거대한 로봇의 도약

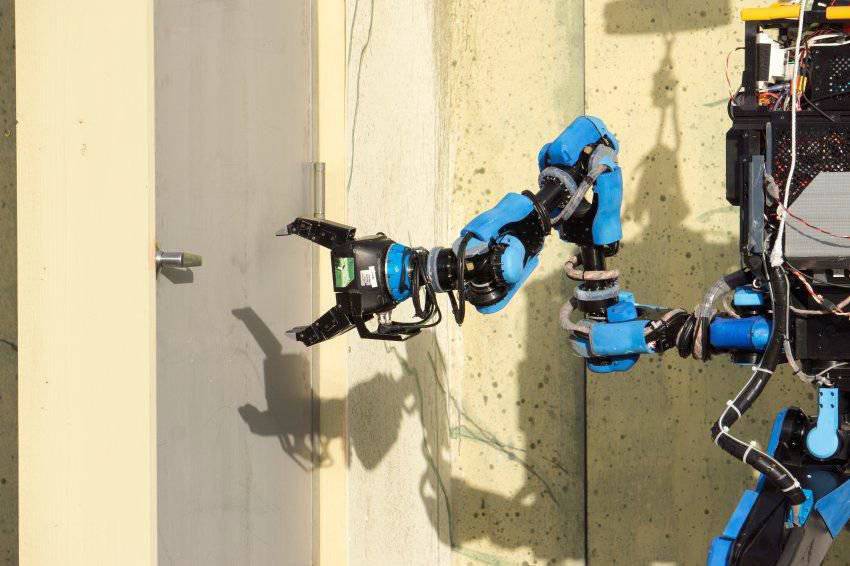
CHIMP는 가장 어려운 작업 중 하나를 수행합니다. 소화전을 소화전에 연결하려고합니다.
대회 로봇 국방고등연구계획국(DARPA)이 운영하는 로보틱스 챌린지는 시스템이 할 수 있는 것과 시스템이 설계되는 방식을 혁신할 것을 약속합니다. 이 이벤트를 살펴보고 여러 주요 플레이어의 의견을 평가해 봅시다.
11 March 일본의 2011는 혼슈 섬의 동해안에서 약 70 km 떨어진 진원지를 가진 강력한 지진이었습니다. 9 포인트의 힘을 지진으로 인해 40 미터의 높이에 도달하고 10 km로 내륙으로 퍼지는 파도가 형성되었습니다.
후쿠시마 1 원자력 발전소는 파괴적인 쓰나미의 길에 섰다. 거대한 파도의 영향으로 원자로가 격렬하게 파괴되었다. 이 사건은 1986의 체르노빌 사고 이후 최악의 핵 비극이었습니다. 이 이벤트는 현재 로봇의 가장 중요한 프로그램 중 하나 인 DRC (DARPA Robotics Challenge - 미 국방부 첨단 연구 개발국 프로그램의 로봇 시스템 실습 테스트) 시나리오의 기초를 형성했습니다.
4 월 2012에서 DRC 테스트가 발표되었으며 테스트 시나리오로 재난 구조가 선정되었습니다. 새로운 시스템의 개발은 10 1 월에 백악관과 국방 장관이 확인한 미 국방부의 2012 핵심 사명의 일부 였기 때문에이 시나리오에서 필요했습니다. 12 월,이 대회의 일환으로 올해의 2013는 플로리다에서 최초의 본격적인 테스트가 시작되었을 때 중요한 단계를 넘어 섰습니다.
DRC는 몇 가지 혁신적인 측면으로 구별되며 가상 테스트와 현장 테스트가 결합되어 자금 지원 및 비축 임 팀에 개방적입니다. 이 이벤트는 4 개의 소위 섹션 또는 트랙으로 구성됩니다. DARPA는 트랙 A와 트랙 B 두 트랙에 대한 재정 지원을 제공하고 모든 신규 도착자를 위해이 대회를 열었습니다.
4 개의 트랙 중 2 개 (트랙 A와 트랙 B)에 자금이 지원되었습니다. DARPA는 대회에 대한 일반적인 발표와 문서 제출 후, 새로운 하드웨어 및 소프트웨어 개발을 담당하는 7 개 팀을 Track A로 선정했습니다. 트랙 B에서 11 팀은 소프트웨어 만 개발했습니다.
트랙 C는 자금 지원을받지 않으며 전 세계의 신입 사원들에게 열려 있습니다. 트랙 트랙의 참가자로서, 참가자들에게 먼저 로봇의 가상 시뮬레이션 프로그램을 사용하여 소프트웨어를 테스트했습니다. 트랙 D는 하드웨어 및 소프트웨어 개발을 원하는 외국인 참가자를 대상으로하지만 어떤 단계에서든 DARPA 자금을 지원하지 않습니다.
혁신적인 DRC 접근 방식의 핵심은 VRC 구성 요소 (Virtual Robotics Challenge - 로봇 시스템의 가상 테스트)였습니다. 트랙 B 또는 C에서 온 팀이든 DARPA로부터 자금을 수령하고 Boston Dynamics에서 Atlas 로봇을 사용하여 현장 테스트에 참여할 것입니다.
5 월에 트랙 B와 트랙 C의 팀이 다음 달에 개최 된 VRC 자격을 얻기 위해 신청했습니다. 등록 된 2013 팀 중 100만이 VRC에 계속 참여했으며 전체 26 팀이 본격적인 테스트에 접근했습니다.
VRC는 Apache 2 Open Source Foundation에서 허가 한 고정밀 가상 공간에서 열렸습니다. 팀은 첫 번째 현장 테스트에서 실제 로봇에 대해 확인 된 8 가지 작업 중 3 가지 작업을 완료했습니다.
테스트
VRC에서 시연 된 로봇의 성능은 인상적 이었지만 현장 테스트에서 행동하는 방식에는 100 % 확실성이 없었습니다. 그러나 DRC 프로그램 디렉터 질 프랫 (Jill Pratt)은 자신의 능력에 매우 만족한다고 말했습니다. "우리는 테스트의 첫 번째 물리적 부분 이었기 때문에 많은 하드웨어 오류를 볼 수 있다고 생각했지만, 실제로 그렇지 않았습니다. 모든 하드웨어는 매우 안정적이었습니다. 처음 몇 팀, 특히 처음 3 팀은 의도적으로 커뮤니케이션 채널에 개입 했음에도 불구하고 점수의 절반 이상을 얻었으며 상당한 발전을 이루었습니다. "
Pratt는 Atlas 로봇의 역량에 깊은 인상을 받았습니다. "그는 우리의 기대치를 실제로 뛰어 넘었습니다 ... 보스턴 다이나믹스는 어떤 팀도 하드웨어 고장으로 어려움을 겪지 않도록 훌륭한 업무를 수행했습니다."
그러나 여전히 개선의 여지가 있습니다. 로봇의 유압 시스템에서 작업 공간이 제한적이고 새는 로봇 팔입니다. 현대화 과정은 12 월 2013 행사 이전부터 시작되었습니다. Pratt는 결승전에서 다른 악기의 수를 늘리고 싶다고 말하면서 로봇은 대본에서 올바른 악기를 선택하고 바꿀 필요가있는 악기를 가진 벨트를 가질 가능성이 높습니다.
아틀라스 로봇은 플로리다의 Human Cognitive Abilities and Machines 연구소의 연구원이자 소프트웨어 엔지니어 인 Doug Steven에 의해 칭찬을 받았습니다. Track B의 팀은 필드 테스트에서 2 위를 차지했습니다. "이것은 꽤 멋진 로봇입니다 ... 우리는 2 ~ 3 개월 동안 순수 시간 200 시간을했습니다. 이것은 실험 플랫폼에서 매우 드문 것입니다. 착실하게 작동하고 중단되지 않는 능력입니다."
DRC에있는 로봇의 인상적인 기능은 말 그대로 영웅적인 노력입니다. 작업은 특히 어렵고 팀에서 개발 한 하드웨어 및 소프트웨어 부분을 테스트하도록 설계되었습니다.
업무가 어렵더라도 Pratt는 DARPA가 술집을 너무 많이 과장 한 것으로 생각하지 않고 각 작업이 팀 중 적어도 하나에 의해 완료되었다고 지적했습니다. 가장 어려운 작업은 호스를 운전하고 연결하는 것이 었습니다. 스티븐에 따르면 첫 번째는 가장 어려웠다. "나는 분명히 말하고 싶다. 자동차를 운전하는 것이지 운전 자체가 아니기 때문이다. 매우 어려운 자율 주행을 원한다면 항상 로봇 운영자가 있어야합니다. 운전은 그렇게 어렵지는 않았지만 차에서 내리는 것은 사람들이 상상할 수있는 것보다 훨씬 어려웠습니다. 그것은 큰 입체 퍼즐을 해결하는 것과 같습니다. "
12 월 2014에서 통과해야하는 DRC 결승전의 형식에 따라 모든 작업이 하나의 연속 시나리오로 결합됩니다. 이 모든 것들을보다 신뢰성있게 만들고 그것을 수행하는 방법에 대해 팀에게 전략적 선택권을주기 위해. 어려움도 커질 것이며 프랫은 "홈 스턴트에서 잘 해낸 팀에 대한 우리의 임무는 더 어렵게 만드는 것입니다. 우리는 첨부 된 케이블을 제거하고 통신 케이블을 제거하고 무선 채널로 교체하는 한편 통신 품질을 저하시켜 이전 테스트보다 악화시킬 것입니다. "
"현재 나의 계획은 연결을 간헐적으로 만드는 것입니다. 때로는 완전히 사라져야 할 것입니다. 그리고 저는 이것이 실제 재해에서 일어나는 것과 같이 무작위 순서로 이루어져야한다고 생각합니다. 우리는 몇 초 안에 로봇이 할 수있는 일을 보게 될 것입니다. 심지어는 운영자의 통제에서 완전히 벗어나지 않더라도 매우 흥미로운 스펙타클이 될 것입니다.
Pratt는 안전 시스템도 결승에서 제거 될 것이라고 말했다. "이것은 로봇이 가을을 견뎌야한다는 것을 의미하며, 그것은 스스로 상승해야한다는 것을 의미합니다. 실제로 이것은 매우 어려울 것입니다."

샤프트 로봇은 파편을 경로에서 제거합니다.
도전과 전략
테스트 중 8 개 팀 중 5 개 팀이 ATLAS 로봇을 사용했지만 Track A - Team Schaft 수상자와 Team Tartan Rescue 3 차 수상자의 참가자가 디자인을 사용했습니다. Tartan Rescue는 카네기 멜론 대학 (Carnegie Mellon University, CMU)의 로보틱스 엔지니어링 센터 (National Engineering Center)에서 DRC 테스트를 위해이 팀이 CMU 고도로 지능형 모바일 플랫폼 (CHIMP)을 개발했습니다. Tartan Rescue의 Tony Stentz는 "이미 준비된 휴머노이드 로봇을 사용하는 것이 더 안전 할 수 있지만 재난에 대응할 수있는 더 나은 설계를 만들 수 있음을 이해했습니다."라고 자신의 시스템을 개발할 수있는 근거를 설명했습니다.
"우리는 대략 인간의 형태를 만들어야한다는 것을 알았지 만 휴머노이드 로봇의 균형을 유지할 필요가 없다는 것을 알고있었습니다. 두발 달린 로봇이 움직이면 평형을 유지할 필요가 없으며 평평한 표면에서는 힘들지 만, 움직일 수있는 물건을 공격하거나 건설 잔해를 통과하는 것에 관해 이야기 할 때 더욱 어려워집니다. 그러므로 CHIMP는 정적으로 안정되어 있고, 상당히 넓은 바닥에 놓여 있고 수직 위치에 다리의 한 쌍의 유충을 굴려서 앞뒤로 움직여 제자리로 돌아갈 수 있습니다. 작업에 필요한 모든 것을 휴대 할 수 있도록 손을 드러내 기 쉽습니다. 그는 더 어려운 지형으로 이동할 필요가있을 때 프로펠러를 추적하기 때문에 사지를 모두 떨어 뜨릴 수 있습니다. "
다른 트랙의 팀이 테스트 준비에있어 다른 문제에 직면하게 된 것은 필연적 인 일입니다. 인간인지 능력 연구소와 기계는 소프트웨어 개발에 중점을 두었습니다. 이는 VRC에서 전체 작업으로의 전환이라는 가장 어려운 문제이기 때문입니다. Stephen은 "Atlas 로봇이 우리에게 인도되었을 때 사용할 수있는 두 가지"모드 "가있었습니다. 첫 번째는 보스톤 다이나믹스에서 제공하는 간단한 운동 세트로 운동에 사용할 수 있으며 약간 결함이 있습니다. 대부분의 팀이 Homestead에서 개최 된 경쟁에서 보스톤 다이나믹스의 내장 모드를 사용했으며 거의 모든 팀이 자체 로봇 제어 소프트웨어를 작성했지만 전체 로봇에 대해 자체 소프트웨어를 작성한 사람은 아무도 없었습니다 ... "
"우리는 처음부터 우리 자신의 소프트웨어를 작성했으며 전신 컨트롤러였습니다. 즉 모든 작업에서 작동하는 하나의 컨트롤러였습니다. 다른 프로그램이나 다른 컨트롤러로 전환하지 않았습니다 ... 따라서 가장 어려운 작업 중 하나는 프로그램 코드를 작성하는 것이 었습니다 보스톤 다이나믹스가 우리에게 제시했을 때 일종의 블랙 박스 였기 때문에 Atlas에서 실행했습니다. 그러나 로봇과 IP이므로 낮은 수준의 온보드 컴퓨터에 실제로 액세스 할 수 없었습니다. 우리의 소프트웨어는 외부 컴퓨터에서 실행되고 사용 된 것에 묶다 나는 온보드 컴퓨터와 섬유의 API (응용 프로그래밍 인터페이스)를 먹고, 긴 지연 문제는 여기에 동시성 이미 아틀라스»와 같은 복잡한 시스템을 제어하는 것은 매우 어려워 질에있다.
처음부터 자신의 코드를 작성하는 것은 확실히 인간의인지 능력과 기계 연구소에서 더 어렵고 시간이 많이 걸렸지 만 Boston Dynamics에 의존하는 것보다 더 빨리 문제를 해결할 수 있기 때문에이 접근 방식이 더 수익성이 있다고 생각합니다. 또한 동봉 한 아틀라스 소프트웨어는 보스턴 다이나믹스가 자체 데모에서 사용하는 소프트웨어만큼 발전하지 못했습니다. "로봇을 보냈을 때 ... 보스턴 다이나믹스가 비디오를 Youtube에 올렸을 때 보았던 움직임과 똑같지는 않다는 것이 꽤 공개적으로 말했습니다 이 회사의 소프트웨어를 다루는 로봇. 이것은 덜 진보 된 버전입니다 ... 이것은 로봇을 배우기에 충분합니다. 그들이 팀에 사용 코드를 제공 할 것인지, 모두가 자신의 소프트웨어를 작성하지 않을 것이라고 생각합니다. 즉, 처음에는 로봇과 함께 할 수 있었고 실제 DRC 테스트에서 8 가지 작업을 모두 수행하지 않았습니다. "
Tartan Rescue 팀에게있어서 가장 큰 어려움은 새로운 플랫폼과 관련 소프트웨어를 개발할 때 준수해야하는 긴박한 일정이었습니다. "15 개월 전, CHIMP는 종이에 그려진 개념이었습니다. 그래서 우리는 부품을 개발하고, 부품을 만들고, 조립하고, 모든 것을 시험해야했습니다. 우리는 대부분의 시간이 걸릴 것이라는 것을 알고 있었으며, 로봇이 준비 될 때까지 소프트웨어를 작성하지 않고 기다릴 수 없었기 때문에 소프트웨어를 병렬 개발하기 시작했습니다. 우리는 실제로 작업을위한 본격적인 로봇이 없었기 때문에 시뮬레이터와 하드웨어 대체품을 개발에 사용했습니다. 예를 들어, 별도의 팔 조작기가 있었으며 한 사지를 검사 할 때 사용할 수있었습니다. "라고 Stentz는 설명합니다.
데이터 전송 채널의 악화로 인한 어려움에 대해 Stentts는 이러한 결정이 처음부터 이러한 상황을 위해 특별히 만들어진 것이며 매우 어려운 문제는 아니라고 지적했습니다. "우리는 로봇의 머리 부분에 센서를 장착했습니다 - 레이저 범위 파인더 및 카메라 - 로봇을 둘러싼 환경의 전체 3-D 텍스처 맵과 모델을 구축 할 수 있습니다. 이것은 우리가 로봇을 제어하기 위해 운전자 측에서 사용하는 것이며 우리는 사용 가능한 주파수 대역과 통신 채널에 따라 다른 해상도로이 상황을 상상할 수 있습니다. 우리는 우리의주의를 집중하고 일부 지역에서는 더 높은 해상도를 얻고 다른 지역에서는 낮출 수 있습니다. 우리는 로봇을 직접 원격 제어 할 수 있지만, 로봇에 대한 목표를 정의 할 때 더 높은 수준의 제어를 선호하며,이 제어 모드는 신호 손실 및 지연에보다 강합니다. "
샤프트 로봇이 문을 엽니 다. 향후 시스템에는 향상된 로봇 처리 기능이 필요할 것입니다.
다음 단계
Stentz와 Stephen은 DARPA에서 무엇이 될지에 대한 추가 정보를 기억하고 결론을 기대하며 앞으로 나아갈 때 어떤 행동을 취해야하는지 평가하기 위해 현재 팀이 실제 시험에서 자신의 역량을 평가하고 있다고 전했다 결승. Stephen은 또한 Atlas에 대한 수정을 기대하고 있으며, 최종 승인을 위해 이미 승인 된 요구 사항 중 하나 인 온보드 전원 공급 장치 사용에 주목하고 있습니다. CHIMP의 경우 전기 드라이브가있는 로봇이 이미 자체 배터리를 휴대 할 수 있으므로 문제가되지 않습니다.
Stentz와 Stephen은 로봇 시스템 영역을 개발하고 재난 구조 시나리오에서 사용할 수있는 플랫폼 유형을 만들 때 해결해야 할 여러 가지 문제가 있음에 동의했습니다. "나는 만병 통치약이 될 수있는 것은 하나도 없다고 말할 것이다. 하드웨어 측면에서보다 유연한 핸들링 기능을 갖춘 기계가 유용 할 수 있다고 생각합니다. 소프트웨어에 관해서는 로봇이 통신 채널없이 원격 작업을보다 잘 수행 할 수 있도록보다 높은 차원의 자율성이 필요하다고 생각합니다. 그들은 많은 일을 스스로하고 시간 단위로 더 많은 결정을 내리기 때문에 더 빨리 작업을 수행 할 수 있습니다. 나는 좋은 생각한다. 뉴스 DARPA의 후원하에 진행되는 경쟁은 실제로 하드웨어와 소프트웨어의 두 영역을 촉진시키기 위해 고안된 것 "이라고 Stentz는 말했습니다.
Stephen은 기술 개발의 개선이 또한 필요하다고 생각합니다. "프로그래머로서 소프트웨어를 개선 할 수있는 많은 방법을보고 있으며 이러한 컴퓨터에서 작업하는 과정에서 개선 할 수있는 많은 기회를 볼 수 있습니다. 실험실과 대학에서는이 과정의 강력한 문화가없는 곳에서 많은 흥미로운 일들이 일어나기 때문에 때로는 일이 무의미하게 진행됩니다. 또한 DRC 테스트에서 정말 흥미로운 프로젝트를 살펴보면 하드웨어 및 혁신 부문에서 많은 개선 기회가 있음을 알게되었습니다. "
Stephen은 아틀라스가 달성 할 수있는 것의 주된 예인 단기간에 개발 된 실행 가능한 시스템을 지적했습니다.
그러나 Pratt에게있어 문제는보다 명확하게 정의되어 있으며 소프트웨어 개발이 먼저 이루어져야한다고 생각합니다. "내가 전달하려고하는 아이디어는 소프트웨어의 주요 부분이 귀 사이에 있다는 것입니다. 로봇의 두뇌에서 일어나는 일과 두 사람이 서로 어떻게 동의하는지, 나는 두뇌에서 무슨 일이 일어나고 있는지를 의미합니다. 우리는 로봇의 하드웨어에 대해 생각하고 있으며 문제는 여전히 남아 있습니다. 예를 들어 전원 공급의 효율성과 함께 생산 비용에 문제가 있습니다. 의심 할 여지없이 가장 어려운 부분은 소프트웨어입니다. 이는 인식과 상황 인식, 세계에서 일어나는 일에 대한 인식 및 로봇이 인식하는 것을 기반으로 한 선택을 포함하여 로봇과 휴먼 인터페이스에 대한 소프트웨어 코드와 로봇 자체에 대한 작업을 수행하기위한 소프트웨어 코드입니다.
Pratt는 첨단 시스템 개발 및 산업 발전에있어 로봇 용 상업용 응용 프로그램을 찾는 것이 핵심이라고 믿습니다. "나는 우리가 재난과 일반적인 방어 영역을 제거하는 것 외에도 상업적 응용 프로그램이 정말로 필요하다고 생각한다. 진실은 시장, 국방, 신속한 대응 및 재난 구호가 상업 시장에 비해 작다는 것입니다. "
"우리는 DARPA의 관리에 대해 이야기하기를 아주 좋아합니다. 예를 들어 휴대 전화를 예로 들어 봅시다. DARPA는 휴대 전화에 사용 된 기술을 이끌어 낸 많은 개발에 자금을 지원했습니다 ... 휴대 전화 자체가 의도 된 방위 시장 일 경우, 거대한 상업 시장 덕분에 지금보다 훨씬 많은 주문이들 것입니다. 휴대 전화의 놀라운 접근성을 얻을 수있었습니다 ... "
"로봇 분야에서 우리는이 일련의 사건이 정확히 필요하다는 견해를 가지고 있습니다. 우리는 상업 세계가 가격을 떨어 뜨릴 수있는 애플리케이션을 구매할 필요가 있으며, 그 후에 상업 분야의 투자가 투자 될 군사용 시스템을 개발할 수있게 될 것 "이라고 말했다.
첫 번째 팀은 Team Schaft, IHMC Robotics, Tartan Rescue, Team MIT, Robosimian, Team TRAClabs, WRECS 및 Team Trooper와 같은 12 월 2014 재판에 8 팀이 참여합니다. 각자의 의사 결정을 향상시키기 위해 100 만 달러를 받게되며, 대부분의 경우, 돈보다 가치가 있지만 승리 한 팀에게는 2 백만의 상금이 지급됩니다.

NASA의 Robosimian Jet Propulsion Laboratory는 특별한 디자인을 가지고 있습니다.
가상 항목
소프트웨어 개발 팀 만 참여하는 DRC 테스트에 DARPA의 두 트랙을 포함하면 가능한 가장 넓은 범위의 참가자에게 프로그램을 개방하려는 경영진의 희망에 대해 이야기합니다. 이전에는 이러한 기술 개발 프로그램이 방위 산업 회사 및 연구소의 특권이었습니다. 그러나 각 팀이 소프트웨어를 테스트 할 수있는 가상 공간을 만들면 로봇 용 소프트웨어를 개발하지 않았거나 경험이 거의없는 경쟁 업체가이 분야의 유명한 회사와 동일한 수준에서 경쟁 할 수있었습니다. DARPA는 시뮬레이션 된 공간을 DRC 테스트의 장기적인 유산으로 간주합니다.
2012에서 DARPA 당국은 챌린지 경쟁을위한 가상 공간을 개발하기 위해 오픈 소스 소프트웨어 재단에 위임했으며이 조직은 Gazebo 소프트웨어 패키지를 사용하여 개방형 모델을 만들기 시작했습니다. Gazebo는 3 차원 세계에서 로봇, 센서 및 객체를 시뮬레이션 할 수 있으며, 센서에서 실제 데이터를 제공하고 객체간에 "물리적으로 그럴듯한 상호 작용"이라고 설명합니다.
오픈 소스 재단의 브라이언 지요 키 (Brian Gjorki) 회장은 입증 된 기능 덕분에 가제보가 사용되었다고 전했다. "이 패키지는 로봇 공동체에서 널리 사용됩니다. DARPA는 로봇 커뮤니티에서 장점을 보았 기 때문에 DARPA가 그것을 내기를 원했던 이유입니다. 우리는 개발자와 사용자 커뮤니티를 만들 수 있습니다. "
비록 Gazebo가 이미 잘 알려진 시스템 이었지만 Görki는 개선의 여지가 있지만 DARPA가 정의한 요구 사항을 충족시키기위한 조치를 취해야한다고 지적했습니다. "걷는 로봇을 시뮬레이트하는 데는 거의 작업을 수행하지 않았습니다. 주로 바퀴가 달린 플랫폼에 초점을 맞추 었습니다. 걷는 로봇의 시뮬레이션과는 아주 다른 몇 가지 측면이 있습니다. 연락처 해상도를 작성하는 방법과 로봇을 모델링하는 방법을 매우 신중하게 선택해야합니다. 이 방법을 사용하면 정확성과 교환하여 좋은 매개 변수를 얻을 수 있습니다. 로봇의 물리 모델을 세부적으로 모델링하는 데는 많은 노력이 필요했기 때문에 실제 시간의 10 분의 1 또는 100 분의 1에 해당하는 작업과 달리 양질의 모델링을 얻고 작업 로봇을 거의 실시간으로 사용할 수 있습니다. 당신이 그것에 끼워 넣은 노력. "

시뮬레이션 된 Atlas 로봇이 가상 DRC 경쟁 중에 차에 탄다.
고르 키 (Gorky)는 가상 공간에 대한 아틀라스 로봇 시뮬레이션과 관련하여 재단이 기본 데이터 세트로 시작해야한다고 말했다. "보스톤 다이나믹스가 제공 한 모델로 시작하여 컴퓨터 보조 설계의 세부 모델로 시작하지는 않았습니다. 우리는 주어진 간단한기구 모델을 가지고있었습니다. 기본적으로이 다리의 길이, 크기 등이 쓰여진 텍스트 파일입니다. 우리에게는이 모델의 정확하고 정확한 조정이 어렵 기 때문에 정확성과 교환하여 작업 매개 변수가 손상 될 수 있습니다. 단순화 된 방법으로 모델링하면 기본 물리 엔진에서 일부 부정확성을 만들 수 있습니다. 이는 특정 상황에서 불안정하게 만듭니다. 따라서 많은 작업이 모델을 약간 변경하고 시스템의 특정 부분을 시뮬레이트하기 위해 코드를 작성하는 경우가 있습니다. 이것은 단순한 물리 시뮬레이션 일뿐만 아니라 그 아래에서 우리가 떨어지지 않을 수준입니다. "
Pratt는 VRC 및 시뮬레이션 된 공간으로 달성 된 것을 긍정적으로 인식합니다. "우리는 이전에는 없었던 작업을 수행했으며 운영자가 대화식 작업을 수행 할 수 있도록 실시간으로 실행할 수있는 물리적 관점에서 현실적인 기술 모델링을 만들었습니다. 팀을 구성하는 사람과 로봇에 대해 이야기하고 있으므로 로봇의 시뮬레이션은 실시간으로 의미있는 사람과 동일한 시간 프레임에서 작동해야하므로이 작업은 꼭 필요한 작업입니다. 이제는 모델의 정확성과 안정성 사이에서 타협이 필요합니다 ... 저는 가상 경쟁에서 많은 성과를 거뒀다고 믿습니다. "
Stephen은 소프트웨어를 개발할 때 인간인지 능력 연구소와 IHMC 기계가 다양한 문제에 직면했다고 설명했습니다. "우리는 가상 경쟁의 일부로 Gazebo와 통합 된 자체 모델링 조건을 사용했지만, 우리의 개발 대부분은 Simulation Construction Set이라는 플랫폼에서 수행되었습니다 ... 우리는 실제 로봇을 실행할 때 소프트웨어를 사용했으며, 모델링과 이것이 우리의 초석 중 하나입니다. 우리는 훌륭한 소프트웨어 개발 경험에 많은 측면에서 의존합니다. "
Stephen은 IHMC에서 Java 프로그래밍 언어를 사용하는 것을 선호한다고 말했습니다. "정말 인상적인 툴 컴플렉스가 주위에서 성장했습니다." 그는 Gazebo와 자체 소프트웨어를 결합 할 때 "주요 문제는 Java에서 소프트웨어를 작성하고 로봇 용 소프트웨어의 대부분이 C 또는 C ++ 언어를 사용한다는 점입니다. 이는 임베디드 시스템에 매우 유용합니다. 그러나 우리는 원하는 방식으로 Java로 작업하고 싶습니다. 코드가 C 또는 C ++로 구현 되었기 때문에 특정 시간대에 코드를 작동 시키지만 아무도 우리를 제외하고는 사용하지 않습니다. 이것은 모든 Gazebo 프로그램이 Java 코드로 작업 할 때 큰 문제입니다. "
DARPA와 오픈 소스 재단은 모델링과 가상 공간을 지속적으로 개발하고 개선합니다. "우리는 시뮬레이터를 응급 구조대 외부의 다른 상황에서보다 유용하게 만드는 요소를 도입하기 시작했습니다. 예를 들어 경쟁에서 사용 된 소프트웨어 ( "클라우드"컴퓨팅 환경에서 시뮬레이션을 수행하기 때문에 CloudSim이라고 불림)를 클라우드 서버에서 사용하려는 의도로 개발합니다 "라고 Gerky는 말합니다.
클라우드 환경에서 일반적인 사용을 위해 시뮬레이션 된 환경을 열고 클라우드 환경에서 작업 할 때의 주요 이점 중 하나는 서버에서보다 강력한 시스템으로 높은 수준의 계산을 수행 할 수 있기 때문에 사람들이 경량의 컴퓨터와 심지어는 넷북 및 태블릿을 사용할 수있게한다는 것입니다. 직장에서 일하기. Gerkie는 또한이 접근법이 제품 설계 및 개발뿐만 아니라 교육에도 매우 유용하다고 믿습니다. "세계 어느 곳에서든이 시뮬레이션 환경에 액세스하여 새 로봇을 사용해 볼 수 있습니다."
사용 된 재료 :
www.janes.com
www.darpa.mil
www.bostondynamics.com
정보