지상 로봇. 버려진 시스템에서부터 무인 교통 호송 (6 마지막 부분)

전자 제어식 자동 기어 박스, 전자 제어 스로틀 플러스 및 전기 제어 스티어링 시스템은 현재 현대 자동차의 표준 요소가되고 있으며, 로봇 플랫폼 개발자는 천국의 마나입니다. 실제로 제어 신호를이 기계의 기존 프로세서 장치에 쉽게 통합 할 수 있으므로 이전에 필요했던 부피가 큰 드라이브를 점차적으로 매립 식으로 보낼 수 있습니다.
이러한 시스템의 특별한 이점은 한 시스템에서 다른 시스템으로의 전송을 허용 할뿐만 아니라, 궁극적으로, 그들은 "임베디드 컨트롤"시스템이 본질적으로 자동차의 설치 현장에 남아있을뿐 아니라이 차량의 정상적인 사용 (즉, 수동 제어)으로 돌아 가기 위해 간단히 꺼지게 될 정도로 싸게 될 것입니다.
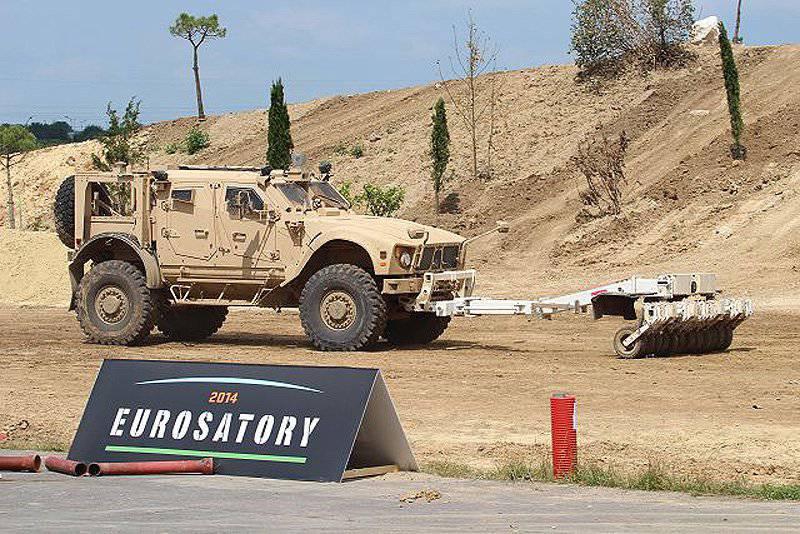
Eurosatory 2014에서 Oshkosh가 보여준 롤러 트롤을 장착 한 M-ATV에는 Terramax 로봇 키트가 장착되어 있으며,이 키트는 그림의 하단 모서리에 센서가 표시되어 있습니다.


지붕에 설치된 센서 클로즈업 로봇 Terramax는 자신보다 앞서 나가는 것에 대한 명확한 개요를 제공하지만 문제가 발생합니다-왜 앞 유리가 그렇게 깨끗합니까!
오슈 코쉬 : 미국의 대형 차량 제조업체 중 무거운 로봇 차량 분야의 선두 업체는 물론 Oshkosh Defense 회사입니다. 그녀는 Darpa Advanced Defense Research Director의 요구에 따라 2000-x 초기에 로봇 기술을 개발하기 시작했습니다. 수년간의 개발 및 개선 끝에 8 월 2012에서 미국 해병대 전투 실험실과 Oshkosh Defense는 TerraMax 기술을 적용하여 수송 호송 장치를 시험했습니다. 수송 호송 장치는 기존의 5 대의 무인 차량과 2 대의 무인 차량으로 구성되었습니다. 후자는 원격 제어 장치가있는 운영자의 통제하에 있음에도 불구하고 오프라인으로 이동했습니다. 이 회사는화물 호송 장치가 적과의 접촉을 극대화하기위한 로봇을받는화물 로봇 프로그램과 관련하여 해군 연구청에 대한 약속을 유지하는 한편 Oshkosh는 지속적으로 업그레이드 된 TerraMax 시스템에 대한 다른 응용 프로그램을 찾고 있습니다 .
AUVSI 2014 및 Eurosatory 2014에서 Oshkosh는 오프라인 작업이 가능한 Humanistic Robotics 셀프 트레일러를 갖춘 M-ATV 장갑차를 선보였습니다. 차의 동적 특성은 트롤에 적용되었으며 향후 2 년 내에 오쉬 코쉬는 디밍 루트 분야에서 실험을 계속할 것입니다. 파리에있는 시범 모델에는 지붕 장착형 라이더 (레이저 로케이터)가 장착되어 있습니다. 그것은 주요 센서로 간주되며 차량의 각 구석에 설치된 레이더를 "돕는"높은 분진 상태에서 특히 효과적입니다. 또한 광학 전자 센서를 사용하여 작업자는 환경에 대한 명확하고 정확한 시각적 정보를 얻을 수 있습니다. 시스템의 근대화는 주변 지형의 개선 된 인식에 필요한 고해상도 센서에 대처할 수있는 새롭고 빠른 컴퓨터의 개발 및 설치로 주로 이루어졌으며 먼지 또는 녹색으로 된 장애물 및 수상한 물체의 감지를 포함하여 차가 더 빨리 움직일 수있게 해줍니다 (밤에 운전자가 더 강력한 헤드 라이트의 관점에서 더 빨리 운전할 수있는 것처럼). 새로운 키트는 TerraMax 시스템에 새로운 유형의 센서를 쉽게 설치할 수있는 개방형 아키텍처를 갖추고 있습니다.
록히드 마틴 : Fort Hood, 14 올해의 1 월 2014. 4 대의 차량, 2 대의 팔레 타이 징 로딩 시스템 트럭, 굴절 형 M915 트럭 및 험비 호위 차량이 호송을 통해 "거짓 도시"를 넘어 현지 교통, 보행자 등 모든 종류의 장애물을 극복했습니다. 이벤트가 예외적 인 이유는 험비를 제외하고는 호송의 모든 차량이 문자 그대로 운전자가 없었기 때문입니다. 10 월 2012에서 획득 한 계약에 따라 록히드 마틴 (Lockheed Martin)이 개발 한 선택 사양 인 이동성 시스템 인 Autonomous Mobility Appliqué System (Amas)이 장착되었습니다. 작업은 군대 및 해양 차량에 설치할 수있는 저렴한 센서와 모니터링 시스템을 결합하여 운전자의 부담을 줄이거 나 감독하에 자동 완전 주행을 제공하는 멀티 플랫폼 키트를 개발하는 것이 었습니다. 자동차의 경우 수동 운전이 가능하지만 운전자에게 위험에 대해 경고하는 센서 및 모니터링 기능이 추가되었습니다. 군대 통계에 따르면, 수송 기둥의 사고는 대부분 피로와 집중력의 상실로 인해 발생합니다. Amas는 SMSS 로봇으로 획득 한 록히드 마틴의 경험이 지능적으로 사용 된 주조 프로그램 (호송 활발 안전 기술 - 호송 활발 안전 기술)의 일부입니다. 주요 센서는 GPS, 레이다 및 레이더와 특정 수준의 인공 지능을 갖춘 제어 시스템을 통해 의사 결정을 내리는 센서입니다. 두 번째 일련의 시연 테스트가 에너지 부의 Department of Energy를 증명하는 Savannah River에서 올해의 2014 년 6 월에 완료되었습니다.

추가 자율 이동 시스템 자율 이동 애플리 케이션 시스템은 호송 활성 안전 기술 호송 활성 안전 기술 프로그램의 일환으로 록히드 마틴 (Lockheed Martin)에 의해 개발되었습니다.
무인 리더 차량은 시험에서 65 km / h까지의 속도로 Amas 시스템이 장착 된 6 개의 자율 시스템 칼럼을 따라 갔다. (칼럼의 길이 또한 테스트에서 두 배가되었다.) 모든 차량은 FMTV 제품군의 중형 및 대형 트럭으로, MTVR 1 대, PLS 2 대, M915 트랙터 1 대, HET 1 대였으며 7 월 2014에서 안전성 테스트를, 7 월 -8 월 2014에서는 성능 테스트를 실시했습니다.
미라 : 영국 회사 인 Mira는 고급 차량 및 시스템을 전문으로 취급하며 그 중에 로봇 공학이 있습니다. 회사는 플랫폼 독립적 인 Mace 키트 (Mira Autonomous Control Equipment - Mira 자율 제어 장비)를 개발하여 고객의 요구에 따라 필요한 자율성 (원격, 반자동 및 자율 모드)을 확보 할 수있는 거의 모든 지상 기반 플랫폼에 통합 할 수 있습니다. Mace는 잠재적 인 어플리케이션 (해체 된 보병의 물류 지원을위한 Sherpa 및 Land Rover 차량을 기반으로 한 솔루션 이었지만 Mace 키트를 기반으로하는 Guardians 모니터링 키트가 장착 된 자동차는 주변 보호 플랫폼 인 4X4로 사용됨)을 보여주기 위해 다양한 기계에 설치되었습니다. .

플랫폼 독립적 인 로봇 키트 영국 회사 Mira가 개발 한 Mace는 방향 지뢰 탐지를 위해 랜드 로버 차량의 아프가니스탄에 배치되었습니다.
현재 구현 된 MACE 솔루션 중 하나는 프로젝트 파나마 시스템으로, 경로 확인 및 비우기를위한 무인 시스템으로 작동합니다. 이 시스템은 2011 이래로 아프가니스탄에서 사용 중이며, 폭탄 탐지에 사용되며 Snatch Land Rover (SN2) 모든 지형 차량을 기반으로합니다. 파나마 기계는 인원의 최대한의 안전을 보장하기 위해 20km까지의 거리에서 원격 및 자율 모드로 사용됩니다. 6 월 중순 2014에서 영국 군대는 2030 및 파키스탄이 MACE 기술 플랫폼의 추가 개발을 보장 할 때까지 파나마가 계속 근무할 것이라고 발표했습니다. AUVSI에서 Mira는 도로변을 테스트 할 수있는 능력을 보여주었습니다. 몇 년 동안 라이더와 레이더를 사용한 후, 새로운 시스템의 중점은 기술 비전을 사용하여 수상한 물체를 탐지하는 데있었습니다. 이는 비용뿐만 아니라 기술 비전을 사용하는 감지 시스템이 라이더 기반 시스템보다 훨씬 작은 규모이지만 추가 유형의 센서를 사용하면 추가 데이터를 시스템으로 전송할 수 있으므로 결과적으로 안정성과 정확성이 향상됩니다.
Ruag : 스위스 회사 인 Ruag Defense는 전통적인 자동차를 통제 된 자율성이있는 기계로 변형 할 수있는 키트도 개발 중입니다. 이 키트는 Vero (Vehicle Robotics)라는 이름으로 GDELS Eagle 2012 경 장갑차에 탑승 한 올해의 4 봄에 처음 전시되었습니다. 이 시스템은 원격 제어 모드의 Eurosatory 2014 전시회에서 선보였으며 연속 좌표로 표시된 사전 계획된 경로를 따라갈 수도 있습니다. 원격 제어 모드에서만 작동하는 2012에 표시된 시스템과 비교할 때 파리 전시장의 차량에는 장애물 회피 센서가 전면에 설치되어 있습니다. 두 개의 라이더가 범퍼의 왼쪽과 오른쪽에 설치되었다 (결국, 먼지로부터의 왜곡을 줄이기 위해 후드로 옮겨 질 것이다). 그리고 레이더는 특수 광학 센서 라 불리는 다른 장치와 함께 오른쪽 범퍼의 중앙에 설치되었다.
Ruag Defense에 따르면 소프트웨어 및 장비의 자격에 대해 몇 개월 간의 테스트를 수행해야합니다. 현재 Vero 킷은 모델이 공개되지 않은 2 대의 군용 차량에 통합되어 있습니다. 그리고 2015에서는 트랙과 휠 사이의 선택이 아직 이루어지지 않았지만 시스템은 약 3 톤 무게의 순전히 로보 틱 플랫폼에 설치 될 것입니다. Ruag는 파트너와 논의 중이며 기존 또는 특수 설계된 플랫폼에 Vero 시스템을 설치할 것인지 결정해야합니다.

무인지면 대리 로봇 복합 단지는 Polaris MVRS700 6x6 섀시를 기반으로 Torc Robotics에 의해 개발되었습니다.

스위스 회사 인 Ruag는 현재 GDELS Eagle 4에 설치된 Vero 키트를 연구하고 있습니다. 일부 센서는 지붕에 설치되고 일부 센서는 범퍼에 설치됩니다
Torc Robotics : 군대, 광업, 엔지니어링 및 농업 분야의 로봇 솔루션 전문가 인이 미국 회사는 현재 지상 지원 로봇 Ground Unmanned Support Surrogate (Guss)의 해병대 프로그램에 참여하고 있습니다. 2010에서 Torc Robotics는 전투 상황에서 군대에 물품을 제공하고 해병대의화물을 운송하거나 부상당한 사람들을 대피시킬 수있는 경량 장비의 개발에 관여했습니다. 로봇 모듈의 도움으로 Torc Robotics는 4 대의 Polaris M VRS700 6x6 버그 차량을 900 kg 주변의 하중을 수용 할 수있는 로봇 도구로 변형했습니다.
AutoNav 모듈은 세 가지 다른 작동 모드 (지정된 점을 통한 탐색, 나 및 원격 제어)를 통해 로봇 차량을 얻을 수있게 해주는 핵심 요소입니다. 인터페이스는 수동 WaySight 장치로, 운영자가 장비의 모니터링 및 모니터링뿐만 아니라 작동 모드를 선택할 수 있습니다. 이 기술은 정련되어 V-1161 Osprey 내부로 운송되는 해병대가 선택한 차량 M22 Growler로 전송되었습니다. 이 프로그램은 현재 Guss AITV (Autonomous Internally Transportable vehicle - 자율 기계가 내부로 운송 됨)라는 약어로 알려져 있습니다. 터치 키트에는 관성 항법 시스템, 카메라 및 라이더가 포함되어 있습니다. 그는 6 월 하와이에서 Rimpac 2014 연습 도중 실제 연습에서 처음으로 테스트를 받았으며 부상당한 대원을 대피시키고 보병의 부담을 덜어 줄 작전에서 실제 가치를 보였습니다. 운동이 끝난 후 몇 가지 기술적 개선이 필요하다는 사실이 확인되었습니다. 이 회사의 추가 모듈 형 시스템은 또한 비행장 활주로 검사 특수 검사원 그룹의 위험을 줄이기 위해 활주로에서 잠재적 인 토양 이질성을 평가할 수있는 로봇 어썰트 존 터미널 평가 키트를 개발하는 데 사용되었습니다. 이 키트는 Guss 로봇 자동차 용으로 개발 된 많은 기술을 사용하며 MDA의 Mosquito 토양 채취 기가 장착 된 Polaris LTATV 차량에 설치됩니다.

MDA의 모기 토양 채취 기가 장착 된 Robotic Assault Zone Terminal 평가 키트가 장착 된 Polaris LTATV 로봇 식 차량 (작업 위치에 있음)
Polaris 자동차는 Darpa Advanced Defense Research Authority에 의해 다양한 기원의 재난 구조 시나리오 시뮬레이션과 함께 Robotics Challenge 경쟁에 참여하기 위해 최근 선정되었습니다. Polaris Ranger XP 900 EPS 차량에는 로봇 장비가 장착되어 있었고 원격 제어 기술인 SafeStop Electronic Throttle Kill 및 Brake Actuation (전자 스로틀 제어 및 브레이크)이 장착되어있었습니다. 자연 재해 및 인공 재해 모델링을위한 현장에서 차량의 이동성을 보장합니다. 부하 용량이 453 kg 인 플랫폼에는 로봇 전원 공급 시스템이 설치되었으며, 기내에는 로봇이 기계와 작업하기에 충분한 공간을 확보 할 수 있도록 벤치와 조향 칼럼이 조정 가능한 경사로 설치되었습니다.

Polaris Defense는 자동차를 만들 때 '로봇 화'에 대해 점점 더 많은 생각을하고 있습니다. 그녀의 Ranger XP 900 EPS는 Darpa에 의해 재해 복구 작업을 시뮬레이션하는 로봇 플랫폼 경쟁에 참여하기 위해 선택되었습니다.

Torc Robotics는 Guss 프로그램에서 얻은 경험을 사용하여 Osprey 변환판에서 운송 된 M1161 카를 로봇 화했습니다. 결과로 나온 Guss AITV 시스템은 Rimpac 2014 연습에서 시연되었습니다.

Kairos Pronto4 Uomo는 인간의 기능과 매우 흡사 한 옵션 키트입니다. 그것은 표준의 사람이 작동하는 차량의 택시에 단 몇 분 안에 설치할 수 있습니다.
카이로스 Autonomi : 드라이버를 인체의 구조를 모방 한 기계적 디자인으로 바꾸지 않는 이유는 무엇입니까? Kairos Autonomi의 엔지니어들은 GPS 좌표를 원격 제어하고 제어하기 위해 표준 로봇에 10 분 만에 설치할 수있는 추가 로봇 키트 Pronto4 Uomo를 제작하여이 길을 따라갔습니다. 이 시스템은 2013 년도에 나타 났으며 무게는 25 kg에 불과하며 가방으로 접 힙니다. 금속 구조는 사람의 움직임, 브레이크 및 가스 페달의 두 "다리"프레스, 유니버설 조인트의 "팔"을 시뮬레이션하여 스티어링 휠을 회전시킵니다. 이 시스템은 표준 BA5590 군용 배터리로 작동 할 수 있으며 기계 자체의 온보드 네트워크에 연결하지 않아도되므로 키트 설치 시간이 단축됩니다.
Kairos Autonomi 카탈로그에는 Pronto 4과 같은 전통적인 보완 세트가 있습니다. 이 모듈 형 시스템은 일반 기계를 로봇 화하여 원격 제어에서 반자동에 이르기까지 다른 수준의 자동화를 제공합니다. 키트를 설치하는 데는 4 시간도 걸리지 않습니다. Pronto 4 세트 - 컴퓨터 모듈에 의해 수행되는 "두뇌"역할 중 몇 가지 모듈이며, 인터페이스 모듈 (스티어링 휠, 브레이크, 가스 및 기어 용 액추에이터)을 사용하여 차에 연결할 수 있습니다. 이 시스템은 다양한 구성으로 제공되며 총 무게는 약 10 kg입니다.
Selex ES : 이 회사는 차량의 로봇 화 (가능한 경우)로 순찰 그룹의 위험을 줄이기 위해 밀라노 회사 인 Hi-Tec의 도움을 받았다. 특히 보호가 덜되고 따라서 비용이 저렴한 기계의 로봇 화가 그 것이다. 개발 된 시스템 인 Acme (Automated Computerized Mobility Equipment)의 경우 Hi-Tec은 액추에이터, 네비게이션 시스템, 데이터 처리 및 소프트웨어를 제공하고 Selex는 좁은 원형의 적외선 및 데이 비전 시스템을 제공합니다 (360 °에서) 시야, 적외선 조명, 감각 데이터 및 시뮬레이터의 시스템 분석.
Selex ES는 이제 최종 구성을 승인했으며 최종 프로토 타입은 2014 가을에 예상됩니다. 현재의 Acme 시스템은 국제 무역 규칙의 제한으로부터 완전히 자유 롭다. 무기2015을 시작할 때 대량 생산을 준비해야합니다. Selex ES는 이미 많은 잠재 고객과 협상 중입니다. 인터페이스와 구동 시스템은 30 분 안에 설치됩니다. 탄소 섬유 스티어링 시스템 버전은 7 kg과 비교하여 12 kg의 무게를가집니다. 28 Nm의 토크를 가진 스테퍼 모터는 18에서 180 rpm까지의 회전 속도를 제공합니다. 네비게이션 센서에는 시간당 0,5 % 편차가있는 관성 측정 반도체 장치 (Galileo 및 GLONASS와 호환되는 Acme)가있는 QinetiQ Canada의 2 안테나 GPS 견고한 GPS가 포함됩니다 (GPS 신호가 손실되었을 때이 장치가 사용됨, 일반적으로 짧은 거리 시간). 지붕 장착형 레이저 스캐너는 장애물을 피합니다. 시스템 질량은 60 kg이고, 자동 모드에서 최대 속도는 40 km / h이며, 원격 모드에서는 회사가 100 km / h를 초과하는 것을 권장하지 않습니다. Acme 시스템은 항상 운영자의 감독하에 있어야 함을 유의해야합니다. 0,5 km / h 속도의 편차와 함께 2 센티미터의 정확도로 미리 결정된 경로를 반복 할 수 있습니다. 스로틀 스테퍼 모터는 14 mm / s의 속도로 kg 힘 300를 제공합니다. 공압 시스템은 클러치 및 브레이크 액추에이터에 사용되며 60 kg / mm2의 속도로 300 kg의 힘을 제공합니다. Acme 시스템의 경우 새로운 지리 정보 맵을 사용할 수 있습니다 (지형 참조). Selex ES가 젊은 군인에게 더 일반적인 게임 형 제어 시스템으로 이동하기로 결정한 이후 강화 된 푸시 버튼 제어 콘솔이 개발되었습니다. Selex ES는 현재 원형보기를 얻기 위해 이미지를 "스티치"하는 프로그램을 개발 중입니다. 궁극적으로 (아마도 2015 연말까지) 원격 운전을 위해 설계된 3D 헬멧에 구현됩니다.

Acme의 자동화 된 컴퓨터 화 된 이동성 장비 (자동 컴퓨터 화 된 이동성 장비)는 최근 새로운 센서로 업그레이드되었습니다. 이 회사는 또한 새로운 인간 - 기계 인터페이스를 개발하기 위해 노력하고 있습니다.
오토 멜라라 : 이탈리아 회사 인 Oto Melara는 원래 민간용으로 개발 된 추가 시스템을 제공합니다. 리모컨 키트에는 스티어링 휠, 페달 및 기타 컨트롤을 움직일 수있는 몇 가지 액추에이터가 포함되어 있습니다. 이 시스템은 약 1 시간 만에 설치 및 제거가 가능하지만, Oto Melara는 현재 "스마트 트랜스 포트 컬럼"의 요구에 부응하여 새로운 시스템을 개발 중입니다.

Guardium 시리즈 로봇으로 얻은 풍부한 경험을 바탕으로 한 이스라엘 회사 인 G-Nius는 지상 기반 플랫폼을 무인 시스템으로 변형 할 수있는 로봇 키트를 개발했으며, 그 중 "뇌"는 사진에 표시되어 있습니다
G-Nius : 위에 설명 된 로봇 기계 외에 이스라엘 회사 인 G-Nius는 특정 로봇에 적응하기 위해 명백한 기계적 변이가있는 무인 시스템으로 지상 플랫폼을 돌릴 수있는 새로운 로봇 키트를 개발했습니다. 이전의 G-Nius 시스템이 많은 블랙 박스로 구성 되었다면이 신제품은 기능성 컴퓨터, 내비게이션 유닛, 비디오 오디오 시스템 및 전원 분배 장치를 포함하는 단일 상자로 구성됩니다.
표준 센서에는 주간 / 야간 비 냉각 열 화상 카메라, 후방 및 측면 카메라 및 통신 시스템, 장애물 회피 시스템이 추가 될 수 있습니다. 이 시스템을 사용하면 서로 다른 수준의 자율성을 가진 네 가지 모드로 작업 할 수 있습니다. 직접 시야에서 20 km 거리에서 작동이 보장되지만 더 먼 거리에서도 위성 통신을 추가 할 수 있습니다. 새로운 로봇 키트는 연결된 장비에 의존하지 않으므로 정찰 시스템 및 소음 장치부터 무기에 이르기까지 모든 유형의 장치를 키트에 연결할 수 있습니다. G-Nius는 가벼운 바퀴 달린 차량부터 보행 추적 차량까지 다양한 플랫폼 플랫폼을위한 키트를 제공합니다.
사용 된 재료 :
www.otomelara.it
www.hdtglobal.com
www.nexter-group.fr
www.irobot.com
www.reconrobotics.com
www.novatiq.com
www.oshkosh.com
www.lockheedmartin.com
www.mira.co.uk
www.ruag.com
www.torcrobotics.com
www.kairosautonomi.com
www.selex-es.com
www.g-nius.co.il
정보