지상 로봇. 드롭 시스템에서 무인 호송 (5의 일부)

이전 단락의 마지막 몇 줄은 무거운 땅을 사용하는 영역으로 원활하게 이동했습니다. 로봇순전히 물류 작업을 넘어선 것입니다. 이 비옥하고 흥미롭고 방대한 주제를 적어도 부분적으로 더 공개하려고 노력할 것입니다.
G-Nius : 물론 Elbit Systems와 Israel Aerospace Industries의 합작사 인 G-Nius는 무거운 순찰과 무장 로봇에서 가장 실용적인 경험을 가지고 있습니다. 첫 번째 로봇 장치 인 Guardium은 나중에 Guardium Mk.1으로 이름이 바뀌 었으며 2007 년에 서비스를 시작했습니다. Mk.1 변형은 Tomcar 오프로드 섀시를 기반으로했으며 Mk.2 버전은 논리적으로 동일한 출처의 섀시를 기반으로했지만화물 수송 작업에 매우 적합한 400 kg 용량을 갖추고있었습니다. 그 다음 포드 F-3 픽업에 기반을 둔 Mk.350 버전이 왔습니다. 원래 Guardium은 Tel Aviv의 Ben Gurion Airport에 의해 순찰 중이며, 이스라엘 군대는 G-Nius에서 여러 로봇을 인수했습니다.

G-Nius의 Guardium Mk1은 텔 아비브의 벤 구리온 공항 경계선을 따라 몇 년 동안 서비스를 제공해 왔습니다.

G-Nius의 Guardian Mk2에는 400 kg의 물품을 포장 할 수있는화물 플랫폼이 있습니다.

G-Nius 로봇 라인의 최신 옵션 인 Hybrid Multipurpose Vehicle (HMV)은 Eurosatory 2014

Dumurs 태그 (Tactical Amphibious Ground Support) 전술 앰프를 기반으로하는 G-Nius의 AvantGuard Mk 1; Elbit Systems의 DBMS 사진에서 볼 수있다.
Dumur Tags 차량 (전술 수륙 양면 지상 지원)을 기반으로하는 AvantGuard의 전투 사용에 더 중점을 둡니다. HP 1,75 파워를 갖춘 쿠보 타 (Kubota) 터보 디젤 엔진이 장착 된 4 트랙 100 톤 섀시. 20 km / h의 최대 속도를 발달시킨다. 0,91 미터 길이와 0,42 미터 너비가있는 각각 4 개의 트랙은 낮은지면 압력과 최적의 이동성을 제공합니다. 1 톤의 톤 용량으로 원격 제어 전투 모듈 (SDM)을 포함하여 다양한 유형의 모듈을 설치할 수 있습니다. Mk2 버전이 M113 BTR을 기반으로 개발 된 후,이 로봇은 AvantGuard Mk.1에서 지정을 받았습니다.
일반적으로 지난 7 년 동안 G-Nius 로봇은 60 000 시간 이상으로 업무를 수행하여이 시스템 운영 업체의 귀중한 정보를 회사에 제공했습니다. Eurosatory 2014에서 선보이는 최신 플랫폼은 각면에 2 개의 파워 플랜트가있는 4x4 섀시를 기반으로합니다. 그것은 당신이 잡종 단위를 얻을 수있는 디젤 엔진 및 전기 엔진 일 수있다; 따라서 최신 제품에 G-Nius가 제공 한 Hybrid Multipurpose Vehicle (HMV)이라는 이름이 붙었습니다. 이 프로토 타입에는 Elast Systems의 마스트 광전자 스테이션과 전투 모듈이 장착되었습니다. 첫 번째 G-Nius 로봇에는 특수 시스템이 장착되었지만 현재 이스라엘 회사는 플랫폼에 의존하지 않는 추가 세트를 개발했으며 해당 섹션에서 설명합니다.
Qinetiq : 특수 작전 부대의 지휘 및 자체 자금의 상당한 투자 등 다양한 방위 조직과의 계약 덕분에 Quinetiq는 첨단 모듈 식 무장 로봇 시스템 인 Maars (Modular Advanced Armed Robotic System)를 개발했으며 정찰 로봇의 무장 버전입니다. 전기 모터에 의해 구동되는 추적 플랫폼, 7 km / h까지 가속하고 165 kg의 무게.


Quinetiq의 무장 한 Maars 로봇
실제로, 이것은 7,62 발의 탄약과 쿼드 240mm M450 유탄 발사기가 장착 된 40mm M203B 기관총으로 무장 한 소형 전투 차량입니다. 설치의 트렁크는 개별적으로 선택되며 치명적인 수류탄, 예를 들어 고 폭발성, 폭발성 파편화 이중 사용 또는 공기 분사와 같이 치명적이지 않은 탄약, 예를 들어 고무 총알, 산탄 총, 최루 가스, 연기, 저소음 및 수류탄을 발사 할 수 있습니다. 힘의 증가는 치명적이지 않은 옵션, 예를 들어 120dB 사이렌을 가진 양면 메가폰을 통해 전송되는 음성 메시지와 잠재적 위협을 경고하거나 눈부신 녹색 레이저의 경고 장치로 시작할 수 있습니다. 타워는 360 ° / s의 각속도로 155 ° 회전 할 수 있으며 수직 포인팅 각도는 -20 ° / + 60 °입니다. 360 ° 12도보기는 회전식 지원 장치의 광학 전자 스테이션에 의해 제공되며 여기에는 x75의 디지털 줌이있는 주간 카메라와 320 °의 시야가있는 열 화상 카메라와 x240의 디지털 줌이 있고 시야각이 2 ° 인 36xXNUMX 해상도의 열 화상 카메라가 포함됩니다. 이 매개 변수는 사령관의 파노라마 잠망경의 특성과 같습니다. 탱크; 기관총과 동축으로 장착 된“화살표”광경은 광학 줌 x26 및 디지털 줌 x12가 장착 된 주간 카메라와 640 ° FoV의 시야각을 가진 480x47 해상도의 열 화상 카메라 및 야간 또는 열악한 조건에서 조준 할 수있는 디지털 줌 x4입니다. 레이저 거리 측정기는 목표물까지의 거리를 측정하여이를 화재 제어 시스템 (LMS)으로 전송합니다.
샷 정의 시스템은 LMS에 목표 데이터를 제공하기 위해 추가 될 수 있습니다. "조종사"는 95 ° 시야각을 가진 전 / 후 / 주간 / 야간 카메라를 사용합니다. 작업 시간은 수행되는 작업에 따라 3 시간에서 12 시간까지 다양합니다. 통합 슬립 모드를 사용하면 최대 1 주일 동안 배터리 수명을 늘려 배터리 에너지를 절약 할 수 있습니다. Maars는 회사의 대부분의 로봇에 공통적 인 QinetiQ Tactical Robotic Controller 전술 컨트롤러 또는 Toughbook Laptop Controller 랩톱 컴퓨터를 사용하여 제어 할 수 있습니다. 시스템은 항상 운전자가 제어하며, 운전자는 핸드 컨트롤러의 특수 버튼을 사용하여 즉시 전원을 끌 수 있습니다. 현재 5 개의 Maars 부대가 경험에 기반한 기술 전술 방법 설명을 다루는 미국 해병대를 테스트하고 있습니다. 앞으로 QinetiQ는 운영자의 부담을 줄이기 위해 음성 명령 작업을 고려하고 있습니다.
노스 롭 그루먼 (Northrop Grumman) 노스 롭 그루먼 (Northrop Grumman)은 카멜 (Camel) 물류 로봇을 바탕으로 Madss (모바일 무장 해제 지원 시스템 - 이동 무장 보병 지원 시스템)이라는 이름하에 무장 플랫폼을 개발했습니다. 무거운 탑재량으로 인해 플랫폼은 중형 무기 (이 경우에는 전투 모듈에 설치된 7,62-mm 기관총 M240B)를받을 수 있습니다. 40-mm MK-19 자동 유탄 발사기, 대형 기관총 M2, 경 장비총 M249, 작은 반동이있는 25-mm 및 30-mm 건과 같은 대체 무기도 제공됩니다. 치명적이지 않은 시스템도 설치할 수 있습니다 (예 : FN Herstal FN303).

Mobile Armed Dismount Support System 또는 MADSS는 Camel 로봇의 무장 버전입니다. 화재 테스트 중 사진에서

터키의 회사 인 Gate Elektronik은 Robas를 개발했습니다. Robas는 다양한 장애물을 극복하기위한 4 개의 로터리 트랙이 있으며,
게이트 일렉트로 니크 : 무거운 플랫폼 중에서도 터키 회사 인 Gate Elektronik에서 개발 한 Robas 로봇은 다소 특이한 구조를 가지고 있습니다. 4 개의 단축 된 트랙으로 구별되며, 각각은 구동 스프로킷에 연결된 전기 모터에 의해 구동됩니다. 장력 스프로킷은 캐터필러 장력을 높이기 위해 스프링이 장착되어 있습니다. 로봇에서 각 엔진이 무한 궤도를 변경하여 단계를 극복하고 장애물을 극복 할 수 있도록하는 것은 드문 일입니다. 장치 Robas는 장애물 높이 800 mm을 극복 할 수 있습니다.
배터리 세트는 4 시간 동안 자율적 작동을 보장하며 최대 작동 범위는 25 km이며 최대 속도는 10 km / h입니다. 콘솔의 거리는 1 킬로미터입니다. 비어있는 Robas 로봇의 질량은 250 kg이며 운반 용량은 150 kg입니다. 이를 통해 안정화 무기, 광 전자 스테이션, 감시 레이더, 광산 탐지 장비, 소음 장치 등과 같은 다양한 유형의 시스템을 설치할 수 있습니다.


무장 한 로봇 플랫폼 Oto Melara의 TRP2 FOB는 자격 요건에 가깝지만 아프가니스탄에 배치 할 시간을 놓칠 수 있습니다
오토 멜라라 : 소형 TRP3 NEC는 보병 부대를 위해 설계되었지만, Oto Melara TRP2 모델은 이탈리아 군대의 정보 부에서 지능과 정보 수집 능력을 향상시키는보다 무겁고보다 효율적인 시스템으로 만들어졌습니다. 그러나 전방 작전 기지를 지키고있는 병사들의 위험이 매우 높은 아프가니스탄의 상황은이 기지의 경계를 순찰하기위한 무장 로봇을 만드는 과정을 가속화해야했습니다. TRP2 FOB (TRP2 Combat라고도 함)는 휴대용 모듈로 분해 할 수있는 능력과 같은 필수 매개 변수의 대부분을 이미 포함하고있는 기존 플랫폼에서 수정되었습니다. Caterpillars는 브러시리스 전동기를 구동하여 15 km / h의 속도에 도달 할 수 있도록합니다. 리튬 이온 배터리는 4 시간 동안 지속됩니다. GPS / 관성 시스템 외에도 중간 지점 네비게이션 모드에서 작업 할 때 매우 필요하지만 첫 번째 자율 주행 모듈을 설치하여 장애물을 우회하여 운전자의 부하를 크게 줄일 수 있습니다.
계단을 따라 이동할 때 로봇의 이동성을 높이기 위해 트랙의 길이가 이전 프로토 타입과 비교하여 증가되었고 강력한 테일 암이 추가되었습니다. 이 시스템은 조이스틱, 통신 장치 및 강화 된 컴퓨터로 구성된 모듈 형 제어 장치로 제어됩니다. 운전자는 로봇의 움직임을 제어 할뿐만 아니라 더 중요하게는 탑재 된 차량에서 발사 할 책임이 있습니다 оружия일반적으로 Beretta ARX160 5,56 mm 소총 또는 같은 구경의 FN Minimi 경총 또는 40-mm Beretta GLX160 유탄 발사기입니다. 마스트는 그 뒤에 카메라가 장착 된 회전 장치에 타겟을 포착하는 데 사용되며 고정 광각 카메라는 작업자에게 지형의 이미지와 로봇 자체의 전면을 제공합니다. 좁은 필드의 옵토 일렉트로닉스가 무기 장비에 설치되어 있습니다. 왼쪽은 카메라이고, 오른쪽은 DRS Technologies의 비 냉각 열 카메라입니다.
이 시스템은 Nettuno의 육군 훈련장에서 철저히 테스트되었으며 3000 소 구경 카트리지 및 100 수류탄 이상이 총격을 받았습니다. TRP2 FOB 로봇에는 자동 무기를 들어 올릴 수있는 원격 드라이브가 장착되어있어 첫 번째 카트리지가 목표 영역에 도달했을 때만 챔버로 공급되기 때문에 완전히 안전하게 바닥을 떠날 수 있습니다. 이동성에 관해서는, 로봇은 이미 많은 킬로미터를 쳤다. 또한 장례식을 극복 할 수있는 가능성을 시험했으며 1 킬로미터 이상의 범위가 입증되었습니다. Oto Melara는 두 개의 40 강사 교육 과정을 조직했습니다. 그런 로봇 8 대가 이탈리아 군대에 의해 명령되었지만 형식 자격이 지연 되었기 때문에 2 대의 차량 만이 공급되었다. 예비 기술 검사는 7 월 말에 예정되어 있었고, 그 후에 하나의 시스템이 테스트를 위해 운영 단위로 보내질 수 있고, 두 번째 시스템은 전자기 호환성 테스트를 완료 할 수있었습니다. 이탈리아 파병대가 곧 아프가니스탄을 떠날 것이기 때문에, TRP2 FOB 로봇이 거기에 배치 될 것 같지 않습니다.

2-mm 자동 무기와 단발 5,56-mm 유탄 발사기로 구성된 TRP40 FOB 로봇의 군비의 중간 지점

TRP2 지정을 유지하지만 TRP2 Rista 로봇은 TRP2 FOB와는 완전히 다른 섀시를가집니다. Selex ES의 Mini Colibri 터치 킷이 있습니다.
TRP2 Cavalry라고도 알려진 TRP2 RISTA 로봇 (정찰, 정보, 감시 및 목표 수집 - 정보 수집, 정보 수집, 관찰, 탐지 및 발작)은 약간 다른 섀시를 가지고 있습니다. 그것은 계단을 따라 이동할 때 좋은 이동성을 보장하는 거꾸로 된 사다리꼴 형태의 애벌레로 구별됩니다. 로봇은 특정 정찰 작업을 수행하도록 설계되었으므로 20 kg보다 작은 무게의 등판 뒤에서 착용 한 각 모듈로 분해 할 수 있습니다. 필요할 경우 포기하여 출발 지점으로 운반 할 수 있습니다. 최대 전투 체중은 평평한 표면에서 90 kg 및 15 km / h입니다. 온보드 장비는 판토 그래프 유형의 팔에 올라있는 Selex ES의 광학 전자 스테이션 Mini Colibri 형태로 제공됩니다. 이 센서 패키지는 320 ° 시야각을 가진 240x4,6 해상도의 비 냉각 열 화상 카메라, 2,4 °에서 46 °까지의 시야를 증가시킨 날마다 CCD 카메라 및 눈에 안전한 4000 미터 범위의 레이저 거리계를 포함합니다. 암은 ± 180 ° 회전 할 수 있으며 센서 헤드는 ± 40 °의 경사각을 갖습니다. 이 로봇은 이탈리아 군대의 정찰 부대와 함께 사용할 Freccia Explorer 8x8 버전의 단거리 정찰 기능을 제공합니다. 장거리 인텔리전스는 OTO Melara의 Horus UAV에 위탁되어 120 mm 구경의 총구 또는 Freccia Explorer 정찰 버전에 설치된 동일한 구경의 라이트 파이프에서 시작할 수 있습니다.
Oto Melara는 또한 이탈리아 군이 사용하는 기존의 폭발물 처리 시스템을 대체하기 위해 약 2 kg의 마스크와 300 kg의 가면을 지닌 TRP100 HD 로봇 (헤비 듀티 - 혹독한 작업 조건)을 개발 중입니다. HD 모델의 무장 버전은 더 큰 구경의 무기, 7,62-mm 기관총 또는 기타 무기 시스템으로 무장 할 수 있습니다. TRP2 HD는 개발 및 민간 옵션을 제공하기 때문에 경제 개발부의 일부 자금 지원을받습니다.
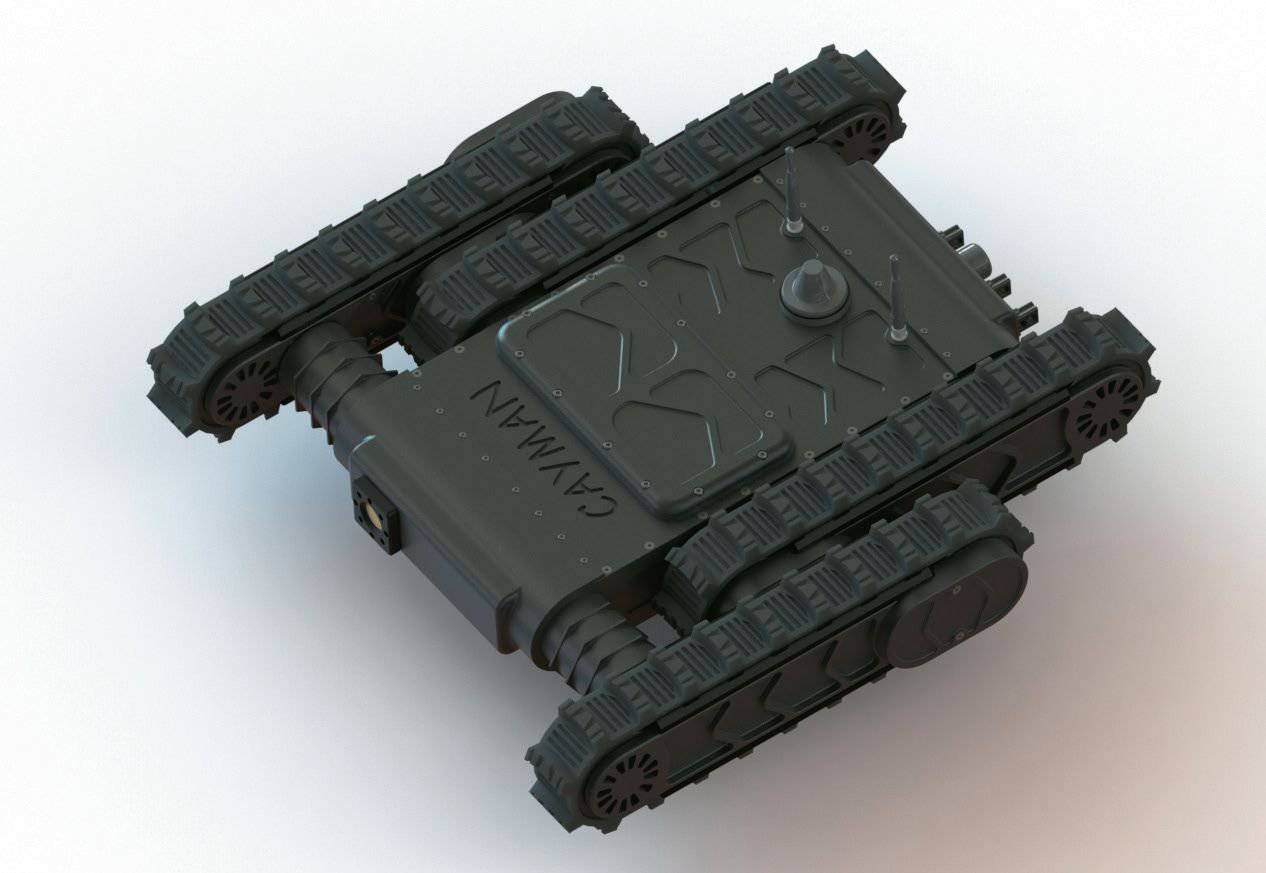
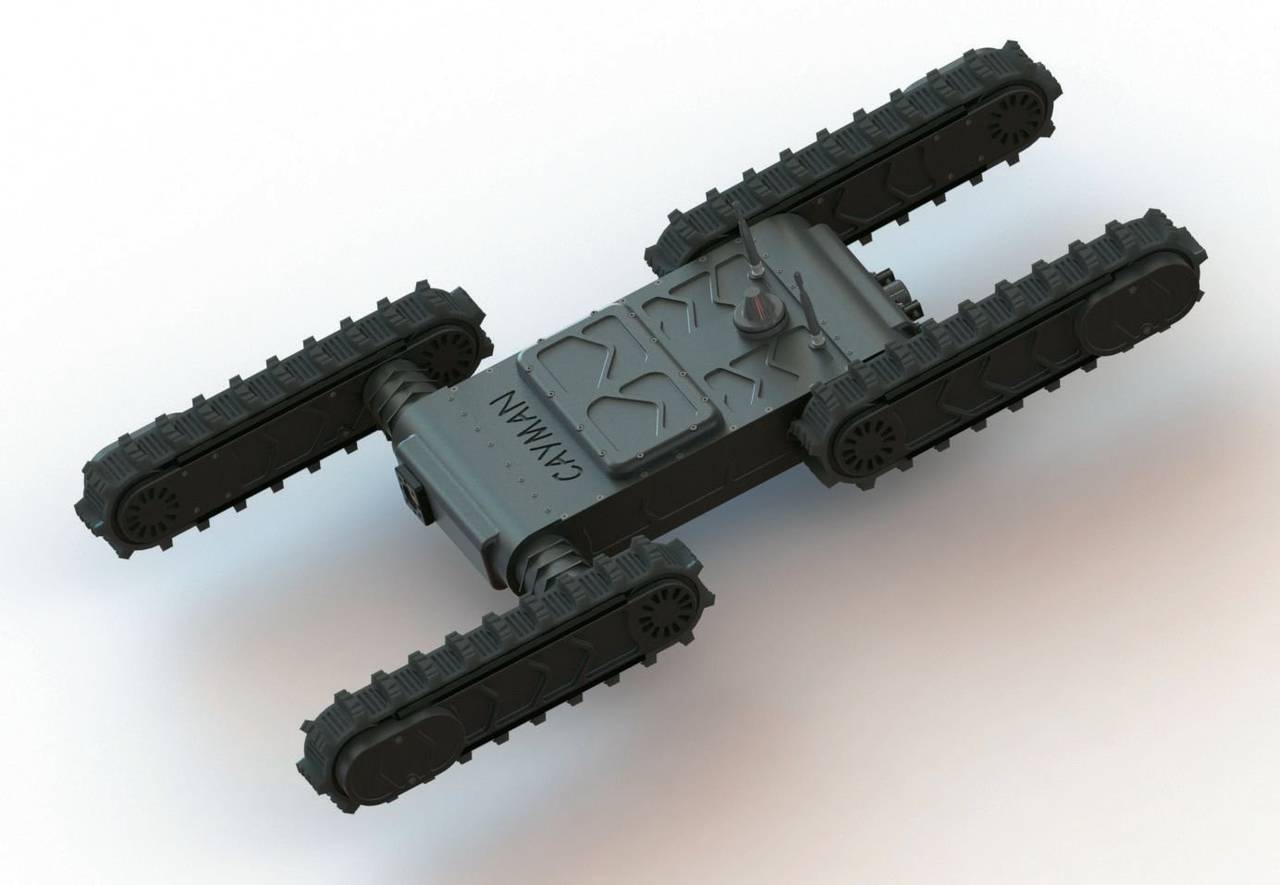

Cayman 로봇은 Tecrdon과 달리 4 개의 회전 트랙을 사용하여 로봇이 어려운 장애물을 극복 할 수있게 해주 며, 건축물의 운송 중에 크기가 크게 줄어 듭니다.



Tecdron의 Quator는 트레일러와 함께 150 kg까지 운반 할 수 있습니다. 플랫폼 중량 29 kg의 유효 숫자
테크 롱 (Tecdron) 무거운 지상 로봇의 범주에서 프랑스 회사 Tecdron은 세 가지 시스템을 제공합니다. 그 중 첫 번째로, 케이맨 로봇은 4 개의 트랙 각각이 자체 전기 모터를 회전시키기 때문에 다소 독특한 아키텍처를 가지고 있습니다. 접히면 2 개의 후면 트랙이 내부 트랙을 따라 접혀있는 동안 회사의 전통에 따라 항공기 합금으로 만들어진 장치 본체를 따라 회전하고 잠급니다. 로봇이 계단을 따라 자유롭게 움직일 수 있도록 두 개의 엔진이 섀시에 설치되어 트랙을 회전 시켰습니다. 비정상적인 추적 솔루션을 사용하면 최적의 이동성을 얻을 수 있으므로 Cayman 로봇은 55 ° 경사면에 대처하고 50 ° 경사면을 따라 이동할 수 있습니다. 최대 속도는 6-8 km / h입니다. 로봇 무게는 26 kg이며 20 kg까지 무게를 측정 할 수 있습니다. 장치는 1 미터의 깊이까지 방수되며 모든 표면은 부식 방지 처리가되어 있습니다. Tecdron 또는 고객이 추가 장치를 통합 할 수 있습니다. 이 로봇의 플러그 앤 플레이 인터페이스는 현재 개발 중입니다.
표준 센서에는 LED 백라이트와 마이크가있는 전면 광각 카메라, 그러나 시야를 개선하기 위해 두 번째 카메라는 짧은 경첩이 달린 암에 설치됩니다 (카메라가있는 손이 몸에 접히고 작동하는 동안 높이가 약 350 mm까지 올라갑니다). 데이터 채널은 1km의 시야를 제공합니다 (도시의 300 미터). 운영자는 7-inch 화면이있는 미니 콘솔 또는 강화 된 노트북을 사용하여 제어합니다. 12 Ah 용량의 20 리튬 이온 배터리는 두 번째 배터리가 이번에는 두 배로 늘어나더라도 연속 3 시간 작동합니다. Tecdron은 x36 배율의 파노라마 헤드에 비디오 카메라, 열 화상 비디오 카메라, 레이저 거리 측정기, 가스 센서 등과 같은 다양한 온보드 장비를 제공합니다. Cayman은 Eurosatory 2014에서 첫 선을 보였지만 잠재 사용자로부터 이미받은 의견은 의심 할 여지없이 다음 개선 버전으로 이어질 것입니다.
테 크론 (Tecdron) 포트폴리오의 케이먼 (Cayman) 휠은 4 kg 무게의 Quator 4x29 로봇과 직경이 260 mm 인 휠로 구성됩니다. 드라이빙 성능은 추적 아날로그보다 약간 좋지만 45 ° 슬로프 및 40 ° 측면 슬로프에도 여전히 대응합니다. 200 mm의 높이로 장애물을 극복 할 수 있습니다. 그것은 캐터필라 케이맨과 같은 센서 세트를 가지고 있습니다. 유일한 차이점은 뒤쪽에 설치된 두 번째 카메라에 있습니다. 리튬 이온 24 볼트 배터리는 30 Ah 용량이 크며 충전 시간은 4 시간입니다. Quator는 50 kg까지 무게를 실을 수 있고 100 kg의 하중으로 트레일러를 끌 수 있습니다. 특수 고정 장치를 사용하면 후방 카메라를 사용하여 예고편을 로봇에 연결할 수 있습니다. Quator는 동일한 데이터 채널을 갖추고 있으며 Cayman 로봇과 동일한 하드웨어를 사용할 수 있습니다. 이 시스템은 대량 생산으로 완벽하게 구현되어 있으며 프랑스 군대도 사용자 중 하나입니다. Quator의 경우, 개발의 마지막 단계에있는 로봇 팔뿐만 아니라 애벌레가 개발되고 있습니다.
Tecdron 로봇 챔피언은 Quator XL 4x4입니다. 그의 이름은 이전 로봇의 이름과 비슷하지만 접두사 XL은 260 kg의 무게와 500 kg의 하중을 견딜 수있는 능력에 대해 말합니다. 주요 임무는 발 병사를위한 장비를 운반하는 것이지만, 정찰 장비를 발에 설치할 수 있습니다. 직경이 390 mm 인 각 휠은 1500으로 곱해질 때 4 W 전기 모터에서 회전하기 때문에 견인력이 뛰어나며 40 ° 슬로프 및 35 ° 측면 경사를 극복 할 수 있습니다. 수직 장애물의 높이는 300 mm이며 최대 속도는 15 km / h입니다. 이전 모델과 마찬가지로 반자동 시스템이 아직 최종 단계에있는 Quator XL에 통합되지만 최대 1km 거리에서도 원격 제어가 가능합니다. 로봇은 건설 자재, 센서 및 인간 - 기계 인터페이스와 관련하여 Tecdron 로봇의 전형적인 특징을 가지고 있습니다. Quator XL은 완벽하게 완성 된 제품이지만 Tecrdon은 어려운 지형에서 지형을 개선하기 위해 새로운 휠 옵션을 테스트하고 있습니다.
어려운 지형의 경우 Tecdron은 높이 215 mm의 수직 장애물을 극복 할 수있는 200 kg 용량을 갖춘 40 kg 추적 시스템 인 Scarab LX를 제공합니다. 이 로봇은 정찰 임무에 적합하기는하지만, 해체 작업 및 위험 지역의 단거리 검사에 특히 유용 할 수 있습니다.

Tecdron에서 추적 한 Scarab LX
요르단 전자 물류 지원 : 제조업체의 이름은 멀티 태스킹 플랫폼으로 제공되는 Lynx 추적 시스템이 요르단에서 개발되었음을 알려줍니다. 섀시의 무게는 120 kg이며 2 개의 전기 모터로 구동됩니다. 드라이브가있는 두 가지 색상의 CCD 카메라가 전면과 후면에 설치됩니다. 로봇 암, 발파 장비, 지게차, x26 광학 줌 및 x12 디지털 줌이 장착 된 파노라마 헤드 카메라 등 다양한 온보드 장비 키트가 제공됩니다. 지뢰 제거 옵션은 Lynx-E / J.로 알려져 있습니다. Lynx-C는 M16 소총 또는 7,62-mm 기관총이나 로켓 발사기를 설치하는 원격 제어 전투 모듈이있는 전투 구성입니다. Lynx 로봇은 Jelson Soldier Modernization Program Jels의 일부이며이 시스템의 정보 관리 구조에 통합되도록 설계되었습니다.
KADDB : 요르단의 또 다른 회사 인 KADDB는 2014xXNNXX 구성의 새로운 다기능 로봇 다기능 로봇 (MFM)을 Sofex 6 전시회에서 선보였습니다.이 다기능 로봇은 각 바퀴가 전기 모터를 회전시킵니다. 전방 및 후방 휠은 선체로부터 연장되어 6 °의 각도로 사실상의 장애물을 극복 할 수 있습니다. MFR은 90 mm의 폭, 150 mm의 폭을 가진 트렌치, 450 km / h (느린 속도 12 km / h)의 속도로 포드를 통과 할 수 있습니다. 배터리는 3 시간 동안 작동합니다. MFR 로봇에는 표준 2 대의 제어 카메라 (앞면과 뒷면에 하나씩)와 마이크와 라우드 스피커가있는 양방향 오디오 시스템 외에 다양한 장비와 무기가 장착 될 수 있습니다.
이번 전시회에서 로봇은 포탑과 함께 전시되었습니다. 회사 홍보 담당자가 2 킬로미터를 주장하더라도 800 계량기에 대한 광고 팜플렛에 대해 이야기합니다. 옵트론 조준 카메라가 포탑에 장착되어있어 작업자가 사람, 소형 자동차, 대형 자동차, 건물 등 타깃의 비교 치수를 기반으로 거리를 측정 할 수 있으므로 레이저 거리 측정기가 필요하지 않습니다. 포탑에는 러시아 - 요르단 개발 용 RPG-32 하심 로켓 발사기 2 대가 장착되어있다. 압전 점화로 200이 시작됩니다. 7,62-mm 기관총을 추가 할 수 있습니다. MFR 로봇은 아직 프로토 타입 단계에 있습니다. 그리고이 새로운 지상 시스템이 과거에 보여준 로봇을 대체 할 것인지는 불분명하다.


요르단 회사 인 KADDB는 다양한 카테고리의 지상 로봇 시리즈를 개발했습니다. SOFEX 2014 전시회에서 발표 된 MFR 로봇은 두 개의 로켓 발사기 (위 사진)
러시아 군대 : 러시아는 최근에 민감한 지역의 보안을 강화하기 위해 전략적 미사일 군대에 배치되도록 설계된 무장 로봇을 전시했습니다. 로봇은 MRK-002-BG-57라는 명칭을 받았다. 추적 섀시를 기반으로했으며 전체 시스템 무게는 약 1100 kg이다. 개발자 회사의 이름이 지정되지 않았습니다. 대체로 로봇은 250 km의 파워 리저브, 35 km / h의 최대 속도 및 10 시간의 지속 시간을 갖는 하이브리드 추진 시스템을 갖추고 있습니다. 안정화 된 전투 모듈 뒤에 위치한 발전소는 로봇 플랫폼의 중앙에 설치됩니다.

전략적 미사일 부대의 안전을 향상시키기 위해 러시아는 무거운 기관총으로 추적 로봇 플랫폼 MRK-002-BG-57를 개발하고 무장했다.
러시아 출처에 따르면 로봇은 자동 및 반자동 모드에서 목표물을 겨냥, 추적 및 사격 할 수 있습니다. 포탑에는 주간 열 화상 카메라, 레이저 거리 측정기 및 탄도 컴퓨터가 장착되어 있으며 장거리 관측을 위해 레이더 시스템을 사용할 수 있습니다. 가이드 카메라도 섀시에 설치됩니다. 7,62 카트리지가있는 Kalashnikov 39x500 또는 12,7 카트리지가있는 30-mm 기관총 또는 30-mm 자동 유탄 발사기 또는 AG-17A 또는 AG-30과 같은 다양한 무기를 로봇에 장착 할 수 있습니다. 시야에서 통신은 최대 5 킬로미터의 거리에서 보장됩니다.
정보