XNUMX 세대 UAV를 탑재 한 항공기 운반 순양함의 개념

1. 소개
В 세 번째 기사 시리즈의 관점은 우리 항공 모함 인 Kuznetsov 제독이 이미 너무 오래되어 수리하는 대신 최신 선박을 만드는 것이 낫다는 사실에 근거하여 입증되었습니다. 23900 개의 UDC pr. 50 Ivan Rogov를 놓을 때 각각의 주문 비용은 Kuznetsov 수리 비용보다 적은 XNUMX 억 루블이 될 것이라고 발표되었습니다. 또한 UDC 선체를 기반으로 항공기 운반 순양함 (AK)을 주문하는 경우 AK 선체의 가격은 UDC 선체보다 많지 않습니다.
지난 15 년 동안 우리는 주기적으로 Storm 항공 모함의 프로젝트를 발표했는데, 이는 질량과 크기 측면에서 American Nimitz에 가깝습니다. Storm의 10 억 달러 가치는 전체 아이디어를 죽입니다. 실제로 스톰 외에도 AUG, Yak-44 조기 경보기 (AWACS) 및 항공 날개 조종사를위한 훈련 단지를 구축해야합니다. 이러한 비용은 우리의 예산이 부족한 함대 분명히 작동하지 않습니다.
2. AK 개념의 기본 매개 변수
저자는 조선 또는 항공기 제작 전문가가 아닙니다. 기사에 제공된 기술적 특성은 대략적인 것이며 알려진 샘플과 비교하여 얻습니다. 전문가가 수정하고 싶다면 제안의 품질이 크게 향상되며 국방부는이를 무시할 수 없습니다.
2.1 AK의 주요 작업
• 항공 원격 극장에 대한 상륙 작전을 포함한 지상 작전 지원. AK에서 최대 500-600km의 작업 깊이;
• 적 특공대에 대한 공습 시작;
• 최대 반경 1000km 이내의 해상 상황 정찰;
• AK 전방 최대 100km 범위에서 자력계를 갖춘 무인 항공기(UAV)를 사용하여 잠수함을 검색합니다.
작업 범위의 한계는 AK가 AUG-s를 공격해서는 안되며, 적의 영토를 공격 할 때 항공기의 UAV가 전투기 (IB)가 기반을 둔 비행장에 300km 미만의 거리에 접근해서는 안된다는 것입니다. UAV 그룹이 적의 IS의 예상치 못한 공격을받는 경우 UAV는 AK를 향해 이동하면서 장거리 공중 전투 만 수행해야합니다.
2.2 무게 및 치수
가능한 한 AK의 비용을 줄이기 위해 UDC의 크기에 해당하는 25 톤-220 * 33m의 총 배기량을 제한 할 것입니다. 또한 조선사는 슬립 웨이, 드라이 도크 등의 크기를 고려해야합니다. 수익성이 더 높은 것을 평가하십시오 :이 크기를 유지하거나 AK-240 * 28 m에 대해 더 편리한 것으로 교체하십시오. 활에 스프링 보드가 있어야합니다. 240 * 28m를 선택한다고 가정합니다.
2.3 방공 시스템 유형 선택
단거리 대공 방어 시스템 (MD) 만 항공 모함에 설치된 일반적인 버전은 러시아에서는 거의 사용되지 않습니다. 우리는 자체 URO 구축함을 가지고 있지 않으며, Gorshkov 제독 호위함도 두껍지 않으며 미사일 방어 문제를 해결하지 못합니다. 따라서 AK에 본격적인 장거리 방공 시스템을 설치해야합니다. 이러한 방공 시스템의 레이더 컴플렉스 (RLC) 출현에 대한 제안이 주어집니다. 이전 기사에서, 여기서 미사일 방어 레이더에는 4-70 평방 미터의 면적을 가진 100 개의 능동 위상 안테나 어레이 (AFAR)가 있어야합니다. 또한 상부 구조는 다기능 (MF) 레이더의 안테나, KREP (Electronic Countermeasures Complex) 및 상태 인식을 수용해야합니다. UDC와 같이 측면에 위치한 상부 구조에서는 이러한 영역을 찾을 수 없습니다.
2.4 상부 구조 설계
갑판의 전체 너비에 걸쳐 상부 구조를 배치하고 가능한 한 선박의 선수에 가깝게 배치하는 옵션을 고려하는 것이 좋습니다. 높이가 7m 인 상부 구조물의 하부는 비어 있습니다. 또한 빈 구획의 앞뒤 부분은 게이트 날개로 닫힙니다. 이륙 및 착륙 중에 도어가 열리고 약 5 °의 약간 확장되어 선박 측면을 따라 설치됩니다.
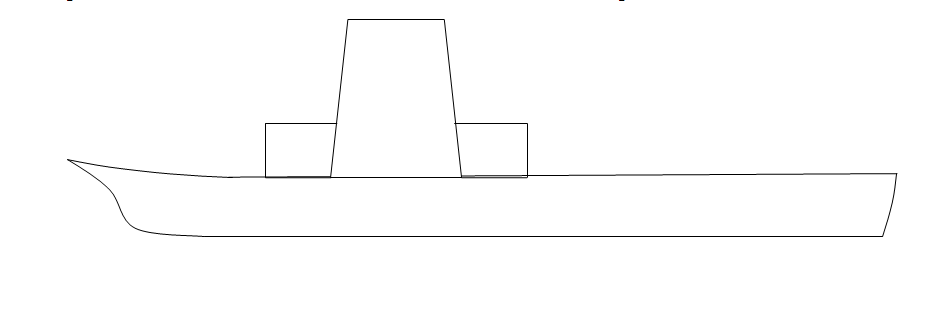
이 확장은 착륙 중 UAV가 활주로 중앙에 비해 강하게 변위되면 플레어가 상부 구조물 벽에 직접 날개 충돌을 방지하는 경우 입구 플레어를 형성합니다. 또한 사고 발생시 상부 구조물 빈 부분의 천정에 소화 장치 노즐을 설치한다. 결과적으로 활주로의 폭은 상부 구조물의 하부 폭에 의해서만 제한되고 26m에 달하여 날개 길이가 최대 18-19m, 용골 높이가 최대 4m 인 UAV를 심을 수 있습니다. , 이는 지속적으로 준비되어 있으며 아마도 따뜻한 엔진과 함께 있습니다.
갑판 위 상부 구조물의 높이는 16m 이상이어야합니다. 상부 구조물의 측면에있는 안테나 배치는 Fig. 1 이전 기사에서... 상부 구조의 전면과 후면에서 AFAR 미사일 방어 레이더는 측면과 같은 방식으로 위치 할 수 없습니다.이 AFAR은 게이트 위에 위치하며이를 수용 할 수있는 상부 구조의 전체 높이가 충분하지 않기 때문입니다. 우리는이 AFAR를 90 ° 회전시켜야합니다. 즉, AFAR의 긴면을 수평으로, 짧은면을 수직으로 배치해야합니다.
위협 기간 동안 3 개의 중거리 미사일 (SD) R-4-77 또는 섹션 1에 설명 된 12 개의 단거리 미사일 (MD)이 장착 된 IS UAV 5 쌍을 갑판의 선미에 배치해야합니다. 그러면 사용 가능한 활주로 길이가 200m로 줄어 듭니다.
3. 사용되는 UAV의 개념
공중전은 예외가 될 것이라고 가정하기 때문에 IS UAV는 아음속이어야합니다. 소형 항공 모함의 경우 소형 UAV를 보유하는 것도 유익합니다. 그러면 격납고에서 더 쉽게 운반 할 수 있고 더 짧은 활주로가 필요하며 필요한 데크 두께가 줄어 듭니다. IS UAV의 최대 이륙 중량을 4 톤으로 제한하면 날개에 최대 40 대의 UAV를 넣을 수 있습니다. 그러한 UAV의 최대 전투 하중이 800-900 kg이고 섀시가 낮기 때문에 그러한 질량의 미사일 하나를 동체 아래에 매달 수 없다고 가정하십시오. 따라서 최대 하중은 두 개의 450kg 로켓으로 구성되어야합니다. 또한 UAV의 이륙 중량을 늘리는 것이 불가능합니다. 그렇지 않으면 AK의 크기를 늘려야하며 일반 항공 모함으로 바뀝니다.
일반적으로 450kg 미만의 공대지 (VP) 미사일은 발사 범위가 짧고 심지어 SD SAM 시스템의 발사 범위를 초과하는 범위에서는 사용할 수 없습니다. V-V 미사일 중 발사 범위 77km의 SD SD R-1-110 미사일 만 사용할 수 있습니다. 미국 AMRAAM 미사일 발사기의 발사 거리가 150km라는 점을 감안하면 장거리 공중전에서 승리하는 것은 문제가 될 것입니다. UR BD R-37은 무게가 600kg이기 때문에 적합하지 않습니다. 따라서 5 장에서 논의한 글라이드 폭탄 (PB) 및 글라이드 미사일 (GL)과 같은 대체 무기의 개발이 필요합니다.
IS UAV의 작은 질량으로 인해 유인 IS에 전체 장비 세트를 배치 할 수 없습니다. 예를 들어 레이더 및 전자 대책 (KREP)과 같은 결합 된 옵션을 개발하거나 UAV를 쌍으로 결합해야합니다 : 하나의 레이더에서 다른 하나는 다양한 광학 및 전자 지능.
UAV에 근접 공중 전투를 수행하는 임무가 주어지면 UAV는 유인 IS의 능력을 분명히 초과하는 과부하 (예 : 15g)를 가져야합니다. 운영자와의 모든 측면에서 재밍 방지 통신 회선도 필요합니다. 결과적으로 전투 부하가 더 많이 떨어집니다. 원거리 전투와 5g 과부하로 자신을 제한하는 것이 더 쉽습니다.
지역 갈등에서는 중요하지 않은 표적을 공격해야하는 경우가 많으며 비용이 너무 낮아 고정밀 미사일의 사용이 정당하지 않고 너무 비싸고 미사일의 질량이 너무 큽니다. 활공 탄약을 사용하면 무게와 가격을 모두 줄일 수 있으며 발사 범위가 늘어납니다. 비행 고도는 가능한 한 높아야합니다.
AK의 정보 지원은 두 번째 유형의 UAV-조기 경보 레이더 (AWACS)에 의해 제공됩니다. 긴 작업 시간 (6 ~ 8 시간)을 가져야하며, 질량이 5 톤으로 증가해야한다고 가정하고, AWACS UAV는 질량이 작음에도 불구하고 질량이 23 톤인 Hawkeye AWACS와 거의 동일한 특성을 제공해야합니다.
다음 기사는 UAV AWACS 주제에 대해 다룰 것입니다. 여기서 제안한 AWACS와 기존 AWACS의 차이점은 레이더 안테나가 대부분의 UAV 측면을 점유하고 있다는 점에 주목할 만하다. 측면 AFAR을 가리지 않는 상부 V 자 날개를 가진 특수 유형의 UAV가 개발되고있다.
4. UAV IB의 모습
American Global Hawk UAV는 여객기의 엔진을 사용하는데, 그 중 차가운 부분은 희박한 분위기에서 작동하도록 수정되었습니다. 그 결과, 질량 20 톤, 날개 길이 14m, 속도 35km / h로 비행 고도 630km에 도달했습니다.
IB UAV의 경우 날개 길이는 12-14m를 넘지 않아야하며 동체 길이는 약 8m입니다. 그런 다음 전투 부하와 연료 가용성에 따라 비행 고도를 16-18km로 줄이고 순항 속도를 850-900km / h로 늘려야합니다. ...
UAV의 추력 대 중량 비율은 최소 60m / s의 상승률을 얻기에 충분해야합니다. 비행 시간은 최소 2,5 ~ 3 시간입니다.
4.1 IS 레이더의 특성
장거리 공중전을 수행하기 위해 레이더에는 두 개의 AFAR (활과 꼬리)이 있습니다. 동체의 정확한 치수는 향후 결정될 예정이지만 이제 AFAR 레이더의 지름이 70cm라고 가정합니다.
레이더의 주된 임무는 5,5cm 범위의 주 AFAR을 사용하는 다양한 표적을 탐지하는 것이며, 적의 방공 레이더를 억제해야합니다. 작은 UAV에 충분한 전력의 KREP를 배치하는 것은 매우 어렵 기 때문에 KREP 대신 동일한 레이더를 사용합니다. 이를 위해서는 억제 된 레이더보다 더 넓은 AFAR 파장 범위를 제공 할 필요가 있습니다. 대부분의 경우 작동합니다. 예를 들어, 패트리어트 방공 시스템 레이더는 주 AFAR에 의해 보호되는 5,2-5,8cm 범위에서 작동합니다. 적 IS 레이더와 이지스 유도 레이더를 억제하려면 3-3,75cm의 AFAR 범위가 필요하므로 특정 임무를 수행하기 전에 필요한 범위의 AFAR 레이더를 장착해야합니다. 5,5cm 범위의 기수 AFAR와 꼬리 3 ~ 9cm를 설치할 수도 있으며 나머지 레이더 장치는 범용으로 유지됩니다. 레이더의 에너지 포텐셜은 KREP 포텐셜보다 적어도 10 배 더 높습니다. 따라서 재머로 사용되는 IS는 안전한 지역에서 작동하는 그룹을 커버 할 수 있습니다. Aegis MF 레이더를 억제하려면 XNUMX-XNUMXcm 범위의 AFAR이 필요합니다.
4.2 레이더의 설계 및 특성
AFAR 레이더에는 클러스터로 결합 된 416 개의 트랜시버 모듈 (TPM)이 포함되어 있습니다 (정사각형 매트릭스 4 * 4 PPM. 매트릭스 크기 11 * 11cm). 전체적으로 AFAR에는 26 개의 클러스터가 있습니다. 각 PPM은 25W 송신기와 사전 수신기로 구성됩니다. 16 개 수신기의 출력에서 나오는 신호는 합산되어 수신 채널에서 최종적으로 증폭되며 출력은 아날로그-디지털 변환기에 연결됩니다. ADC는 즉시 200MHz 신호를 샘플링합니다. 신호를 디지털 형식으로 변환 한 후 신호 프로세서로 들어가 간섭에서 필터링되고 대상 감지 또는 부재 여부를 결정합니다.
각 APAR의 질량은 24kg입니다. AFAR에는 액체 냉각이 필요합니다. 냉장고의 무게는 7kg입니다. 두 개의 AFAR이있는 공중 레이더의 총 중량은 100kg으로 추정됩니다. 전력 소비-5kW.
AFAR의 작은 영역은 일반적인 IS와 동일한 공중 레이더의 특성을 얻을 수 없습니다. 예를 들어 유효 반 사면 (EOC)이있는 IS의 감지 범위는 3 평방 미터입니다. 일반적인 검색 영역에서 60 ° * 10 °는 120km와 같습니다. 각도 추적 오류는 0,25 °입니다.
이러한 지표를 사용하면 장거리 공중전에서 승리하는 것을 믿기 어렵습니다.
4.3 레이더 범위를 늘리는 방법
탈출구로 그룹 작업 사용을 제안 할 수 있습니다. 이를 위해서는 UAV간에 고속 통신 회선이 있어야합니다. 간단히 말해서, 하나의 레이더 클러스터가 UAV의 측면에 배치되면 이러한 라인이 실현 될 수 있습니다. 그러면 전송 속도는 최대 300km 거리에서 20Mbps에 도달 할 수 있습니다.
4 대의 IS UAV가 임무를 수행 할 때의 예를 고려하십시오. 4 개의 레이더가 모두 동시에 공간을 스캔하면 신호 대상을 조사하는 전력이 4 배 증가합니다. 모든 레이더가 동일한 주파수에서 엄격하게 펄스를 방출한다면 4 배 출력의 레이더가 작동 중이라고 가정 할 수 있습니다. 각 레이더가 수신하는 신호도 16 배가됩니다. 수신 된 모든 신호가 그룹의 선두 UAV에 전송되어 거기에 합산되면 전력이 8 배 더 증가합니다. 결과적으로 장비의 이상적인 작동으로 1,65 개의 레이더 레이더가 수신하는 신호 전력은 단일 레이더의 신호 전력보다 200 배 더 커집니다. 실제 장비에서는 장비의 품질에 따라 항상 합계 손실이 발생합니다. 그러한 저작물에 대해 알려진 것이 없기 때문에 특정 데이터를 인용 할 수 없지만 손실 계수를 절반으로 추정하는 것은 상당히 타당합니다. 그러면 전력이 XNUMX 배 증가하고 감지 범위가 XNUMX 배 증가합니다. 결과적으로 IS 감지 범위는 AMRAAM 미사일 발사기의 발사 범위를 초과하는 XNUMXkm로 증가하고 공중 전투가 가능합니다.
5. 유도 활공 탄약
활공하는 폭탄과 미사일 (PB 및 PR) 만 고려하십시오.
PBU-39는 원래 고정 된 목표물을 타격하기 위해 고안되었으며 GPS 신호 또는 관성에 의해 유도되었습니다. PB의 비용은 적당했습니다-$ 40.
분명히 나중에 직경 20cm의 PB 케이스는 지상 기반 CRED에서 방출되는 간섭으로부터 GPS 수신기를 보호 할 수 없다는 것이 밝혀졌습니다. 그런 다음 지침이 개선되기 시작했습니다. 마지막 수정에는 이미 활성 시커가 있습니다. 조준 오류는 1m로 감소했지만 PB 가격은 200 달러로 증가하여 지역 전쟁에 적합하지 않습니다.
5.1 PB 출현 제안
GLONASS 안내를 포기하고 PB 명령 안내로 전환 할 수 있습니다. 이는 주변 물체의 반사 배경, 즉 무선 콘트라스트에 대해 레이더로 표적을 감지 할 수있는 경우 가능합니다. PB를 겨냥하려면 다음을 설치해야합니다.
• 최소 10초 동안 PB의 직선 운동을 유지할 수 있는 관성 항법 시스템;
• 저고도 고도계(300m 미만);
• 레이더 요청 신호를 다시 중계하는 무선 응답기.
레이더가 세 가지 모드 중 하나에서 지상 표적을 감지 할 수 있다고 가정 해 보겠습니다.
• 대상이 너무 커서 물리적 빔 모드에서 표면의 반사 배경, 즉 IB가 대상을 향해 직접 비행할 때 감지할 수 있습니다.
• 표적은 작고 합성 빔 모드에서만 감지할 수 있습니다. 즉, 표적을 몇 초 동안 측면에서 관찰할 때입니다.
• 대상은 작지만 10-15km/h 이상의 속도로 이동하며 이 기능으로 식별할 수 있습니다.
안내의 정확성은 하나 또는 한 쌍의 IS가 안내를 수행하는지 여부에 따라 달라집니다. 단일 레이더는 1-2m의 오차로 PB까지의 범위를 정확하게 측정 할 수 있지만 방위각은 0,25 °의 단일 측정으로 큰 오차로 측정됩니다. PB 1-3 초를 관찰하면 측면 오차가 범위에서 PB까지 0,0005-0,001로 감소 할 수 있습니다. 그런 다음 약 100km의 거리에서 측면 오류는 50-100m와 같으며 지역 표적에서만 발사하는 데 적합합니다.
10-20km 간격으로 한 쌍의 IS가 있다고 가정 해 봅시다. IS의 상호 좌표는 GLONASS의 도움으로 매우 정확하게 알려져 있습니다. 그런 다음 PB에서 IS까지의 거리를 측정하고 삼각형을 만들어 오차를 10m로 줄일 수 있습니다.
더 높은 안내 정확도가 필요한 경우 1km 이상의 거리에서 표적을 감지 할 수있는 텔레비전과 같은 시커를 사용해야합니다. 선박의 운영자에게 TV 영상을 전송하는 옵션을 고려할 수 있습니다.
5.2 활공 미사일 사용
공중전을 수행하기 위해 선택된 전술은 적의 IS 공격이 감지되면 장거리에서 그를 발사하고 즉시 돌아서 AK를 향해 가야 함을 확립합니다. 미사일 BD R-37은 600kg의 질량으로 인해 완전히 부적합하며 UR SD R-77-1은 부분적으로 적합합니다. 그들의 질량도 190kg으로 작지 않고 발사 범위는 110km로 너무 작습니다. 따라서 PR 사용 가능성을 고려할 것입니다.
UAV가 고도 17km에 있다고 가정합니다. 고도 500km에서 순항하는 초음속 1800m / s (15km / h)로 날아가는 IS의 공격을 받으십시오. IS가 60 ° 각도로 UAV를 공격한다고 가정 해 보겠습니다. 그런 다음 UAV는 IS를 피하기 위해 120 ° 회전해야합니다. 250m / s의 비행 속도와 4g의 과부하에서 회전하는 데 12 초가 걸립니다. 명확성을 위해 PR 질량을 60kg으로 설정하여 UAV가 12 PR의 탄약 부하를 가질 수 있도록합니다.
전쟁의 전술을 고려하십시오. IS가 UAV에 가장 불리한 변형 인 외부 제어 센터에서 UAV를 공격하게하십시오. 그런 다음 UR이 시작되기 전에 IS는 레이더를 켜지 않으며 자체 UAV의 레이더로만 감지 할 수 있습니다. 그룹의 온보드 레이더 200 개의 그룹 스캔을 사용하더라도 감지 범위는 기존 IS-35km에만 충분합니다. F-90의 경우 범위가 35km로 떨어집니다. 15km 거리에서 500km 고도에서 비행하는 F-XNUMX를 감지 할 수있는 AK 미사일 방어 레이더가 여기에서 도움을받을 수 있습니다.
UAV를 철회 할 필요성에 대한 결정은 IS까지의 거리가 120-150km로 줄어들 때 이루어집니다. 전투가 15km 이상의 고도에서 발생한다고 생각하면 구름이 거의 없습니다. 그런 다음 TV 또는 IR 카메라를 사용하는 UAV는 IS가 UR을 시작했음을 기록 할 수 있습니다. IS가 미사일 방어 레이더의 가시 영역에 있으면이 레이더로 미사일 방어 시스템의 발사도 감지 할 수 있습니다.
IS가 UR을 시작하지 않고 UAV에 계속 접근하면 UAV는 첫 번째 PR 쌍을 재설정합니다. PR에 떨어지는 순간 캐리어 윙이 열리고 주어진 방향으로 미끄러지기 시작합니다. 이때 UAV는 계속 회전하고 PR이 꼬리 AFAR 영역에 있으면 추적을 위해 PR을 캡처합니다. 한 쌍의 PR이 IB를 틱 단위로 가져 가기 위해 최대 10km까지 흩어져 계획을 계속합니다. PR에서 IS까지의 거리가 30-40km로 줄어들면 운영자는 PR 엔진을 시작하라는 명령을 내리면 3-3,5M까지 가속됩니다. 계획 중에 PR이 1-3km의 고도를 잃을 것이라는 사실은 무시할 수 있습니다. PR의 에너지는 높이 손실을 보상하기에 충분하기 때문입니다. 트랜스 폰더를 PR에 설치해야 PR을 높은 정확도로 전달하는 데 도움이됩니다. PR에 대한 레이더 시커는 필요하지 않습니다. 간단한 IR 또는 TV 시커 만 있으면 충분합니다.
추격 과정에서 IS가 약 50km 거리에서 UAV에 접근하면 UR을 시작할 수 있습니다. 이 경우 미사일 방어 모드에서 PR이 사용됩니다. PR은 평소와 같이 배출되지만 날개를 연 후 PR은 UR을 향해 회전 한 다음 엔진을 시동합니다. 충돌 경로에서 차단이 발생하기 때문에 광학 시커의 넓은 시야가 필요하지 않습니다.
참고 : AK 사용 전략을 논의하려면 먼저 제어 센터를 확보하는 방법을 고려해야합니다. 그러나 주요 정보원-해양 작전 극장에서 작동하는 AWACS UAV 구성 문제는 다음 기사에서 고려할 것입니다.
6. 결론
• 제안된 AK는 Storm 항공모함보다 몇 배나 저렴합니다.
• 비용 효율성 기준에 따르면 AK는 Kuznetsov를 크게 능가할 것입니다.
• 강력한 대공 방어 시스템은 AUG에 미사일 방어 및 대공 방어를 제공하고 UAV는 적 잠수함의 지속적인 탐지를 보장합니다.
• 활공탄은 표준 유도 미사일보다 훨씬 저렴하며 지역 분쟁 시 장기간 공중 엄호가 가능합니다.
• AK는 착륙 작전 지원에 최적입니다.
• AK UAV AWACS를 기반으로 다른 KUG의 제어 목적으로 사용될 수 있습니다.
• 개발된 AK, UAV, PB, PR을 성공적으로 수출할 수 있습니다.
정보