초기 소비에트 우주선 제어 시스템의 진화

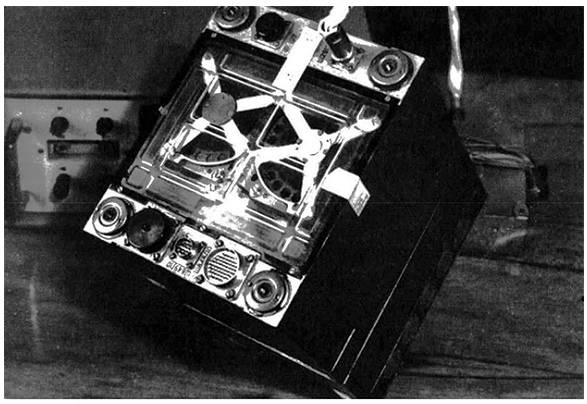
내부 장치를 시연하는 "Sputnik-1" 모델. 우주 박물관 사진
고성능 컴퓨터를 기반으로 구축된 복잡한 제어 시스템 없이는 일회용 또는 재사용 가능, 국내 또는 해외의 현대 우주선을 상상하기 어렵습니다. 그러나 항상 그런 것은 아닙니다. 소련이 설계한 초기 우주선에는 제어 시스템이 전혀 없었습니다. 그런 다음 최초의 간단한 장치가 장치에 나타 났으며 더 발전하여 본격적인 다기능 컴퓨터가 등장했습니다.
미리 정해진 길을 따라
로켓 및 우주 기술 분야의 초기 실험 및 연구에 사용된 국내외 프로브 및 장치에는 본격적인 제어 시스템이 없었습니다. 기내에는 개별 장치 및 시스템에 대한 자동화 장치가 있었지만 본격적인 비행 제어 가능성은 제공되지 않았습니다. 더욱이 그 당시에는 그것들이 필요하지 않았습니다.
예를 들어, 1년 1월에 발사된 최초의 인공 지구 위성 SP-1957(Sputnik-XNUMX)에는 배터리 팩, 무선 송신기, 일련의 센서 및 냉각 장비가 내장되어 있었습니다. 비행 제어뿐만 아니라 공간에서 좌표와 위치를 결정하는 장치가 없었습니다. 인공위성은 발사될 때 결정된 궤적을 따라 움직여야 했다.

"스푸트니크-2"의 모델. 소문자에는 개를위한 장소가있는 "오두막"이있었습니다. Wikimedia Commons의 사진
다음 Sputnik-2는 유사한 원리에 따라 제작되었으며 그 페이로드는 개 Laika가있는 컨테이너였습니다. 기내에는 동물의 상태에 대한 데이터를 수집하고 전송하기 위한 도구만 있었습니다. 그러나 거주 가능한 컨테이너의 냉각과 같은 일부 프로세스의 자동화도 예상되었습니다.
원격 제어
예비 연구 단계에서도 유망한 우주 기술에는 일정한 제어 수단이 있어야 한다는 것이 분명해졌습니다. 독립적으로 또는 지구의 명령에 따라 위성은 기기를 켜고 연구를 수행해야 합니다. 이러한 설계 문제는 다음 우주선을 만들 때 1958년 초에 이미 해결되었습니다.
1958년 3월 스푸트니크 12호 또는 물체 D가 궤도에 진입했습니다. 국내에서 처음으로 자동 및 원격 제어 수단을 받았습니다. 온보드 계측 컴플렉스는 지상 제어 스테이션에서 명령을 수신하고 실행할 수 있습니다. 선상에는 다양한 목적을 위한 XNUMX개의 과학 기기가 있었는데, 명령이나 선상 시간 프로그램 장치에 의해 켜고 끌 수 있었습니다. 또한 지구와 연결되지 않은 궤도의 특정 부분에서는 자기 테이프에 원격 측정 기록이 자동으로 켜집니다. 연결이 복구된 후 기록된 정보가 전송되었습니다.
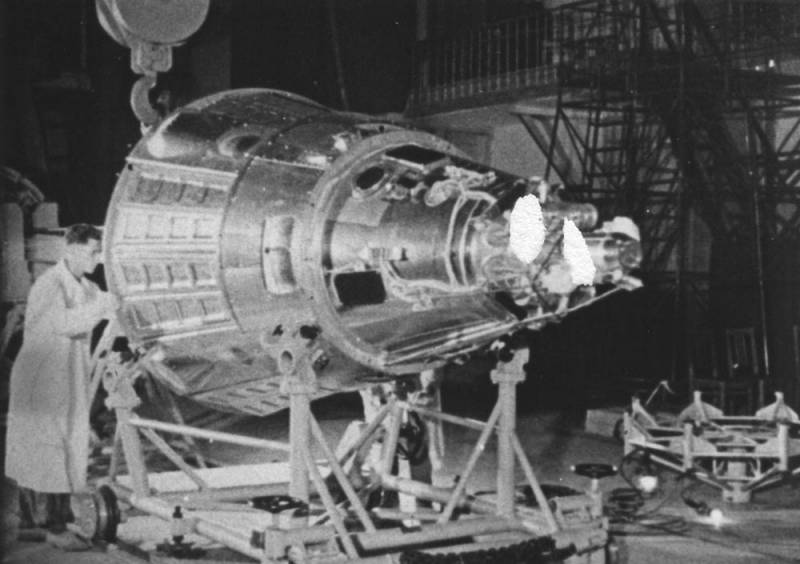
조립 단계에서 "Sputnik-3"/ "D". 사진: RGANTD
곧 무선 명령 원격 제어가 행성 간 연구 분야에서 사용되었습니다. 1958년 가을부터 소련은 달에 자동 행성 간 스테이션을 보내려는 여러 시도를 했습니다. 첫 번째 발사는 사고로 끝났고 1959년 1월에야 Luna-2 AMS는 지구의 자연 위성 가까이를 지나갈 수 있었습니다. 같은 해 XNUMX 월, Luna-XNUMX 우주선은 구조가 파괴되면서 처음으로 달에 착륙했습니다.
초기 Luna 제품에는 명령을 수신하고 원격 측정을 전송하기 위한 무선국뿐만 아니라 다양한 목적을 위한 일련의 측정 장비, 작동을 모니터링하는 장치가 있었습니다. 달로의 비행을 위해 소위 스테이션이 설치되었습니다. 블록 "E" - 원격 제어가 가능한 캐리어 로켓 "Vostok-L"의 세 번째 단계. 부대는 AMS를 계산된 궤적으로 가져오는 일을 담당했습니다.
발사 후 Luna와 함께 Vostok-L 로켓의 비행은 원래 탄도 미사일 테스트를 위해 만들어진 레이더 장비에 의해 지상에서 추적되었습니다. 궤적 데이터는 BESM-2 기계를 기반으로 하는 특수 컴퓨터 시스템에서 수신 및 처리되었습니다. "Moon"이있는 제품 "E"가 최적의 궤적에서 벗어 났을 때 복합체는 궤적을 수정하라는 명령을 형성하고 전송했습니다. 일반적으로 이러한 시스템은 오류가 있었지만 잘 수행되었습니다.
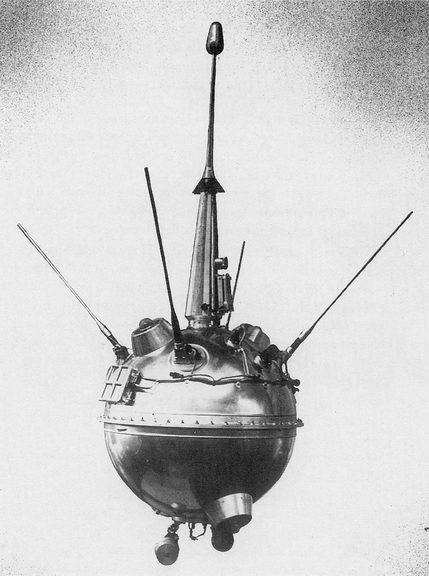
자동 스테이션 "Luna-2". Wikimedia Commons의 사진
새로운 기능
초기 우주선은 미리 계산된 궤적을 따라서만 비행할 수 있었고, 발사체나 상단 단계에 의해 발사되었습니다. 우주 프로그램의 추가 개발을 위해 장치가 우주에서 방향을 잡고 기동을 수행할 수 있도록 하는 몇 가지 제어 도구를 개발해야 했습니다.
이 방향에서 첫 번째 성공은 3년 1959월에 성공적으로 출시된 Luna-XNUMX AMS의 개발 중에 이루어졌습니다. 이 스테이션을 위해 원래의 Chaika 광 원격 측정 방향 시스템이 만들어졌습니다. 여기에는 AMS, 컴퓨팅 장치 및 분로 엔진을 기준으로 태양과 달의 위치를 결정하는 광학 요소가 포함되었습니다. 이전과 마찬가지로 스테이션의 과학 장비는 설정된 프로그램 또는 제어 센터의 명령에 따라 작동했습니다.
"Luna-3"가 지구의 자연 위성을 촬영할 수 있게 한 것은 "Chaika" 시스템의 존재였습니다. 그것의 뒷면. 앞으로 이 시스템의 개발과 주요 아이디어는 다른 우주 기술 프로젝트에 적극적으로 사용되었습니다.
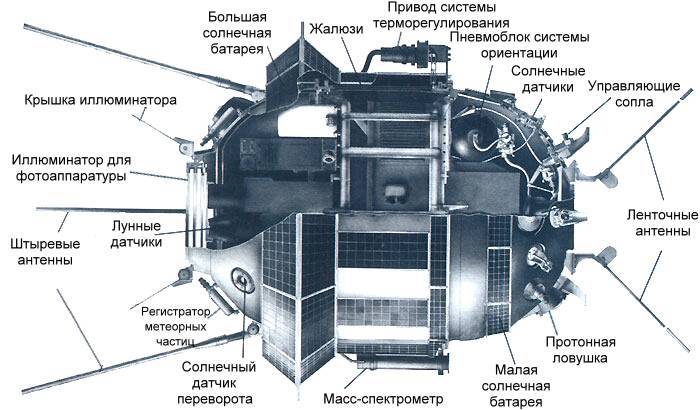
오리엔테이션 시스템 "Seagull"을 사용하는 "Luna-3". 그래픽 Astronaut.ru
자율 제어
1957년부터 유망한 유인 우주선인 보스톡(Vostok)의 개발이 진행되었습니다. 그는 서로 복제되는 자동 및 수동 제어 시스템을 받았습니다. 모든 수단은 특정 단순성으로 구별되며 작업 세트에 해당합니다. 그래서 장비는 궤도에서 오리엔테이션을 수행하고 하강을 수행할 수 있게 했습니다. 다른 기능은 거의 없었습니다. 우주 방향을 위해 우주선에는 자동화 또는 우주 비행사가 제어하는 저전력 엔진 세트가 있습니다.
적외선 센서를 사용하여 수평 정렬을 수행했습니다. 궤도 축을 따라 배는 Vzor 장치(수동)를 사용하여 태양(자동) 또는 지구에 의해 안내되었습니다. 독립적으로 또는 명령에 따라 자동화는 제동 추진 시스템을 사용하여 궤도에서 하강할 수 있습니다. 우주 비행사는 대략적인 착륙 영역을 계산하는 Globus 내비게이션 장치의 도움으로 이러한 작업을 수행하도록 요청 받았습니다.
1960년 4월, 무인 구성의 실험용 Vostok이 처음으로 발사되었습니다. "Sputnik-19"라는 이름의 장치는 오리엔테이션 시스템의 오류로 인해 지구로 돌아갈 수 없습니다. 그런 다음 몇 번 더 출시되었습니다. 과학 장비, 동물 및 더미 형태의 페이로드가 있습니다. 예를 들어, 1960년 XNUMX월 XNUMX일에 유명한 Belka와 Strelka가 우주로 나갔습니다. 명백한 이유로 이러한 비행은 자동 및 원격 제어만 사용했습니다.

유인 우주선 "Vostok"의 계기판. Wikimedia Commons의 사진
마침내 12년 1961월 XNUMX일 유인 구성으로 보스톡의 첫 비행이 이루어졌습니다. 세계 최초의 우주 비행사 Yu.A. 가가린의 우주선은 한 궤도를 돌고 성공적으로 지구로 돌아왔습니다. 향후 XNUMX년 동안 우주 비행사와 함께 Vostok 우주선을 XNUMX번 더 발사하고 많은 무인 테스트를 수행했습니다. 이러한 모든 활동을 통해 새로운 제어 시스템의 작동 가능성이 확인되었습니다.
온보드 컴퓨터
이미 Luna 또는 Vostok 우주선을 개발하는 동안 소련 전문가들은 우주선 및 AMS용 제어 시스템을 개발하기 위한 추가 방법을 연구하고 있었습니다. 그래서 1년대 후반에 우주선을 화성에 보내는 주제에 대한 연구가 시작되었습니다. 처음에는 XNUMXM 프로그램의 틀 내에서 작업이 수행되었습니다.
그러한 프로그램에서 무선 명령 제어의 사용은 사실상 배제되었습니다. 이전 프로젝트와 마찬가지로 별도의 자동화 도구에도 단점이 있었습니다. 이와 관련하여 소위를 만들기로 결정했습니다. 온보드 중앙 컴퓨터를 기반으로 하는 계산 장치로 다른 모든 AMS 시스템이 연결됩니다. 또한 SRB를 만드는 작업은 새로운 솔루션과 최신 구성 요소 기반의 도입으로 성공적으로 해결되었습니다. 사실 비행 중 모든 작업을 수행하는 단일 온보드 컴퓨터에 관한 것입니다.
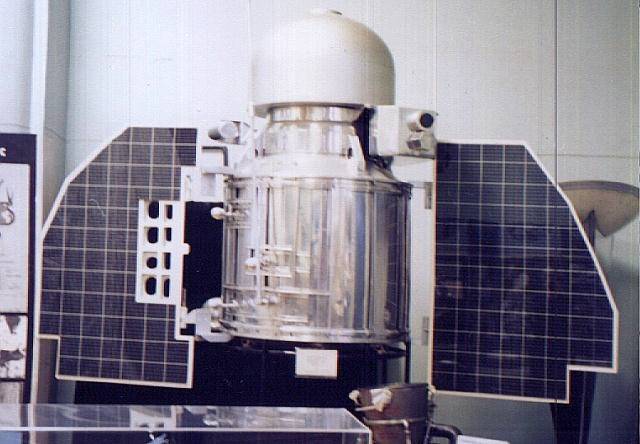
본격적인 온보드 컴퓨터가 장착 된 AMS "Mars-1960". Wikimedia Commons의 사진
1M 프로그램의 일환으로 1960개의 Mars-1960 스테이션이 건설되었습니다. 그들은 자동으로 화성 근처를 비행하고 과학적 데이터를 수집하여 지구로 전송해야 했습니다. 두 AMS의 발사는 XNUMX년 XNUMX월에 이루어졌으며 두 발사 모두 사고로 끝났습니다. 비행 중에 SRB를 테스트하는 것은 불가능했습니다.
그러나 SRB 아이디어에 대한 발전은 사라지지 않았습니다. 곧 "무거운 행성 간 선박"TMK의 개발이 시작되었으며 단일 컴퓨터 단지를 장착하기로 결정했습니다. 이 프로젝트는 성공하지 못했지만 개발자는 우주용 컴퓨터 제작에서 다시 한 번 전진했습니다.
마지막으로 TMK 작업의 일환으로 모든 작업을 담당하고 승무원을 돕는 단일 온보드 컴퓨터의 개념이 마침내 형성되고 해결되었습니다. 곧 이 개념은 소유즈 유인 우주선, 살류트 궤도 정거장 및 기타 여러 프로젝트를 만드는 데 사용되었습니다.
소유즈 우주선의 초기 온보드 컴퓨터 블록 중 하나. 사진 habr.com
진화 과정
XNUMX년대와 XNUMX년대에는 로켓과 우주권의 개발이 빠른 속도로 진행되었습니다. 우주 비행의 추가 발전을 결정한 주요 사건은 부러울 정도로 규칙적으로 발생했으며 종종 몇 달 간격으로 분리되었습니다. 동시에 다양한 분야의 많은 기업과 전문가가 업계에 고용되어 문제를 신속하게 해결하는 데 기여했습니다.
이러한 추세는 우주선과 선박용 제어 시스템의 진화에서 잘 설명됩니다. 그래서 1957년에 스푸트니크 1호는 아무런 제어 수단 없이 궤도에 진입했고, 이미 1960년에는 다기능 온보드 컴퓨터를 탑재한 AMS가 제작되어 발사되었습니다. 동시에 우주 비행에서 여전히 사용되는 주요 아이디어와 개념이 형성되었지만 이미 현대 기술 수준에 있습니다.
정보