ACTUV - 무인 로봇 사냥 잠수함 탐지

ACTUV는 적의 잠수함을 탐지하고 추적하도록 설계된 무인 시스템의 현대 미국 프로젝트입니다. 이 선박의 개발은 국방 과학 기관인 DARPA의 명령에 따른다. ACTUV (Anti-submarine warfare Continuous Trail Unmanned Vessel)는 적의 잠수함 탐지에 능동 반향 위치 측정 기능을 사용합니다. 법원 데이터는 어떤 정보도받을 수 없다고 가정합니다. оружия 지능 업무 만 해결할 것이지만이 개념은 미래에 변화를 겪을 수 있습니다.
ACTUV 생성 프로그램은 4단계로 구성됩니다. 2012년 1월 2단계 프로그램 완료 발표(이 단계에서 실행 타당성 결정 및 기타 평가 활동 수행). 3단계와 36단계의 예비 작업 일정은 약 4개월이며, 18차 최종 단계에는 XNUMX개월이 더 할당됩니다. 따라서 실험 샘플의 개발, 구축 및 실증 단계에 대해 이야기하고 있습니다. 로봇-보트.
현재 ACTUV 장치의 특성 중 일부는 이미 알려져있다.
- 6 000 km 이상의 순항 범위;
- 기지로부터 3 000 km의 거리에서 작동하는 능력;
- 80 일 주문의 배터리 수명.
- 적의 잠수함을 탐지하기 위해, 활성국 GAR을 사용할 계획이다;
- 하나의 로봇 보트 비용은 20 백만 달러 수준입니다.
- 주문 15 년의 서비스 수명.
ACTUV 프로젝트에 대한 새로운 세부 사항 및 세부 정보는 SAIC (Science Applications International Corporation)에서 게시 한 비디오 덕택에 사용 가능해졌습니다. 미 국방부의 새로운 프로젝트는 인간의 개입없이 적의 잠수함을 완전 자동 모드로 탐지하고 모니터 할 수있는 로봇 선박의 개발을 목표로하고있다. 이 프로그램의 개발의 주된 이유는 많은 개발 도상국 정부들뿐만 아니라 다소간의 대형 마약 카르텔을 감당할 수있는 상대적으로 저렴한 디젤 - 전기 잠수함의 증가로 인한 위협이었습니다.
잠수함들은 2 타입의 배들이 있다고 말합니다 : 이것들은 잠수함과 표적입니다. 현대의 잠수함은 인류가 전쟁을하기 위해 만든 방대한 무기고 중 가장 파괴적이고 비밀스런 전투 유닛 중 하나이기 때문에이 말은 진실과 아주 가깝습니다. 미 국방부는 해군의 해수면 통치 시대를 끝내기를 진지하게 생각하며 로봇 사냥꾼 인 ACTUV를 요구하고있는 것으로 보인다. 방위청은이 프로젝트에 이미 58 백만 달러를 할당했다.
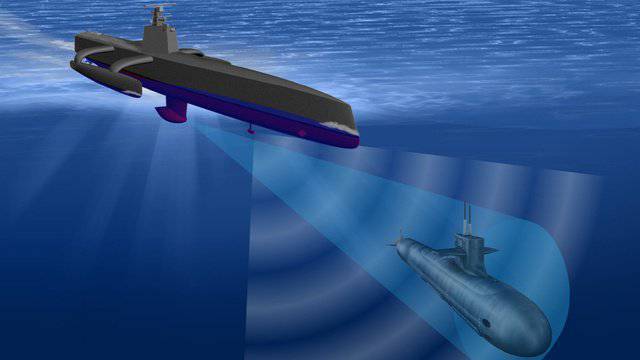
완전 자율 모드 인이 로봇 사냥꾼은 60-90 일 동안 적 잠수함을 검색 할 수 있다고 가정합니다. 이 함선은 미 해군의 제어 시스템에 완전히 통합 될 예정입니다. 특히, 그것은 잠수함 목표를 목표로해야합니다 항공헬리콥터와 항공기에서 떨어진 소나 부표와 함께 작동합니다. ACTUV의 주요 작업 도구는 소나입니다.

적의 잠수함을 탐지 한 경우 로봇 사냥꾼이 접근하여 가장 가까운 군함에 위치 정보를 전송합니다. 이 경우, 무인 우주선은 순찰 구역을 벗어날 때까지 또는 파괴 될 때까지 잠수함을 따라갈 수있다. 로봇 사냥꾼이 동시에 숨길 필요조차 없다는 사실에 주목할 가치가있다. 그는 소나의보다 효과적인 방사 모드를 사용하여 개방 된 상태에서 바다를 조사하는 데 종사 할 수있다. 물론 적의 잠수함은 로봇을 파괴 할 수 있지만, 동시에 전략 핵 미사일로 잠수함에 대한 주요 전투 임무를 해결하지 않고도 그 자체를 발견하게 될 것입니다. 이는 받아 들일 수없는 일입니다.
이와는 별도로 군대에서 사용되는 많은 수의 무인 차량과 달리 선박 사냥꾼 인 ACTUV에는 무기가 없다는 점에 유의해야합니다. 함선의 주요 임무는 적의 잠수함을 검색, 추적 및 호위하는 것입니다. 적극적인 조치가 필요한 경우 미 해군의 다른 선박 및 항공기가 사업에 진입해야합니다. 헌터 배는 완전히 독립적으로 작동 할 수 있으며, 바쁜 항구 항구에서 배가 바다를 떠날 때 조종사가 조종 할 수 있어야합니다.
자율 주행 모드에서의 선박 항법은 다양한 온보드 센서 시스템과 인공 지능 시스템의 조합을 통해 실현됩니다. 이 센서 중 장거리 및 단거리 레이더, 전기 광학 센서, 레이저 스캐너 LIDAR (조명 탐지 및 범위 설정) 및 기타 장비가 있다고 가정합니다. ACTUV가 적의 잠수함의 의도 된 위치에 가까워지면 ACTUV는 액티브 "백라이트"시스템을 갖춘 한 쌍의 고주파 수중 음파 탐지기를 사용하여 작동 범위와 정확도를 높입니다. 잠수함에 대한 추가 정보는 특히 민감한 센서 - 자력계로 제공해야합니다. 수집 된 모든 데이터를 기반으로 무인 사냥꾼선은 잠수함의 이미지를 만들고 유형을 결정하고 잠수함을 식별하며 특정 국가에 속하는지를 결정할 수 있습니다.
수집 된 모든 데이터는 인공 지능을 기반으로 시스템에 의해 처리됩니다 (획득 된 데이터의 수에 대한 적의 가장 가까운 의도조차도 계산할 수 있다고 가정합니다). 예를 들어, 잠수함을 탐지에서 회피하는 상당히 일반적인 전술 중 하나가 해면에있는 일반 선박 아래에 숨어 있습니다. 이러한 회피 기동을 알면, 로봇 선박 사냥꾼은 주어진 수역에서 통제 된 방향으로 움직이는 선박에 더 많은주의를 기울일 수 있습니다. 당연히 인공 지능 시스템이 완벽하지는 않습니다. 숙련 된 잠수함은 어떤 경우에도 추위에 사냥터를 떠날 수 있지만,이 경우 ACTUV는 가능한 시스템 오류를 독자적으로 수정할 수 있고 올바른 탐색 경로로 배를 인도 할 수있는 조작원의 통제하에 올 수 있습니다.
ACTUV 우주선의 첫 번째 프로토 타입은 상당히 광범위한 해상 테스트 프로그램을 거치며 몇 년 후에 만 가능합니다. 그러나 DRAPA가 이러한 작업을 성공적으로 수행하고 논리적 인 목표를 달성 할 수있는 경우 새로운 ACTUV 사냥꾼 배송은 게임의 규칙을 변경하고 공해에서 잠수함을 상쇄 할 수있는 요인이 될 수 있습니다.
정보 출처 :
-http : //www.arms-expo.ru/049057052048124051048050049053.html
-http : //www.dailytechinfo.org/military/4394-opublikovany-podrobnosti-proekta-sozdaniya-sudov-robotov-ohotnikov-za-podvodnymi-lodkami.html
-http : //blog.kp.ru/users/4052155/post256725165/
정보