대형이지만 이동식지면 로봇 파쇄기

크러셔는 DARPA 관리로부터 자금을 지원 받아 Kargnegi-Mellon University의 국립 로봇 센터 (NREC)가 2006에서 만든 자동 지상 기반 장치 (ANA)입니다. Spinner 지정에 따라 NREC가 만든 다른 ANA (Crusher는 2.0의 Spinner 버전이라고도 함)를 기반으로하는 Crusher 프로젝트의 목표는 ANA에서 자금 지원을받는 연구 프로젝트의 목표와 크게 다르지 않습니다. 지각, 자율성 및 기계적 강도. 미국 군대는이 장비에서 무거운 짐을 운반 할 수있는 무인 조용한 탱크를보고 싶습니다. 적으로부터 자신을 보호하고 Hummer 지프가 붙어있는 지형을 통해 최대 속도로 이동하십시오.
분쇄기는 절대로 대량 생산에 들어갈 수 없습니다. 비용이 너무 많이 들었습니다 (제작자는 이러한 수치를 두려워하기도합니다). NREC가 UPI라는 프로그램의 일부로 개발중인 다양한 기술을 테스트하기위한 작동 프로토 타입으로 만들어졌습니다. 미래의 이러한 기술은 새로운 첨단 자동 지상 차량을 개발할 수있게 해줄 것입니다.


UPI는 Unmanned Ground Combat Vehicle PerceptOR(off-road) Integration의 약자입니다. DARPA가 부분적으로 자금을 지원하는 이 프로젝트는 "가장 어렵고 거친 유형의 지형에서 자율적으로 작동하는 대형 자동화 지상 기반 차량의 기능을 평가"하기 위해 여러 실험을 수행하고 있습니다. 크러셔의 무게는 6,5톤으로 스피너보다 30% 가까이 가볍지만 더 많은 화물을 실을 수 있다. 업그레이드 시 로봇 Spinner Center NREC는 새 프로젝트에서 롤오버 후에도 경로를 유지하는 기능이라는 매우 중요한 특성을 유지하지 못했습니다. 이 "멋진" 기능이 사라진 이유는 언급되지 않았지만 로봇의 다른 기능을 구현하거나 주요 목표에 그다지 중요하지 않은 높은 비용을 줄이기 위해 수행되었다고 가정하는 것이 논리적이었습니다. UPI 프로젝트의

크러셔 로봇의 가능성
이 무인 차량은 주로 정찰 및 공급 작업을 위해 만들어졌으며 승선 한 사람이 없기 때문에 거대한 페이로드를 가질 수있는 견고하고 기능적으로 유연한 기계를 만드는 데 새로운 접근 방식을 채택 할 수 있습니다. 예를 들어, 일부 상황에서는 크러셔가 보호를 거부 할 수 있습니다. 따라서 더 많은 페이로드를 사용합니다.
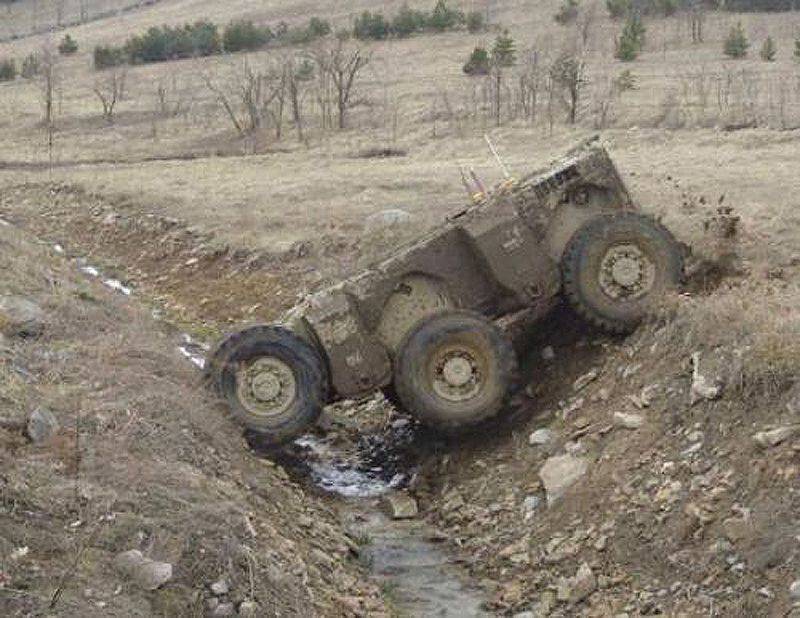
로봇은 견고하고 매우 어려운 지형을 따라 이동하고 도중에 장애물을 극복 할 수 있습니다. 예를 들어 높이가 1,2 미터 이상인 수직 벽, 자란 관목 및 돌층계가 있습니다. 그것은 180도에서 그 자리에서 돌릴 수 있고, 76 cm (126 cm 바퀴의 지름의 절반 이상)에서 조정 가능한 서스펜션으로 인해 지상고를 변경하고 어떤면에 기대어 놓을 수 있습니다. 분쇄기는 4000 kg의 적재 용량을 가지며, 보호 장비와 실제 적재량의 조합이 될 수 있습니다. DARPA 경영진의 대표는 "이 기계는 험비 지프 (Humvee Jeep) 지퍼를 따라 휠체어에 서 회복 불가능하게 손상된 곳으로 이동하는 곳으로 이동할 수 있습니다." 그들의 카메라 덕분에, ANA 크러셔는 3,2 킬로미터의 거리에서 적을 볼 수 있습니다. Сrusher는 40도 이상의 경사면을 극복하고 30도 이상의 경사면을 따라 이동할 수 있습니다. 로봇은 42 km / h의 최대 속도로 가속하지만이 속도는 7 초 이상 유지 될 수 없습니다.


디자인
이 패밀리의 로봇은 알루미늄과 티타늄으로 만든 공간 프레임 구조와 조약돌과 같은 무거운 물체의 충격으로부터 로봇을 보호하기위한 안전 시트를 가지고 있습니다. 로봇에는 배터리로 수 킬로미터 만 이동할 수있는 하이브리드 추진 장치가있을 수 있습니다. 그런 다음 디젤 엔진이 크러셔를 운전하고 배터리를 재충전합니다. 작은 수정과 더불어 디젤은 폭스 바겐 제타에서 잡힌다.
관리 및 제어
ANA Сrusher는 자동 모드에서 완전히 작동하므로 기존 드라이버 제어 기능이 없습니다. 운전자는 X-Box 360 콘솔과 같은 비디오 게임 콘솔을 사용하여 멀리서 로봇을 제어합니다. GPS 시스템을 사용하여 경로의 중간 지점을 이동하는 로봇 크러셔는 목적지까지 가장 쉽고 빠른 길 찾기를 끊임없이 시도합니다. 예를 들어, 1,8 미터 이상의 벽이나 1,8 미터보다 깊은 수로가 나타나면 로봇이 우회 경로를 찾게됩니다.
리뷰 시스템은 1,9 메가 픽셀 해상도의 5 가지 컬러 카메라로 구성됩니다. 이 시스템을 사용하면 가로 세로 200도 및 세로 30 도의 시청 섹터를 일반적인 TV 해상도보다 네 배 높은 해상도로 얻을 수 있습니다.
NREC 센터에 따르면, 크러셔 기술은 여전히 실제 구현에서 멀리 떨어져 있습니다. 우리가 이미 작고 인간이 제어하는 로봇을 전장에서 볼 수는 있지만 크러셔와 같은 대형 무인 차량은 여전히 실험실에 남아 있습니다. 다양한 조건에서 알려지지 않은 지형을 극복하려고하는 대형 로봇에 필요한 지각 및 제어 시스템의 복잡성으로 인해 연구 개발 단계를 벗어날 수 없습니다. 크러셔 로봇의 인식 및 네비게이션 시스템은 프로토 타입 단계에 있습니다. 테스트 플랫폼으로서, 그들은 지상 작업을 수행하기 위해 인간의 개입이 필요하지 않은 지상 전투 차량에 대한 점점 더 혁신적인 접근법을 구현할 수 있습니다.
[미디어=https://www.youtube.com/watch?v=WOD5NF48byo]
사용 된 재료 :
www.nrec.ri.cmu.edu
en.wikipedia.org
www.hightech-edge.com
www.howstuffworks.com
www.youtube.com
www.baesystems.com
www.saabgroup.com
정보