AMS "Luna-25"의 기술적 특징
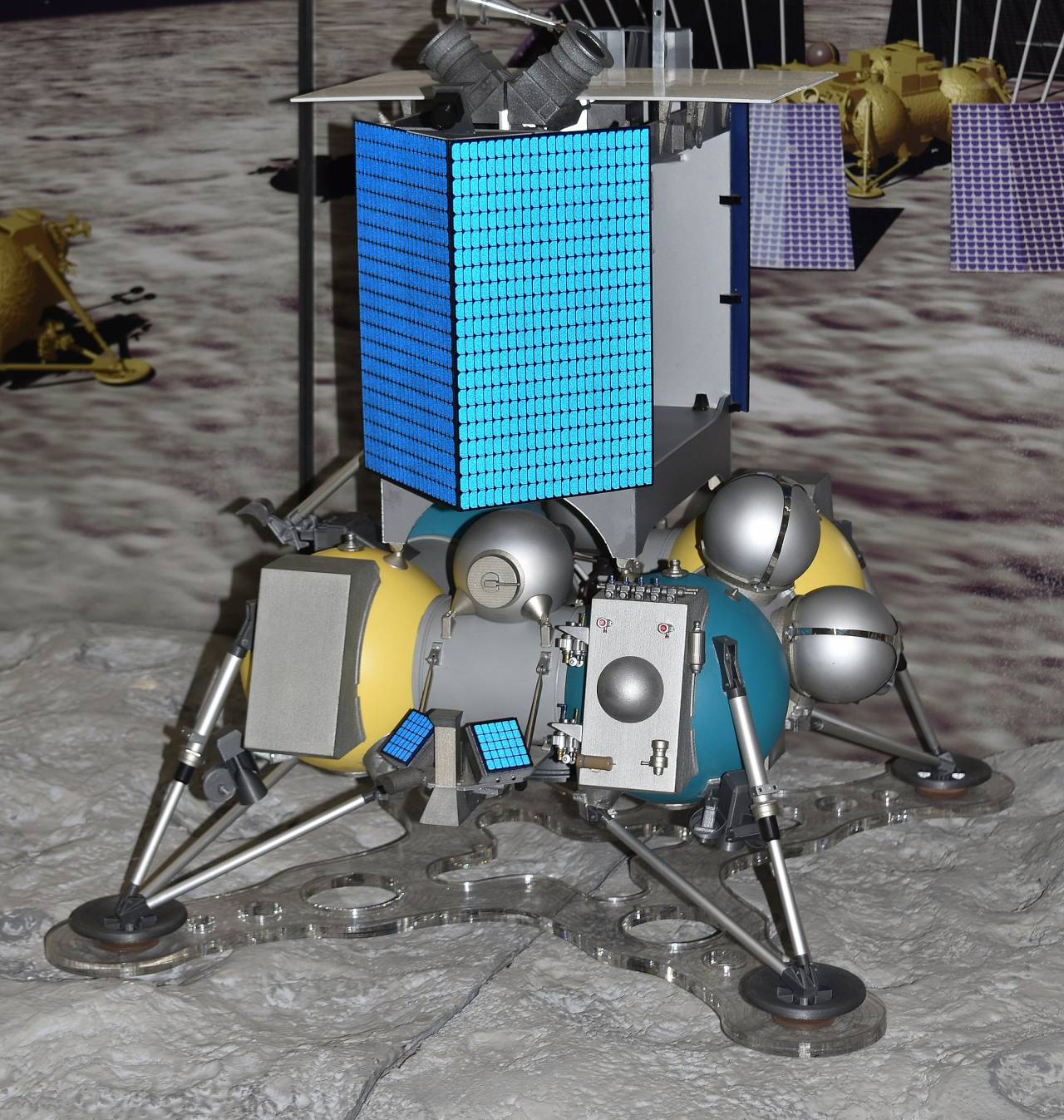
전시회 중 하나에서 AMS "Luna-25"의 모델, 2015
자동 행성간 정거장 '루나-25'의 발사는 내년 46월로 예정돼 있다. 국내 차량이 25년 만에 달에 착륙해 필요한 연구를 수행한다. 현재 Roskosmos 및 관련 기관은 향후 출시를 위한 다음 단계를 준비하고 있으며 상황은 낙관적입니다. Luna-XNUMX 프로젝트는 러시아 과학에 매우 중요하며 또한 기술적인 측면에서도 큰 관심을 받고 있습니다.
개발 중
"Luna-Globe"라고 불리는 미래의 달 AMS에 대한 작업은 2005년에 시작되었습니다. 몇 년 동안 프로젝트의 첫 번째 버전이 개발되었지만 2011년에는 전체 임무를 근본적으로 재건하기로 결정했습니다. 이러한 결정의 결과로 2013년 초에 그들은 다른 아키텍처, 다른 목표 및 목적을 가진 새로운 AMC 개발을 시작했습니다. 동시에 이전 탐험과 유추하여 새로운 이름 "Luna-25"가 나타났습니다.
향후 몇 년 동안 NPO. Lavochkina 및 기타 조직은 스테이션의 기술적 외관을 결정하고 프로젝트 개발도 완료했습니다. 동시에 과학 도구가 만들어졌습니다. 2016년부터 다양한 목적을 위해 개별 부품 및 모델에 대한 다양한 테스트가 수행되었습니다. 스테이션 자체 및 계측에 대한 설계 및 기타 작업의 주요 부분은 2019-20년에 완료되었습니다.
현재까지 NPO. 가게 주인은 "Luna-25"의 건설을 완료하고 현재 필요한 장비를 설치하고 다양한 테스트를 수행하고 있습니다. 또한 특정 단점을 식별하고 제거합니다. 예를 들어, 현재 속도 및 드리프트 측정 장치 DISD-LR의 디버깅이 수행되고 있으며 며칠 내에 완료될 것입니다.
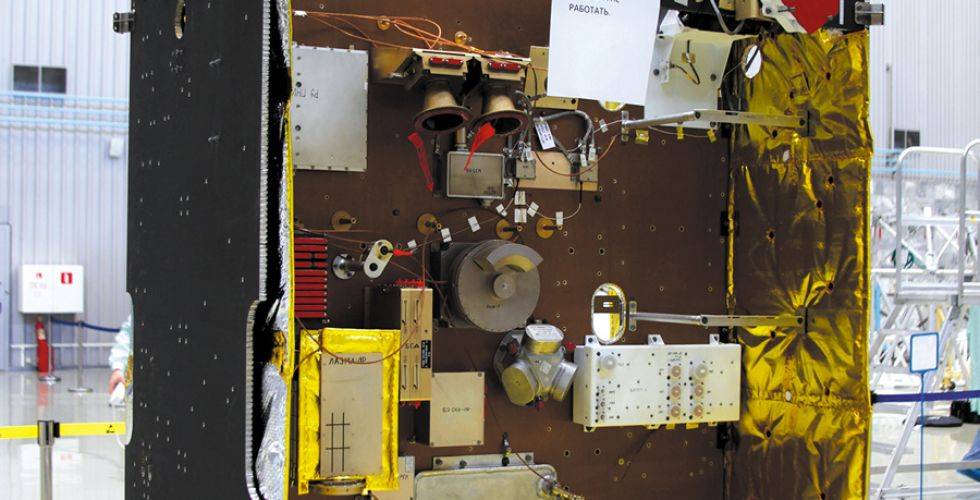
조립 단계 중 하나의 스테이션
이 모든 작업에는 몇 개월이 더 걸릴 것입니다. 내년 봄, 스테이션은 Vostochny 우주 비행장으로 보내질 것입니다. 며칠 전 발사 시 사용할 프레가트 상위 스테이지가 우주 비행장에 납품되었습니다. 또한 Soyuz-2.1b 발사체의 건설도 계속되고 있습니다.
설계 및 건설 단계에서 Luna-25 프로젝트는 여러 가지 어려움에 반복적으로 직면했습니다. 이로 인해 장치 구성이 변경되고 출시 날짜가 수정되었습니다. 현재 임무 시작은 2022년 XNUMX월-XNUMX월 발사 기간으로 예정되어 있으며 이러한 계획은 대부분 실현될 것입니다.
출시 문제
처음에는 소유즈-2 운반 로켓을 사용하여 "Luna-Glob"으로 명명된 AMS의 첫 번째 버전을 발사할 계획이었습니다. 이 버전의 임무는 몇 년 동안 진행되었으며 할당된 모든 작업을 해결할 수 있었습니다. 그러나 2011-12 프로젝트의 근본적인 수정. 미디어 교체로 이어졌습니다. Soyuz-2는 업데이트된 요구 사항을 완전히 준수하지 않았고 대신 Zenit-2 제품을 사용하기로 결정했습니다.
프로젝트의 추가 개발은 새로운 변화로 이어졌습니다. 2.1분의 XNUMX 중반에 Soyuz-XNUMXb 발사체와 Fregat 상위 단계의 사용을 제공하는 임무의 최종 버전이 승인되었습니다. 이러한 유형의 제품은 생산 및 운영에서 마스터되며 필요한 모든 특성을 보여주고 지정된 작업에 대처할 수 있습니다.
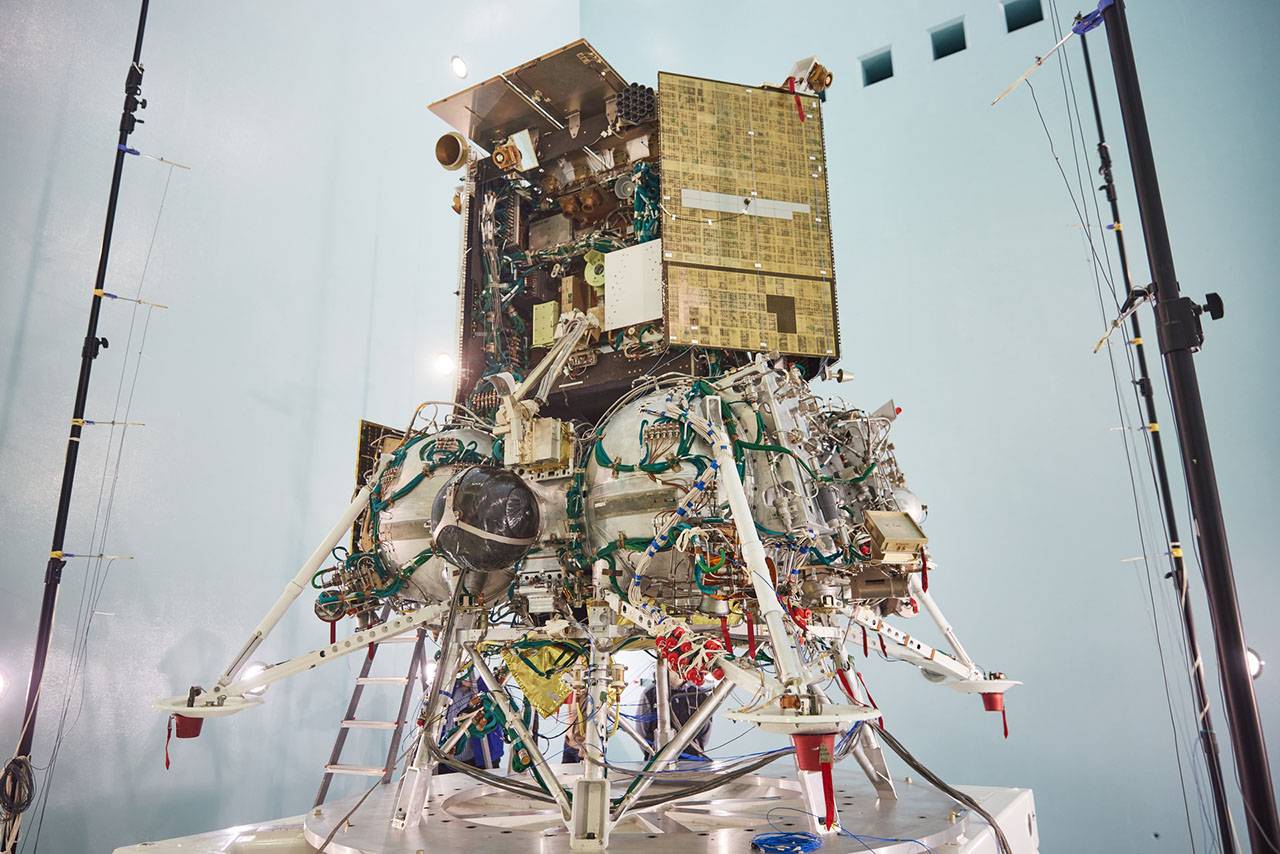
음향 테스트를 위해 조립된 AMC, 2021년 XNUMX월
비행 계획에 따르면 Soyuz-2.1b 로켓은 주어진 고도까지 하중을 높이고 그 후 Fregat은 Luna-25를 지구 위성의 비행 경로로 가져올 것입니다. AMC는 자체 추진 시스템을 사용하여 독립적으로 비행 및 기동의 추가 단계를 수행합니다. 발사 날짜와 사용된 궤적에 따라 비행 시간은 5-6일을 넘지 않습니다. 그런 다음 궤도에서 며칠 후에 장치는 달의 극지방 중 하나에 착륙합니다.
역 모습
Luna-25는 달 표면에 연착륙이 가능한 자동 탐사선입니다. 구조적으로 제품은 랜딩기어와 계기실로 구분됩니다. AMS의 총 질량은 1540kg입니다. 과학 장비 무게 - 30kg. 활동 기간은 1년입니다.
착륙 장치는 충격 흡수 지지대, 추진 시스템, 탱크 등이 있는 플랫폼입니다. 이 모듈은 달과 연착륙을 도는 주어진 궤적을 따라 비행을 제공합니다. 그 위에는 태양 전지판과 동위원소 에너지원이 있는 새는 기기 구획, 스테이션 자체의 전자 및 과학 기기가 있습니다.
AMS "Luna-25"에는 자체 탐색 및 제어 장치가 있으며 이를 통해 비행 및 착륙한 다음 과학 기기를 사용할 수 있습니다. 무엇보다도 이러한 복합물에는 Bius-L 관성 항법 장치와 DISD-LR 도플러 속도 및 범위 측정기가 포함됩니다. BUNI 컴플렉스는 과학 장비와 전원 공급 장치 및 제어 시스템의 통합을 제공합니다.

25년 11월 2021일 Vostochny 우주 비행장에서 "Luna-XNUMX"를 위한 상단 "Fregat"
스테이션에는 개발 된 디지털 통신 및 데이터 전송 시스템이 장착되어있어 원정대의 주요 작업 솔루션을 보장합니다. 달의 정점을 넘는 최대 410만km의 범위에서 안정적인 통신을 제공할 것이다. 통신 수단은 최소 128kbps의 속도로 데이터를 수신하고 64kbps의 속도로 전송할 수 있습니다.
과학적 임무
과학 장비의 최종 세트에는 러시아 과학 아카데미의 우주 연구소와 유럽 우주국이 개발한 기기가 포함됩니다. Luna 25 초기에는 다른 단체들도 관심을 보였다. 따라서 스웨덴 우주 물리학 연구소는 2018년까지 이온 및 중성 원자의 XSAN 탐지기를 러시아 AMS에 보낼 계획이었습니다.
Luna-25에는 600개의 기기와 BUNI 제어 시스템이 설치되어 있습니다. ADRON-LR 중성자 및 감마선 검출기는 XNUMXmm 깊이까지의 표토 구성을 연구하는 데 사용됩니다. 토양 샘플은 레이저 분광계 LAZMA-LR로 연구됩니다. 먼지 입자와 그 역학에 대한 연구는 PML 장치에 의해 수행됩니다. 일부 장비의 작동을 보장하기 위해 토양 샘플을 채취할 수 있는 매니퓰레이터 LMK가 개발되었습니다. 적외선 분광계 LIS-TV-RPM이 직접 설치됩니다.
달 외권은 스웨덴 XSAN 대신 ARIES-L 장치로 조사할 예정이다. 주변 지역을 모니터링하기 위해 스테이션은 25대의 파노라마 카메라, 표면을 촬영하기 위한 XNUMX대의 카메라 및 LMK 조작기를 제어하기 위한 XNUMX대의 입체 카메라가 있는 STS-L 텔레비전 시스템을 받았습니다. 착륙하기 전에 Luna-XNUMX는 낮은 달 궤도에서 IKI RAS와 ESA가 개발한 Pilot-D 광학 복합체를 사용합니다. 그것의 도움으로 유망한 착륙 기술이 해결 될 것입니다.
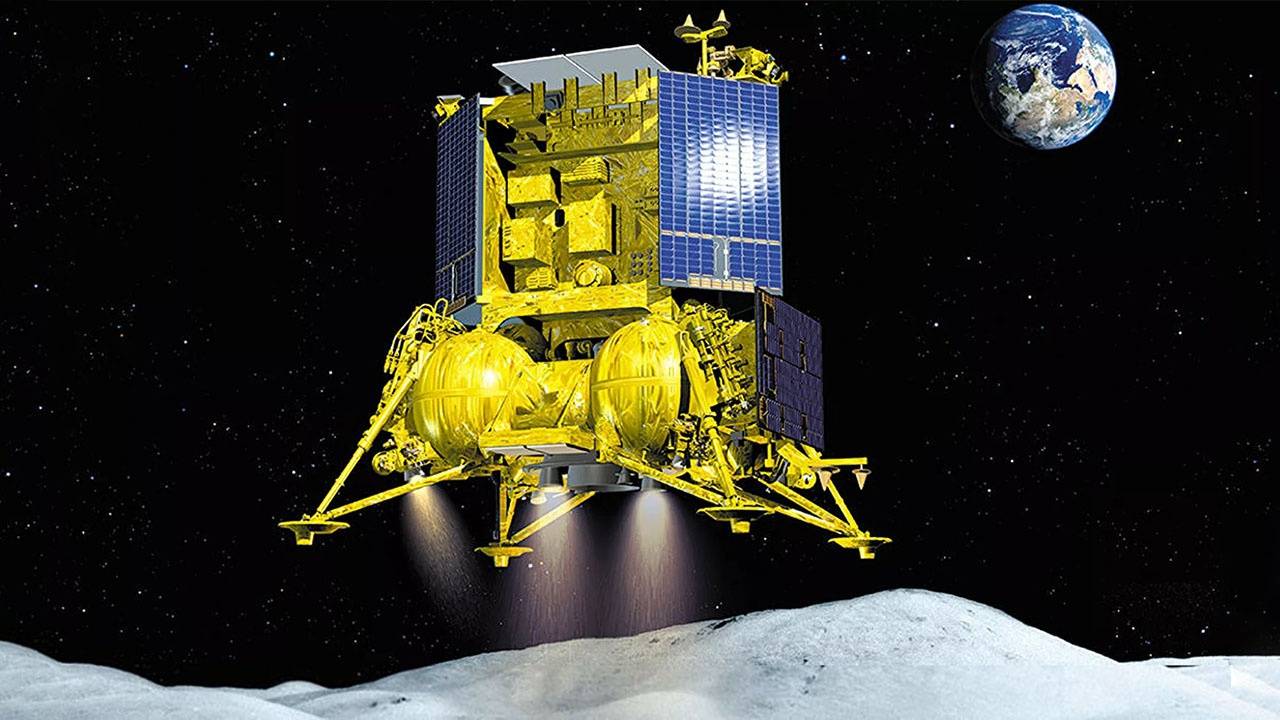
달에 정거장 착륙 - 지금까지 예술가의 관점에서
작동 연도 동안 "Luna-25"는 지구의 자연 위성의 외기권과 토양에 대한 포괄적 인 연구를 수행 할 시간이 있습니다. 이 경우 표토 연구에 주된 관심을 기울입니다. 이것은 달과 태양계의 형성에 대한 기존 지식을 보완할 것입니다. 또한 기존 가설이 확인되면 향후 탐사를 위한 과학적 기반이 마련된다. 인간의 참여로. 달의 토양에서 물, 산소 및 수소 연료까지 추출할 수 있을 것으로 예상됩니다.
카운트 다운
다양한 요인과 상황으로 인해 Luna-Glob / Luna-25 프로젝트의 개발 및 구현이 심각하게 지연되었습니다. 임무의 첫 번째 버전 작업 시작과 예상 발사는 15년 이상 차이가 납니다. 그럼에도 불구하고 지금까지 개발자들은 모든 어려움에 대처했으며 프로젝트는 마지막 준비 단계로 이동하고 있습니다.
최근 발표된 계획에 따르면, 내년 봄 Luna-25는 최종 점검을 위해 Vostochny 우주 비행장으로 이동하여 상부 스테이지에 도킹하고 발사체에 장착할 예정입니다. 동시에 메인 및 리저브 출시 날짜가 결정됩니다. 다양한 추정에 따르면 시작은 출시 기간이 끝날 무렵에 지정됩니다. 따라서 첫 번째 과학 데이터는 여름이 끝나기 전에 지구로 갈 것입니다.
따라서 복잡하고 긴 프로젝트가 진행됩니다. 모든 어려움에도 불구하고 Roscosmos와 러시아 과학 아카데미의 조직은 할당 된 작업에 대처했으며 몇 달 안에 새로운 탐험이 시작될 것입니다. 이것은 지난 수십 년 동안 최초의 국내 달 착륙 임무가 될 것이라는 점을 상기해야 하며, 이러한 이유만으로도 특히 중요합니다.
정보