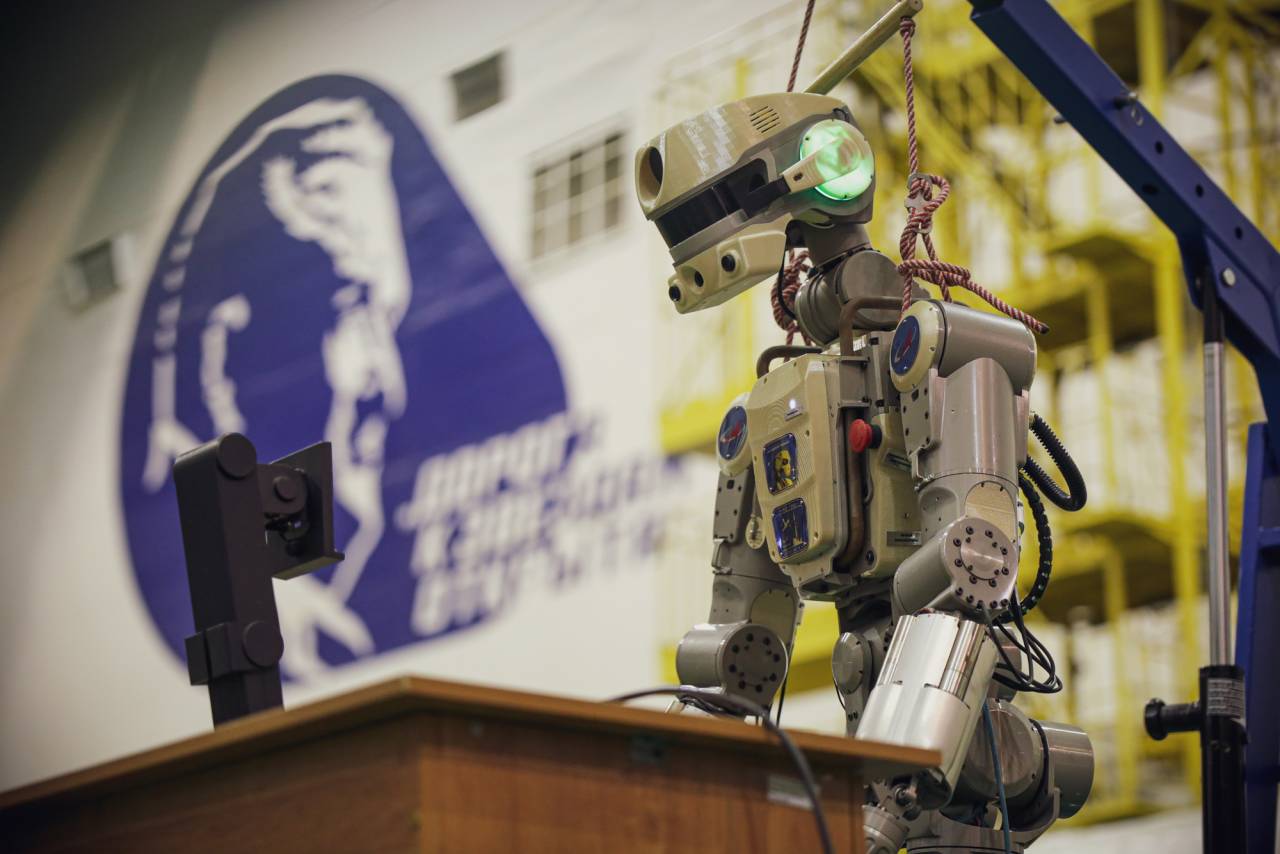
8 월 27에서 Soyuz MS-14 우주선은 특별 탑재량으로 국제 우주 정거장에 도킹되었습니다. 이번에 유인 우주선은 사람이 아니라 특별한 종류의 장비를 운반했습니다. 객실에는 인간형 다목적 로봇 Skybot F-850 / FEDOR 및 보조 장비가 들어 있습니다. 현재 ISS 승무원은 새로운 단지에 대한 첫 번째 점검을 수행하고 있으며보다 복잡한 문제를 해결할 준비를하고 있습니다.

Fedor가 탑승 한 로켓 발사
러시아 "Fedor"는 최초의 의인화가 될 시간이 없었습니다. 로봇 ISS를 타고. 2011년 NASA에서 개발한 Robonaut 2 제품이 우주정거장으로 인도되었습니다. 그러나 F-850은 테스트에 도달했을 뿐만 아니라 우주에 도달한 최초의 러시아 개발품입니다.
이야기 FEDOR는 Advanced Research Foundation이 다목적 의인화 로봇 시스템 설계를 시작했을 때 2014에서 시작되었습니다. 이러한 시스템의 개발은 FPI와 NPO Android Technique에 의해 수행되었습니다. 처음에이 제품은 응급 상황에 적합하도록 설계되었으며 인간에게 위험한 조건에서 작동해야했습니다. 이 프로젝트는 기존 SAR-400 및 SAR-401 로봇의 개발을 기반으로했습니다.
기본 플랫폼을 만드는 것은 몇 가지 어려움과 관련이 있지만 2015-16에 있습니다. 프로젝트가 새로운 단계로 이동했습니다. 그런 다음 우주에서 운영하기 위해 복잡한 버전의 복합체를 만들라는 제안이있었습니다. 이러한 로봇을 "Fedor"또는 FEDOR (Final Experimental Demonstration Object Research)라고합니다. 얼마 전, 단지 이름이 Skybot F-850로 바뀌 었습니다.
8 월 22에서 새로운 RTK가 ISS로 전송되었습니다. 역행 비행 중에 일부 오작동이 발생하여 도킹이 8 월 27에서만 가능했습니다. ISS 승무원은 이미 실제 조건에서 새로운 기술을 익히기 시작했습니다.
가까운 장래에 "Fedor"는 오래 가지 않았지만 궤도에서 열심히 일할 것입니다. 그의 참여와 과학 프로그램의 세부 사항은 아직 공개되지 않았지만 일부 정보가 이미 나타났습니다. 일반적으로 사람이 제어하는 로봇이 다른 물체와 상호 작용하고 특정 작업을 수행하는 다양한 종류의 작업이 계획됩니다.

로봇과 함께 소위 복사 유형 마스터 장치-작업자를위한 특수 "외골격"으로 로봇의 움직임을 제어 할 수 있습니다. ZUKT를 사용하면 작업자는 로봇의 눈으로 모니터링 할 수있을뿐만 아니라 조작기를 완벽하게 제어 할 수 있습니다. 현재 비행의 틀 내에서 모든 실험은 F-850와 ZUKT의 조합을 사용하여 수행됩니다.
궤도에서 첫 날에 새로운 로봇은 여러 실험에 참여할 수 있다고보고되었다. "Fedor"는 다양한 수공구 및 스테이션의 일부 장비로 작업 할 수있는 능력을 보여주었습니다. 유망한 RTK가 다양한 종류의 다양한 기능을 보여줄 새로운 실험이 예상됩니다.
동시에, 우리는 로봇이 우주 공간으로 철수하는 것에 대해 이야기하고 있지 않습니다. Roscosmos 책임자 인 Dmitry Rogozin은 최근에 이러한 실험이 다음 번 Fedor의 ISS 비행 중에 수행 될 것이라고 밝혔다. 현재 계획에 따르면이 비행은 2-3 년 후에 만 이루어질 것입니다. 이 시점까지 단지는 시운전 결과에 따라 완공되며 공간의 특성 조건을보다 완벽하게 충족시킬 수있을 것이다.
한편 Skybot F-850는 국제 우주 정거장 내에서만 사용됩니다. 필요한 모든 실험과 실험을 일주일 이상 수행했습니다. 9 월 6에서 Soyuz MS-14 우주선은 ISS에서 도킹 해제되어 Fedor로 돌아 왔습니다. 그런 다음이 RTK 개발자는 수집 된 정보를 분석해야하므로 새로운 요구 사항을 충족하기 위해 프로젝트를 마무리 할 수 있습니다.
지금까지 FEDOR / F-850는 실험실, 테스트 사이트 및 ISS에서 테스트하도록 설계된 프로토 타입의 상태를 가지고 있습니다. 우주에서의 이러한 시스템의 완전한 구현은 아직 멀었지만이 과정에 대한 전망은 이미 명확하다. 의인화 로봇 시스템의 외관, 개발 및 구현은 국내외 세계 우주 산업에 큰 관심을 끌고 있습니다.

ZUKT와 로봇 및 연산자
프로젝트의 주요 목표는 Fedor였습니다. 위험한 상황에서 일할 때 사람을 대체 할 수있는 RTK를 만들었습니다. 우주 프로그램의 맥락에서 이것은 주로 로봇이 우주 공간으로 들어가 우주 비행사를 위해 그곳에서 작업 할 수 있음을 의미합니다.
이는 작업 준비 및 수행을 크게 단순화 할 수 있습니다. RTK는 음식과 휴식이 필요하지 않으므로 더 오랫동안“선외”를 유지할 수 있습니다. 우주 비행사 운영자는 최적의 모드를 관찰하면서 서로 교체 할 수 있습니다. 또한 지구상의 운전자가 로봇을 제어 할 수 있습니다. 덕분에 우주 비행사가 어려움을 겪는 경우 외부로부터보다 완벽한 지원을받을 수 있습니다.
관계자들은 향후 ISS 외부에서 운영하기 위해 F-850의 특별한 수정이 이루어질 수 있다고 밝혔다. 이러한 RTK는 스테이션 표면에서 작동 할 수 있도록 최적화 된 운송 수단을 제공받으며 지속적으로 외부에있을 수 있으며 명령이 수행되기를 기다립니다. 국제 우주 정거장에 대한 그러한 복합체의 가치는 분명합니다.
원격 제어 로봇도 ISS 내부에서 유용 할 수 있습니다. 그것의 도움으로 지구의 전문가들은 다양한 연구와 실험에 직접 참여할 수 있습니다. 이를 통해 승무원의 업무 부담을 줄일 수있을뿐만 아니라 관련 과학자 및 엔지니어의 참여로 더 많은 범위의 연구를 수행 할 수 있습니다.
기존의 유망한 우주선에서 로봇을 작동 할 때 몇 가지 장점이 있습니다. 특히,“연맹”또는“연맹”의 승무원에게“연맹”을 관찰자로 소개하는 것이 제안된다. 그는 오프라인 작업을 통해 들어오는 모든 데이터를 신속하게 분석하고 살아있는 우주 비행사의 관심을 특정 뉘앙스와 요소에 끌어들일 수 있습니다.

장기적으로 스트레스에 대한 로봇의 저항은 새로운 우주 임무에서 유용 할 수 있습니다. 사람을 다른 천체로 보내는 것은 알려진 어려움과 관련이 있으며 휴머노이드 로봇을 사용하면 그러한 작업이 크게 단순화됩니다. 미래의 달 또는 화성 탐사에서 살아있는 우주 비행사는 현재 Fedor와 비슷한 RTK를 동반 할 수 있습니다. 그러한 임무에서 원격 제어 시스템을 독립적으로 사용하는 것은 무선 신호 전송 길이로 인해 어려울 수 있습니다.
따라서 ISS의 Skybot F-850 / FEDOR의 현재 테스트는 다소 간결 해 보이지만 미래를 향한 길을 열어줍니다. 미래에 새로운 중요한 프로젝트가 만들어 질 것으로 예상되는 경험이 축적되고 있습니다.
“Fedor”는 8 월에 27의 ISS에 도착했으며 9 월에 6로 출발 할 예정입니다. 남은 날 동안 우주 비행사는 로봇의 실제 기능을 결정하는 데 필요한 다양한 종류의 실험을 수행해야합니다. 다음으로 새로운 공간 설계 단계가 예상되는데, 그 결과 복잡한 공간이 특수 공간 문제를 해결하는 데 더욱 효과적이 될 것입니다.
F-850의 다음 비행 또는 수정 된 버전의 궤도는 20 년 초 몇 년 안에 예상됩니다. RTK가 두 번째 시작 전에 어떤 변화를 겪을지는 추측 할 수 있습니다. 우주 산업의 대표자들은 몇 가지 소망과 가정을 언급했지만 어느 것이 실제 구현에 도달할지는 아직 명확하지 않습니다.
일반적으로 현재 Fedor 프로젝트의 전반적인 성공은 상당히 심각해 보입니다. 국내 최초의 의인화 로봇은 이미 지상에서 오랫동안 성공적으로 개발되어 이제는 국제 우주 정거장에 처음으로 제공됩니다. 실제 조건에서는 기본 기능과 기술을 확인합니다.
현재의 실험은 상대적 단순성에도 불구하고 국내 우주 로봇 기술의 발전을위한 토대를 마련했습니다. 미래의 현재 형태의 Skybot F-850의 개발은 ISS의 재 장비 및 새로운 스테이션의 생성을 보장 할뿐만 아니라 미래의 행성 간 탐험의보다 효율적인 조직 구성을 허용하는 새로운 프로젝트에서 사용될 것입니다. 그러나 이러한 목표를 달성하기 전에 현재 테스트 프로그램을 완료하고 숙련 된 RTK를 집으로 돌려 보내야합니다.

Fedor가 탑승 한 로켓 발사
최초의 러시아어
러시아 "Fedor"는 최초의 의인화가 될 시간이 없었습니다. 로봇 ISS를 타고. 2011년 NASA에서 개발한 Robonaut 2 제품이 우주정거장으로 인도되었습니다. 그러나 F-850은 테스트에 도달했을 뿐만 아니라 우주에 도달한 최초의 러시아 개발품입니다.
이야기 FEDOR는 Advanced Research Foundation이 다목적 의인화 로봇 시스템 설계를 시작했을 때 2014에서 시작되었습니다. 이러한 시스템의 개발은 FPI와 NPO Android Technique에 의해 수행되었습니다. 처음에이 제품은 응급 상황에 적합하도록 설계되었으며 인간에게 위험한 조건에서 작동해야했습니다. 이 프로젝트는 기존 SAR-400 및 SAR-401 로봇의 개발을 기반으로했습니다.
기본 플랫폼을 만드는 것은 몇 가지 어려움과 관련이 있지만 2015-16에 있습니다. 프로젝트가 새로운 단계로 이동했습니다. 그런 다음 우주에서 운영하기 위해 복잡한 버전의 복합체를 만들라는 제안이있었습니다. 이러한 로봇을 "Fedor"또는 FEDOR (Final Experimental Demonstration Object Research)라고합니다. 얼마 전, 단지 이름이 Skybot F-850로 바뀌 었습니다.
8 월 22에서 새로운 RTK가 ISS로 전송되었습니다. 역행 비행 중에 일부 오작동이 발생하여 도킹이 8 월 27에서만 가능했습니다. ISS 승무원은 이미 실제 조건에서 새로운 기술을 익히기 시작했습니다.
궤도에서 작업
가까운 장래에 "Fedor"는 오래 가지 않았지만 궤도에서 열심히 일할 것입니다. 그의 참여와 과학 프로그램의 세부 사항은 아직 공개되지 않았지만 일부 정보가 이미 나타났습니다. 일반적으로 사람이 제어하는 로봇이 다른 물체와 상호 작용하고 특정 작업을 수행하는 다양한 종류의 작업이 계획됩니다.

로봇과 함께 소위 복사 유형 마스터 장치-작업자를위한 특수 "외골격"으로 로봇의 움직임을 제어 할 수 있습니다. ZUKT를 사용하면 작업자는 로봇의 눈으로 모니터링 할 수있을뿐만 아니라 조작기를 완벽하게 제어 할 수 있습니다. 현재 비행의 틀 내에서 모든 실험은 F-850와 ZUKT의 조합을 사용하여 수행됩니다.
궤도에서 첫 날에 새로운 로봇은 여러 실험에 참여할 수 있다고보고되었다. "Fedor"는 다양한 수공구 및 스테이션의 일부 장비로 작업 할 수있는 능력을 보여주었습니다. 유망한 RTK가 다양한 종류의 다양한 기능을 보여줄 새로운 실험이 예상됩니다.
동시에, 우리는 로봇이 우주 공간으로 철수하는 것에 대해 이야기하고 있지 않습니다. Roscosmos 책임자 인 Dmitry Rogozin은 최근에 이러한 실험이 다음 번 Fedor의 ISS 비행 중에 수행 될 것이라고 밝혔다. 현재 계획에 따르면이 비행은 2-3 년 후에 만 이루어질 것입니다. 이 시점까지 단지는 시운전 결과에 따라 완공되며 공간의 특성 조건을보다 완벽하게 충족시킬 수있을 것이다.
한편 Skybot F-850는 국제 우주 정거장 내에서만 사용됩니다. 필요한 모든 실험과 실험을 일주일 이상 수행했습니다. 9 월 6에서 Soyuz MS-14 우주선은 ISS에서 도킹 해제되어 Fedor로 돌아 왔습니다. 그런 다음이 RTK 개발자는 수집 된 정보를 분석해야하므로 새로운 요구 사항을 충족하기 위해 프로젝트를 마무리 할 수 있습니다.
위대한 잠재 고객
지금까지 FEDOR / F-850는 실험실, 테스트 사이트 및 ISS에서 테스트하도록 설계된 프로토 타입의 상태를 가지고 있습니다. 우주에서의 이러한 시스템의 완전한 구현은 아직 멀었지만이 과정에 대한 전망은 이미 명확하다. 의인화 로봇 시스템의 외관, 개발 및 구현은 국내외 세계 우주 산업에 큰 관심을 끌고 있습니다.
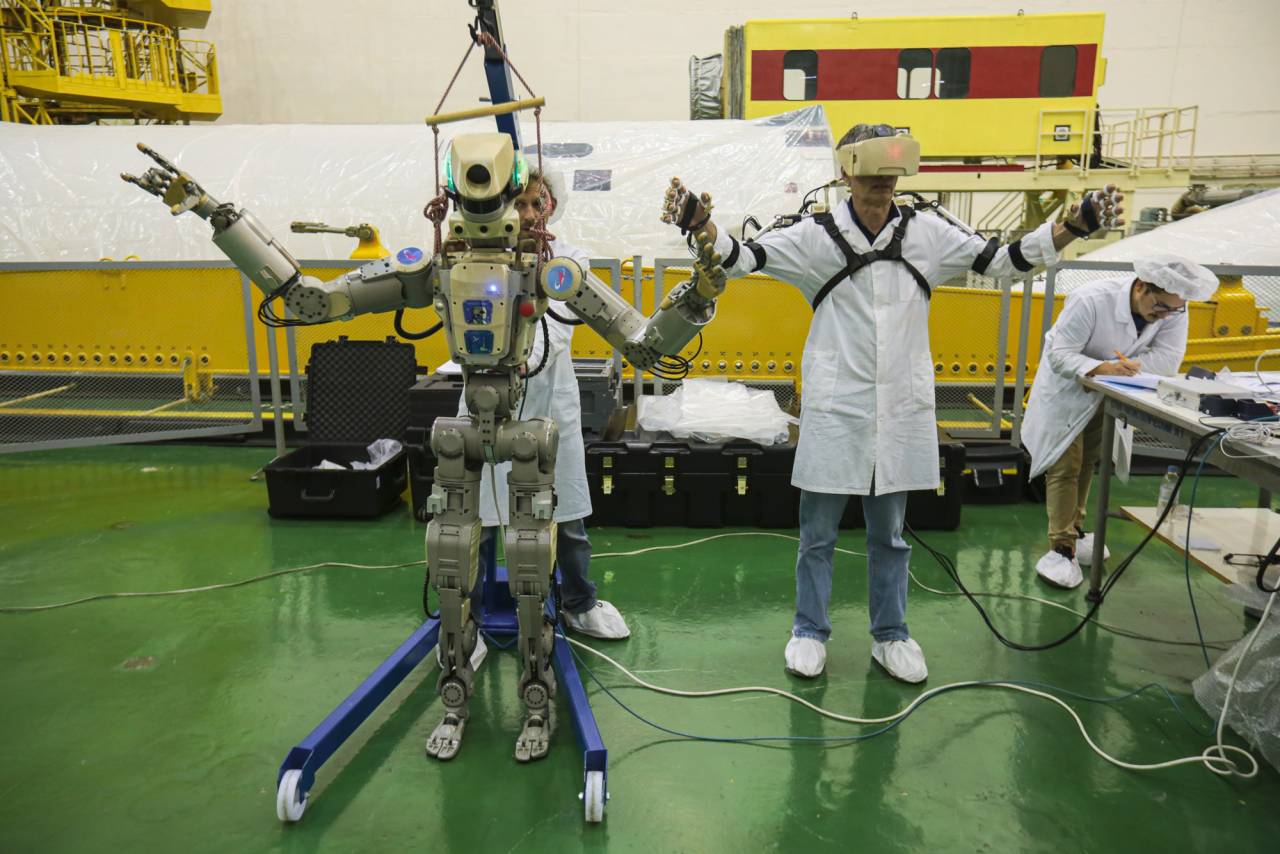
ZUKT와 로봇 및 연산자
프로젝트의 주요 목표는 Fedor였습니다. 위험한 상황에서 일할 때 사람을 대체 할 수있는 RTK를 만들었습니다. 우주 프로그램의 맥락에서 이것은 주로 로봇이 우주 공간으로 들어가 우주 비행사를 위해 그곳에서 작업 할 수 있음을 의미합니다.
이는 작업 준비 및 수행을 크게 단순화 할 수 있습니다. RTK는 음식과 휴식이 필요하지 않으므로 더 오랫동안“선외”를 유지할 수 있습니다. 우주 비행사 운영자는 최적의 모드를 관찰하면서 서로 교체 할 수 있습니다. 또한 지구상의 운전자가 로봇을 제어 할 수 있습니다. 덕분에 우주 비행사가 어려움을 겪는 경우 외부로부터보다 완벽한 지원을받을 수 있습니다.
관계자들은 향후 ISS 외부에서 운영하기 위해 F-850의 특별한 수정이 이루어질 수 있다고 밝혔다. 이러한 RTK는 스테이션 표면에서 작동 할 수 있도록 최적화 된 운송 수단을 제공받으며 지속적으로 외부에있을 수 있으며 명령이 수행되기를 기다립니다. 국제 우주 정거장에 대한 그러한 복합체의 가치는 분명합니다.
원격 제어 로봇도 ISS 내부에서 유용 할 수 있습니다. 그것의 도움으로 지구의 전문가들은 다양한 연구와 실험에 직접 참여할 수 있습니다. 이를 통해 승무원의 업무 부담을 줄일 수있을뿐만 아니라 관련 과학자 및 엔지니어의 참여로 더 많은 범위의 연구를 수행 할 수 있습니다.
기존의 유망한 우주선에서 로봇을 작동 할 때 몇 가지 장점이 있습니다. 특히,“연맹”또는“연맹”의 승무원에게“연맹”을 관찰자로 소개하는 것이 제안된다. 그는 오프라인 작업을 통해 들어오는 모든 데이터를 신속하게 분석하고 살아있는 우주 비행사의 관심을 특정 뉘앙스와 요소에 끌어들일 수 있습니다.
장기적으로 스트레스에 대한 로봇의 저항은 새로운 우주 임무에서 유용 할 수 있습니다. 사람을 다른 천체로 보내는 것은 알려진 어려움과 관련이 있으며 휴머노이드 로봇을 사용하면 그러한 작업이 크게 단순화됩니다. 미래의 달 또는 화성 탐사에서 살아있는 우주 비행사는 현재 Fedor와 비슷한 RTK를 동반 할 수 있습니다. 그러한 임무에서 원격 제어 시스템을 독립적으로 사용하는 것은 무선 신호 전송 길이로 인해 어려울 수 있습니다.
따라서 ISS의 Skybot F-850 / FEDOR의 현재 테스트는 다소 간결 해 보이지만 미래를 향한 길을 열어줍니다. 미래에 새로운 중요한 프로젝트가 만들어 질 것으로 예상되는 경험이 축적되고 있습니다.
가까운 미래
“Fedor”는 8 월에 27의 ISS에 도착했으며 9 월에 6로 출발 할 예정입니다. 남은 날 동안 우주 비행사는 로봇의 실제 기능을 결정하는 데 필요한 다양한 종류의 실험을 수행해야합니다. 다음으로 새로운 공간 설계 단계가 예상되는데, 그 결과 복잡한 공간이 특수 공간 문제를 해결하는 데 더욱 효과적이 될 것입니다.
F-850의 다음 비행 또는 수정 된 버전의 궤도는 20 년 초 몇 년 안에 예상됩니다. RTK가 두 번째 시작 전에 어떤 변화를 겪을지는 추측 할 수 있습니다. 우주 산업의 대표자들은 몇 가지 소망과 가정을 언급했지만 어느 것이 실제 구현에 도달할지는 아직 명확하지 않습니다.
일반적으로 현재 Fedor 프로젝트의 전반적인 성공은 상당히 심각해 보입니다. 국내 최초의 의인화 로봇은 이미 지상에서 오랫동안 성공적으로 개발되어 이제는 국제 우주 정거장에 처음으로 제공됩니다. 실제 조건에서는 기본 기능과 기술을 확인합니다.
현재의 실험은 상대적 단순성에도 불구하고 국내 우주 로봇 기술의 발전을위한 토대를 마련했습니다. 미래의 현재 형태의 Skybot F-850의 개발은 ISS의 재 장비 및 새로운 스테이션의 생성을 보장 할뿐만 아니라 미래의 행성 간 탐험의보다 효율적인 조직 구성을 허용하는 새로운 프로젝트에서 사용될 것입니다. 그러나 이러한 목표를 달성하기 전에 현재 테스트 프로그램을 완료하고 숙련 된 RTK를 집으로 돌려 보내야합니다.
정보