우주선 "Buran"의 제어 시스템

발사대의 Energia-Buran 시스템. NPO Molniya의 사진
15년 1988월 XNUMX일, 소련의 재사용 가능한 우주선 부란(Buran)의 최초이자 유일한 궤도 비행이 이루어졌습니다. Energia 발사체의 도움으로 우주선은 궤도에 진입하여 두 개의 궤도를 만들고 비행장에서 수평 착륙을 수행 한 후 지구로 돌아 왔습니다. 비행은 고유한 온보드 컨트롤을 사용하여 완전 자동으로 이루어졌습니다.
어려운 작업
재사용 가능한 유망한 로켓 및 우주 운송 시스템의 개발은 1976년에 시작되어 Buran이 등장했습니다. General Designer G.E.가 이끄는 특별히 만들어진 NPO Molniya. Lozino-Lozinsky. 수십 개의 다른 과학 및 디자인 조직도 프로젝트에 참여했습니다. 예를 들어 화학 자동화 설계국(Voronezh)과 기계 공학 연구소(Nizhnyaya Salda)는 추진 시스템 개발을 담당했습니다.
프로그램 참가자는 미래 선박의 최적 이미지를 형성하고 본격적인 프로젝트 형태로 구현해야 했습니다. 동시에 다양한 종류의 많은 기술적 문제를 해결해야 했습니다. 따라서 위임 사항에 따라 미래의 Buran은 유인으로 만들어야했지만 다양한 기능을 갖춘 자동 조종 장치를 사용할 계획이었습니다. 배에는 자동 비행, 하강 및 착륙 모드가 있어야했습니다.

첫 비행 후 "부란". NPO Molniya의 사진
일반적으로 제어 시스템의 개발은 몇 가지 주요 영역으로 나뉩니다. 첫 번째는 대기권을 비행하도록 설계된 글라이더용 방향타 및 관련 시스템의 개발과 관련이 있습니다. 두 번째 작업은 우주 작업을 위한 복잡한 션트 엔진을 만드는 것이었습니다. 세 번째 방향의 틀 내에서 온보드 전자 장치, 컴퓨팅 도구 및 소프트웨어가 개발되었습니다. 이 자금은 다른 제어 시스템의 작동에 대한 제어를 제공하기로 되어 있었습니다.
모든 시스템의 설계는 002년대 전반기에 완료되었습니다. 이것은 대기에서의 후속 테스트를 위해 BTS-XNUMX 아날로그 항공기 제작을 시작할 수 있게 했습니다. 또한 본격적인 우주선 건설이 시작되었습니다.
공기 역학적 제어
"Buran"은 앞쪽 가장자리의 가변 스윕이있는 낮은 델타 날개가있는 "tailless"방식에 따라 제작되었습니다. 동체의 꼬리 부분에 용골이 있었습니다. 이러한 공기 역학적 형태로 궤도 항공기는 정기적인 착륙에 필요한 대기권에서 활공 비행을 할 수 있습니다.
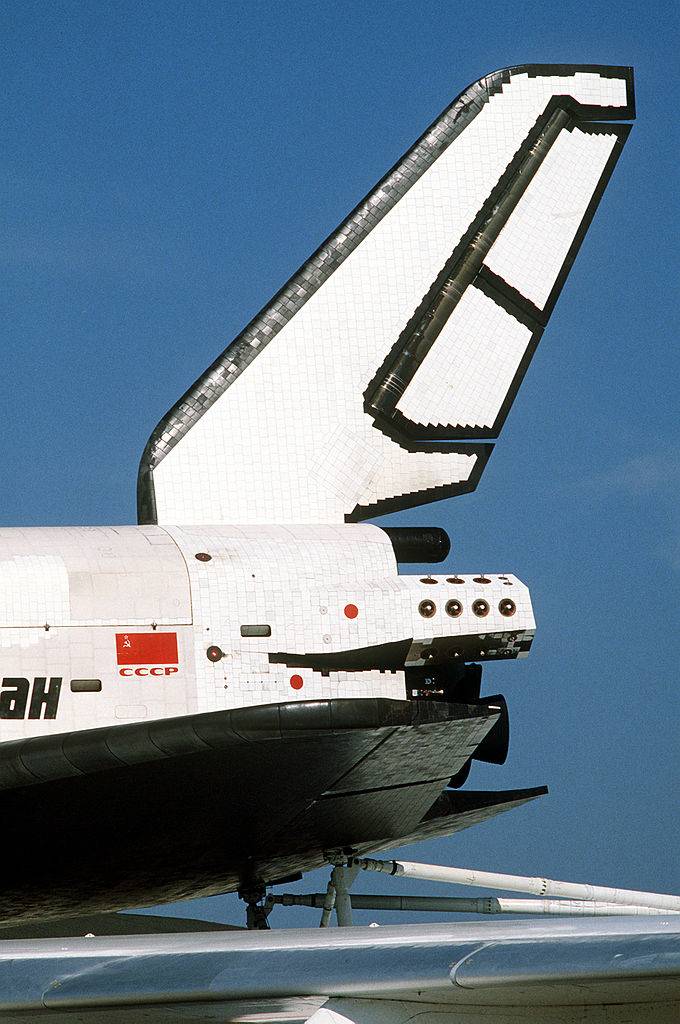
"부란"의 꼬리. 방향타가 있는 용골, 제어 및 방향 엔진 블록, 엘레본 및 밸런싱 쉴드가 명확하게 보입니다. Wikimedia Commons의 사진
착륙을 제어하기 위해 "Buran"은 상당히 간단하고 친숙한 수단을 받았습니다. 넓은 면적의 엘레본은 날개의 뒤쪽 가장자리에 배치되었습니다. 동기식 또는 차동 편향으로 인해 롤과 피치를 제어할 수 있었습니다. elevons 사이, 아래에서 동체 꼬리에 소위를 배치했습니다. 밸런싱 쉴드. 그것의 도움으로 초음속 및 극초음속의 제어성이 향상되었습니다. 용골에는 방향타가 있었다. 그것은 측면으로 분기되어 에어 브레이크의 작업을 수행할 수 있는 두 개의 대칭 수직 부품으로 구성되었습니다.
모든 스티어링 표면은 유압식으로 구동되었습니다. 신뢰성을 향상시키기 위해 Buran은 자체 펌프, 파이프라인 등이 있는 XNUMX개의 독립적인 유압 시스템을 받았습니다. 방향타를 구동하는 유압 액추에이터는 주 제어 시스템의 전기 신호에 의해 원격으로 제어되었습니다.
공간 제어
작업, 기동 및 궤도 방향을 위해 Buran은 소위를 받았습니다. 통합 추진 시스템(APU). 그것은 꼬리에 각각 90kN의 추력을 가진 두 개의 서스테인 엔진을 포함했습니다. 배는 또한 38개의 제어 엔진과 8개의 정밀 방향 엔진을 받았습니다. 이 유닛은 상단과 측면에 노즐이 있는 전방 동체와 XNUMX개의 특징적인 테일 슈라우드에 배치되었습니다.
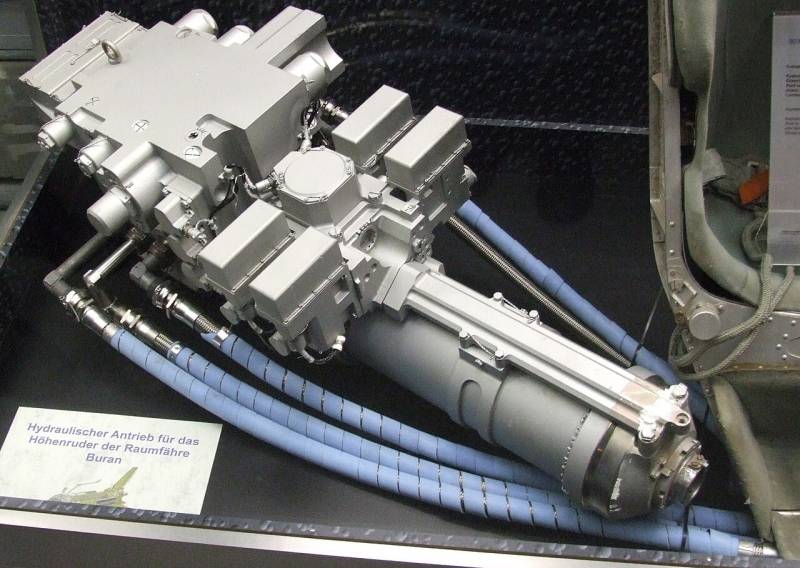
공기 역학적 방향타 중 하나의 유압 드라이브. Wikimedia Commons의 사진
궤도의 주요 작업은 17D15 유형의 제어 엔진에 할당되었습니다. 그들은 기체의 다른 부분에 위치하고 다른 방향으로 향했습니다. 필요한 시간 동안 특정 엔진을 켜면 승무원이나 자동 조종 장치가 배의 방향을 변경해야 했습니다. 또한 제어 엔진은 행진 엔진을 복제할 수 있지만 성능이 저하됩니다.
제품 17D15는 탄화수소 연료와 산소로 구동되는 기체-액체 로켓 엔진이었습니다. 이러한 제품 중 하나의 추력은 최대 4-290초의 특정 충격으로 295kN에 도달했습니다. 비행 중에는 엔진이 최대 2회 켜질 수 있습니다. 총 자원은 26 포함입니다.
오리엔테이션 엔진은 제어 엔진과 디자인이 비슷했지만 더 작은 크기와 기타 특성이 달랐습니다. 추력은 200초의 비충격으로 265N에 불과했습니다. 동시에 비행 당 5 개의 포함이 허용되었습니다. 더 낮은 추력으로 인해 특정 작업을 수행하기에 충분한 공간에서 선박의 더 정확한 방향이 제공되었습니다.
ODE의 제어는 적절한 도구를 사용하여 중앙에서 수행되었습니다. 설치 작업은 수행된 활동 및 작업에 따라 승무원 및/또는 자동화에 의해 제어되었습니다.

승무원 시뮬레이터 조종석. Wikimedia Commons의 사진
컴퓨팅 컴플렉스
모든 모드에서의 비행과 보조 작업의 솔루션, 과학 또는 실제 활동의 구현 등을 보장하는 가장 복잡한 제어 시스템이 Buran을 위해 만들어졌습니다. 여기에는 1250개 이상의 다양한 장치와 장치, 디지털 컴퓨팅 도구, 수많은 케이블 경로 등이 포함되었습니다. 제어 시스템의 다양한 장치는 거의 모든 선박 기체에 배포되었습니다.
제어 시스템의 기본은 온보드 중앙 컴퓨터 컴플렉스(OCCC)였으며 중앙 및 주변 장치의 두 시스템으로 나뉩니다. 이러한 각 시스템은 두 대의 BISER-4 컴퓨터를 기반으로 구축되었습니다. 온보드 디지털 컴퓨터의 이러한 아키텍처는 복합 단지 전체의 높은 신뢰성과 내결함성을 보장합니다. NPTsAP 그들에 의해 개발된 제품 BISER-4. Academician Pilyugin은 CPU 성능이 32x37인 10비트 머신이었습니다.4 연산/초 소비 전력 - 270W, 무게 - 34kg.
BTsVK는 다양한 센서, 도구 및 시스템에서 데이터를 수집하고 처리했습니다. 그는 우주 및 대기 항법을 담당하고 구성 요소 및 어셈블리의 상태를 제어하고 단지의 지상 시설과 데이터를 교환하는 등의 작업을 수행했습니다. 컴플렉스는 또한 공기 역학적 방향타와 ODU의 작동을 제어했습니다. 수동 비행 제어 모드에서 BTsVK는 승무원의 행동을 액추에이터에 대한 명령으로 변환해야 했습니다. 완전히 독립적인 작업을 위해 제공되는 자동 모드.
BTsVK의 경우 운영 체제 및 추가 프로그램 세트 형태로 원본 소프트웨어가 생성되었습니다. 그 당시 소프트웨어의 총량은 미결 상태였습니다. 100MB.
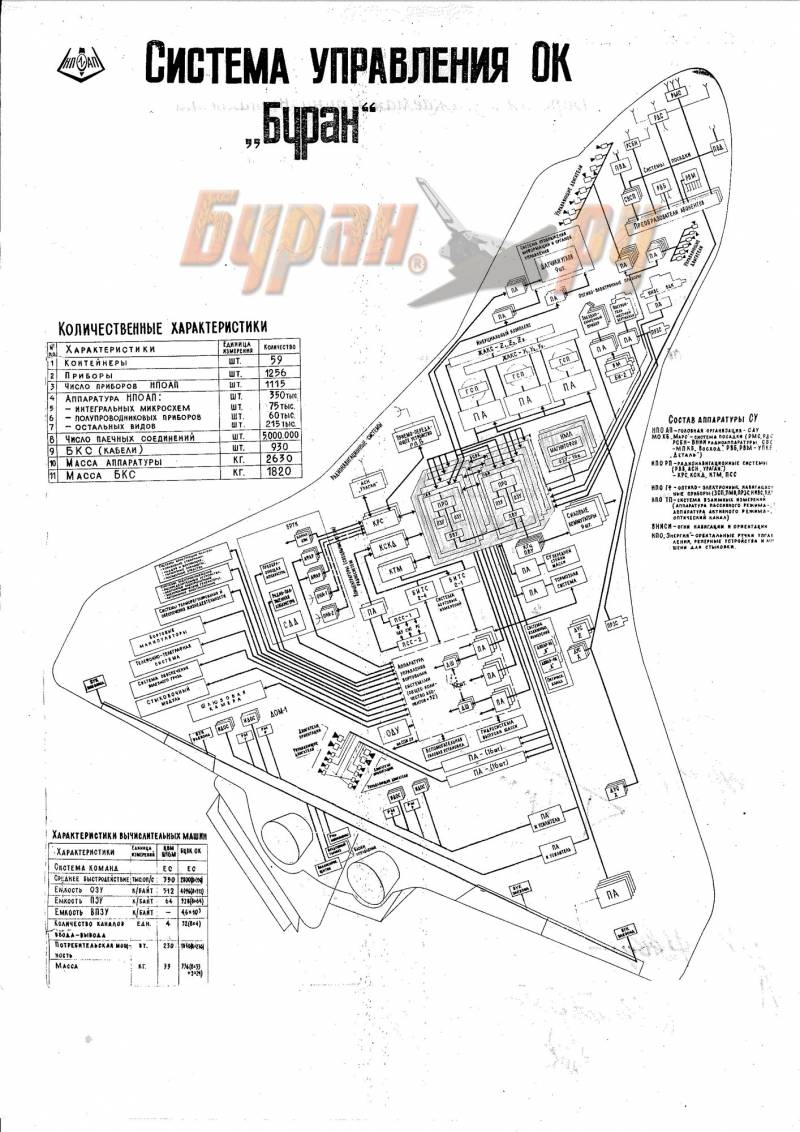
제어 시스템의 개략도. 그래픽 Buran.ru
소프트웨어 콤플렉스는 하드웨어 작동, 온보드 디지털 컴퓨터와 다양한 장치의 상호 작용 등을 보장했습니다. 무엇보다도 모든 모드에서 자동 비행 제어 알고리즘을 구현했습니다. 특히 흥미로운 것은 궤도에서 자동 하강, 대기권 비행 및 주어진 비행장에 착륙하는 가능성입니다. 원래 자동 착륙 모드만 제공되는 것이 신기하다. 나중에 고객의 요구에 따라 설명서가 추가되었습니다.
실습으로 입증됨
1984년 NPO Molniya는 Buran 프로젝트의 다른 참여자들의 도움을 받아 OK-GLI 또는 "002"로도 알려진 아날로그 항공기 BTS-0.02를 제작했습니다. 그것은 대기권에서 수평 이착륙과 비행을 위해 개조된 궤도 항공기의 복제품이었습니다. BTS-02는 Buran의 디자인을 거의 완전히 반복했으며 필요한 모든 컨트롤, 컴퓨터 시스템 등을 갖추고 있었습니다. 동시에 터보 제트 엔진이 장착되었습니다.
10년 1985월 002일 우주비행사 Igor Volk와 Rimantas Stankevičius는 처음으로 BTS-1985를 공중에 띄웠습니다. 이듬해 16 월 네 번째 비행에서 반자동 계획이 처음 테스트되었습니다. 조종사는 항공기 제어를 유지했지만 일부 작업은 자동화로 이전되었습니다. 1987이 끝날 무렵 비행장으로의 자동 비행 실험이 수행되었습니다. 수동 제어는 터치하기 전에만 켜졌습니다. 마침내 002년 1988월 XNUMX일, XNUMX번째 비행에서 BTS-XNUMX는 처음으로 자력으로 착륙했습니다. XNUMX년 봄까지 시스템과 알고리즘을 테스트하기 위해 XNUMX개 이상의 유사한 비행이 완료되었습니다.

Buran용으로 제작된 자이로스코프 관성 항법 장치 Sh300(전경). Wikimedia Commons의 사진
마침내 15년 1988월 XNUMX일, 궤도 부란의 최초이자 유일한 우주 비행이 이루어졌습니다. 행성 주위를 두 번 공전한 후 배는 자동으로 하강하여 Baikonur 비행장에 착륙했습니다. 착륙 단계에서 BTsVK는 지상 시설로부터 비행장의 기상 조건에 대한 데이터를 수신하고 이를 올바르게 평가하고 예상치 못한 기동을 수행했습니다. "Buran"은 독립적으로 최적의 접근 방식을 구축하고 바람에 대한 착륙을 수행했습니다.
과거의 기술
불행히도 Buran의 첫 우주 비행은 유일한 우주 비행이었습니다. 앞으로는 여러 가지 이유로 대부분 객관적이라고 할 수 없으며 Energia-Buran 프로그램이 축소되었고 더 많은 작업이 재개되지 않았습니다. 우주선의 궤도, 대기 및 기타 샘플은 영구 주차에 갔고 일부는 운이 좋게도 박물관 전시회가되었습니다.
그러나 이러한 결과에도 불구하고 대담하고 유망한 Buran 프로그램은 그 잠재력을 보여주었습니다. 소비에트 산업계는 그러한 장비를 개발하고 최소한 테스트할 수 있는 능력을 보여주었습니다. 가용하고 새로 개발된 기술과 구성 요소를 사용하여 우리 기업은 고유한 기능을 갖춘 우주 시스템을 만들 수 있었습니다.
그러나 미래에는 Buran 프로젝트의 경험이 포함됩니다. 제어 시스템의 맥락에서 전체적으로는 소유권이 주장되지 않았습니다. Energia-Buran이 처음 출시된 후 처음 몇 년 또는 수십 년 동안 업계는 이 방향을 완전히 개발할 기회가 없었습니다. 그런 다음 새로운 기술과 훨씬 더 큰 잠재력을 가진 고급 요소 기반이 나타났습니다.
정보