4 엔진 터보프롭 갑판 항공기 (특허 RF № 2402459)가 그들을 동원합니다. Beriev, 2009
갑판 항공기는 해양 분야에 속합니다 항공. 갑판 항공기에는 동체, 접이식 콘솔이있는 날개, 꼬리 장치, 발전소, 이동식 철탑이 달린 페어링 안테나, 랜딩 기어 및 랜딩 후크가 포함됩니다. 발전소는 날개 앞에 위치한 XNUMX 개의 터보프롭 엔진으로 구성됩니다. 날개와 에일러론의 기계화는 날리는 나사 부분에 있습니다. 윙 콘솔에는 팁이 장착되어 있습니다. 항공기의 이륙 거리를 줄이고 항공기의 안전성과 신뢰성을 높이고 비행 시간을 늘립니다.
본 발명은 항공 공학, 특히 해군 항공에 관한 것으로, 군사 작전의 해상 극장 (MTVD)에서의 다양한 과제를 해결하기 위해 무거운 항공기 캐리어 순양함 (TAKR)과 함께 사용하기위한 것이다. Decker 항공기는 장거리 레이더 순찰 및 유도 (ASDF), 대잠 잠수함 방어 (ASR) 및 기타 작업을 수행 할 수 있습니다.
갑판에서 항공기의 이륙을 보장하기 위해 미국과 세계 다른 국가 [1]의 모든 항공 모함에는 발사기가 장착되어 있습니다. 국내 수송선 기반 항공 (PA)은 발사대가없는 쿠즈 네 소프 (Kuznetsov) 제독 (2) 형 TAKR을 기반으로하므로 전투기 및 공격기와 같은 무거운 추력 항공기 만 발사대가 장착 된 갑판에서 벗어날 수 있습니다. TAKR 데크에서 가능한 최대 활주로는 200 미터를 넘지 않아 이륙 도중 엔진 고장으로 정상적인 이륙과 이륙을 보장해야합니다. 따라서 TAKR에는 위의 것 외의 다른 과제물과 헬리콥터가 부분적으로 다양한 작업을 수행하는 항공기가 없습니다.
아날로그를 위해 데크 전투기 Su-33 [3]을 갑판과 격납고 TAKR "Admiral Kuznetsova"에 따라 채택했습니다. 항공기에는 동체, 휩쓸 날개, 트윈 엔진 제트 추진 시스템, 양 꼬리 지느러미, 섀시 및 랜딩 기어가 포함되어 있습니다. 높은 추력을 가지고, 그는 투석기를 가속시키지 않고 짧은 갑판 TAKR에서 벗어나고 심지어 한 엔진의 고장으로도 계속 이륙 할 수 있습니다.
이 항공기의 단점은 발전소의 상당한 연료 소비와 항공기가 장시간 비행 할 수 없으며, 순찰 및 대잠 작전 수행 능력이 제한된다는 것입니다. 그 이유는 연료 보급이 제한되어 있고 대상을 한두 번 방문하면 파괴 할 수 있기 때문입니다. 제한된 연료 탱크의 크기와 항공기의 이륙 중량에 대한 제한 때문에 연료 용량의 증가는 불가능합니다.
따라서 TACR의 갑판에는 장기간 비행 중이며 RLDN 또는 PLO의 기능을 수행 할 수있는 항공기가 없습니다.
프로토 타입으로 가장 근접한 기술 솔루션으로는 미국 HUKAY E-2D [4] 항공기 동체가 포함되어 있습니다. 항공기 동체, 갑판에 날개를 접은 상태, 4의 용골 꼬리 어셈블리, 2 엔진 동력 장치, 이동식 안테나 레이돔 철탑, 랜딩 기어 및 랜딩 기어가 장착되어 있습니다. 항공기의 날개와 기계화는 부분적으로 송풍 나사 부분에 있습니다. 이 비행기는 갑판에서 출발하여 투석기가 장착되어 있으며, 비행기는 투석기 앞쪽 착륙 장치 지지대에 걸려 있고, 엔진이 이륙 모드로 시작하면 투석기가 비행기를 가속시켜이 엔진이 고장 나도 항공기는 한 엔진에서 계속 비행 할 수 있습니다.
투석기를 발사하지 않은 채 표시된 프로토 타입은 항공 모함의 갑판에서 벗어날 수 없습니다.
투석기를 시작하는 것은 부피가 크고 값 비싸며 복잡한 장치로 일정한 성능이 필요합니다. 이륙 단계에서 단 하나의 실패 사례가 발생해도 비행기 추락 사고가 발생합니다. 더욱이 러시아의 기존 TAKR에는 그러한 투석기가 장착되어 있지 않으며 그러한 투석기를 장착 할 가능성조차 없습니다.
본 발명의 과제는 항공기의 안전과 신뢰성을 확보하고, 경제적 인 연료 소비를 갖는 비행기로 PA 함대를 보충하고, 장시간 동안 XRDNS 또는 PLO의 작업을 수행 할 수 있고, 시동 투석기가없는 발판을 갖춘 갑판에서 이륙 할 수있는 항공기의 이륙 거리를 200m로 감소시키는 것이다. 추력 추진 엔진.
기술적 인 결과는 갑판 항공기가 4 개의 연비가 좋은 TVD 유형의 엔진을 장착하여 날개와 그 기계화 및 에일러론이 프로펠러 영역에 위치하는 방식으로 날개 범위를 따라 위치한다는 사실에 의해 달성됩니다.
본 발명의 핵심은 간략한 설명 및 첨부 도면에 의해 예시된다.
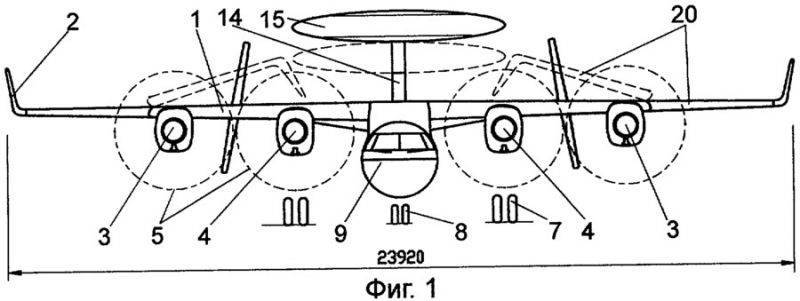
도면 (그림 1-3)에 표시된 갑판 항공기는 DRLO 항공기입니다. 1 팁이 설치된 끝에서 사다리꼴 2 날개가있는 "high-plane"계획에 따라 평면이 만들어지고 항공기의 공기 역학적 품질이 향상되고 수직면에서 작은 각도로 회전하고 범위가 크게 늘어나지 않으면 서 비행 시간 및 범위가 증가합니다. 1 날개 앞쪽에는 외부 3 엔진과 내부 4 엔진 (예 : 5 프로펠러가있는 극장)이 있습니다. 이 유형의 엔진은 연료 소비 측면에서 매우 경제적입니다. 내부의 4 엔진 뒤에는 6 바퀴가 주축을 이루는 7 레이돔이 장착되어 있습니다. 8 비강 륜은 9 동체, 원형 단면으로 후퇴합니다. 이러한 동체의 단면은 높은 고도에서 비행 할 때 기내의 과도한 압력으로 목표물 감지 범위를 증가시키는 데 필요한 하중을 유리하게 감지 할 수 있습니다. 9 동체 상부 꼬리 부분에는 10 엘리베이터가 장착 된 수평 11 경사가 있고 양단에는 12 방향 타원이있는 두 개의 핀 13 수직 깃털이 있습니다.
9 텔레스코픽 파일롯의 14 동체 상단에는 대상 장비를 수용 할 수있는 15 페어링이 있습니다. 1 윙은 기계화되어 있으며 16 트윈 슬롯 플랩, 17 에일러론 걸이, 18 브레이크 플랩 및 19 인터셉터를 포함합니다. 20 윙의 1 콘솔과 2 팁, 에일러론 17는 TKR 격납고의 제한된 크기의 해치를 통해 리프트에서 낮출 때 항공기의 크기를 줄이기 위해, 그리고 갑판과 격납고에서 발자국을 줄이기 위해 회전 선회로 만들어졌습니다 . 9 동체 하부에는 21 이동식 후크가 설치되어 착륙 용 밧줄이 갑판 위의 항공기 착륙시 잡히도록합니다.
연비가 좋은 4 형 TVD 3,4 엔진을 설치하면 추력 대 중량 비율이 증가하여 항공기 이륙 실행 시간에 직접 영향을 미치고 장거리 비행이 가능합니다. 윙 기계화 - 16 플랩 및 호버링 에일러론 17는 5 프로펠러의 블로잉 영역에 위치하므로 날개 양력 (Su)을 추가로 증가시켜 이륙 실행을 현저히 감소시킵니다. 한 대의 엔진이 고장 나면 비행기는 추력의 4 분의 1을 잃지 만 날개가 부는 대칭은 부러져서 힘과 균형이 불균형 해집니다. 윙 리프트의 비대칭 성을 제거하고 비행기의 궤도 및 횡단 채널에서 발생하는 모멘트를 제거하기 위해 자동 평형 시스템이 에일러론, 방향타 및 스포일러의 속도로 인해 실패한 엔진과 대칭 인 날개 단면의 리프트 력을 방해합니다. 밸런싱 손실을 고려하여 날개가 부는 효과의 나머지는 엔진 고장없이 날개를 부는 효과의 대략 50 %입니다. 에일러론 17을 5 프로펠라 송풍 영역에 배치하면 한 대의 엔진이 고장 나면 항공기의 측면 제어 가능성을 유지할 수 있습니다.
이러한 특징은 스프링 보드가 장착 된 TAKR의 데크에서 항공기 이륙의 안전을 보장하고 항공기의 횡단 및지면 제어력을 향상시킵니다.
배치 장소에서 항공기를 이륙하기 전에 발전소의 모든 엔진이 데크에서 시작되고 항공기는 접혀진 콘솔로 시작 위치로 이동합니다. 그런 다음 콘솔과 날개 기계화가 이륙 위치에 설정되고 "이륙"항공기 엔진 모드에서는 항공기가 이륙 할 수 있습니다.
공기 역학적 계산은 4 개의 TVD 엔진을 사용하거나 TV7-117CT를 사용하여 수행되었습니다. 이륙시 한 대의 엔진 고장으로 이륙을 고려한 항공기의 최대 허용 이륙 중량은 28 톤입니다. 400 TAKR 킬로미터에서 멀리 떨어진 높이의 순찰 시간은 적어도 7 시간입니다. 이륙 모드에서 엔진을 작동 시키면 한 엔진이 180-200 미터 범위의 활주로 길이의 갑판에서 항공기를 계속 이탈 할 수 있습니다.
기술 및 경제적 효율성은 TAKR이 MTVD에서 주도하는 항공 모함 그룹의 사용 효율을 높이고 항공 모함 그룹 주변 1000 킬로미터의 반경에서 공기, 표면 및 수중 조건을 밝힐뿐 아니라 PA 항공기를 제어 및 탐색하고 목표물에서 순항 미사일을 발사하는 능력으로 표현됩니다.
제안 된 발명은 항공기에 사용되는 재료의 기존 기술 및 안테나 피더 장치의 현재 개발 수준 및 무선 장비 생산에 따라 구현 될 수 있습니다.
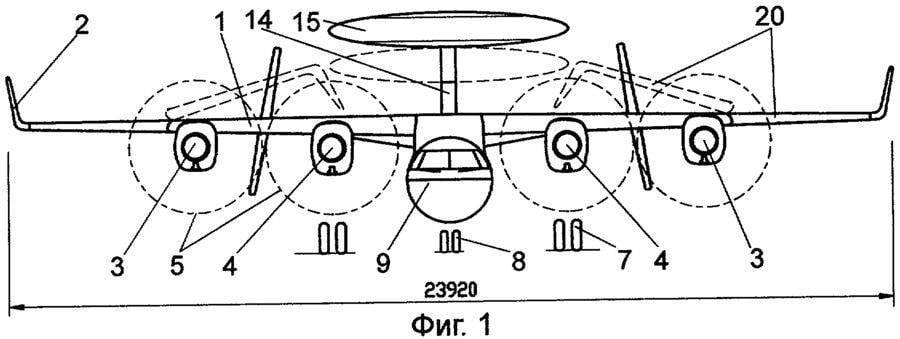
그림에서 1는 항공기의 갑판 전면 투영을 보여줍니다.
본 발명은 항공 공학, 특히 해군 항공에 관한 것으로, 군사 작전의 해상 극장 (MTVD)에서의 다양한 과제를 해결하기 위해 무거운 항공기 캐리어 순양함 (TAKR)과 함께 사용하기위한 것이다. Decker 항공기는 장거리 레이더 순찰 및 유도 (ASDF), 대잠 잠수함 방어 (ASR) 및 기타 작업을 수행 할 수 있습니다.
갑판에서 항공기의 이륙을 보장하기 위해 미국과 세계 다른 국가 [1]의 모든 항공 모함에는 발사기가 장착되어 있습니다. 국내 수송선 기반 항공 (PA)은 발사대가없는 쿠즈 네 소프 (Kuznetsov) 제독 (2) 형 TAKR을 기반으로하므로 전투기 및 공격기와 같은 무거운 추력 항공기 만 발사대가 장착 된 갑판에서 벗어날 수 있습니다. TAKR 데크에서 가능한 최대 활주로는 200 미터를 넘지 않아 이륙 도중 엔진 고장으로 정상적인 이륙과 이륙을 보장해야합니다. 따라서 TAKR에는 위의 것 외의 다른 과제물과 헬리콥터가 부분적으로 다양한 작업을 수행하는 항공기가 없습니다.
아날로그를 위해 데크 전투기 Su-33 [3]을 갑판과 격납고 TAKR "Admiral Kuznetsova"에 따라 채택했습니다. 항공기에는 동체, 휩쓸 날개, 트윈 엔진 제트 추진 시스템, 양 꼬리 지느러미, 섀시 및 랜딩 기어가 포함되어 있습니다. 높은 추력을 가지고, 그는 투석기를 가속시키지 않고 짧은 갑판 TAKR에서 벗어나고 심지어 한 엔진의 고장으로도 계속 이륙 할 수 있습니다.
이 항공기의 단점은 발전소의 상당한 연료 소비와 항공기가 장시간 비행 할 수 없으며, 순찰 및 대잠 작전 수행 능력이 제한된다는 것입니다. 그 이유는 연료 보급이 제한되어 있고 대상을 한두 번 방문하면 파괴 할 수 있기 때문입니다. 제한된 연료 탱크의 크기와 항공기의 이륙 중량에 대한 제한 때문에 연료 용량의 증가는 불가능합니다.
따라서 TACR의 갑판에는 장기간 비행 중이며 RLDN 또는 PLO의 기능을 수행 할 수있는 항공기가 없습니다.
프로토 타입으로 가장 근접한 기술 솔루션으로는 미국 HUKAY E-2D [4] 항공기 동체가 포함되어 있습니다. 항공기 동체, 갑판에 날개를 접은 상태, 4의 용골 꼬리 어셈블리, 2 엔진 동력 장치, 이동식 안테나 레이돔 철탑, 랜딩 기어 및 랜딩 기어가 장착되어 있습니다. 항공기의 날개와 기계화는 부분적으로 송풍 나사 부분에 있습니다. 이 비행기는 갑판에서 출발하여 투석기가 장착되어 있으며, 비행기는 투석기 앞쪽 착륙 장치 지지대에 걸려 있고, 엔진이 이륙 모드로 시작하면 투석기가 비행기를 가속시켜이 엔진이 고장 나도 항공기는 한 엔진에서 계속 비행 할 수 있습니다.
투석기를 발사하지 않은 채 표시된 프로토 타입은 항공 모함의 갑판에서 벗어날 수 없습니다.
투석기를 시작하는 것은 부피가 크고 값 비싸며 복잡한 장치로 일정한 성능이 필요합니다. 이륙 단계에서 단 하나의 실패 사례가 발생해도 비행기 추락 사고가 발생합니다. 더욱이 러시아의 기존 TAKR에는 그러한 투석기가 장착되어 있지 않으며 그러한 투석기를 장착 할 가능성조차 없습니다.
본 발명의 과제는 항공기의 안전과 신뢰성을 확보하고, 경제적 인 연료 소비를 갖는 비행기로 PA 함대를 보충하고, 장시간 동안 XRDNS 또는 PLO의 작업을 수행 할 수 있고, 시동 투석기가없는 발판을 갖춘 갑판에서 이륙 할 수있는 항공기의 이륙 거리를 200m로 감소시키는 것이다. 추력 추진 엔진.
기술적 인 결과는 갑판 항공기가 4 개의 연비가 좋은 TVD 유형의 엔진을 장착하여 날개와 그 기계화 및 에일러론이 프로펠러 영역에 위치하는 방식으로 날개 범위를 따라 위치한다는 사실에 의해 달성됩니다.
본 발명의 핵심은 간략한 설명 및 첨부 도면에 의해 예시된다.
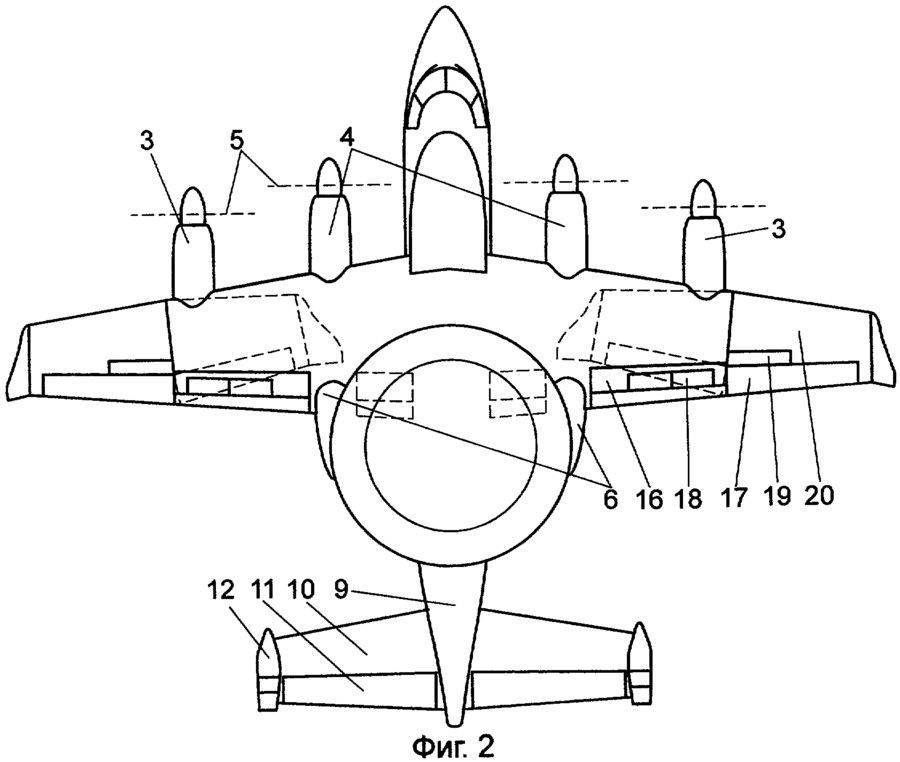
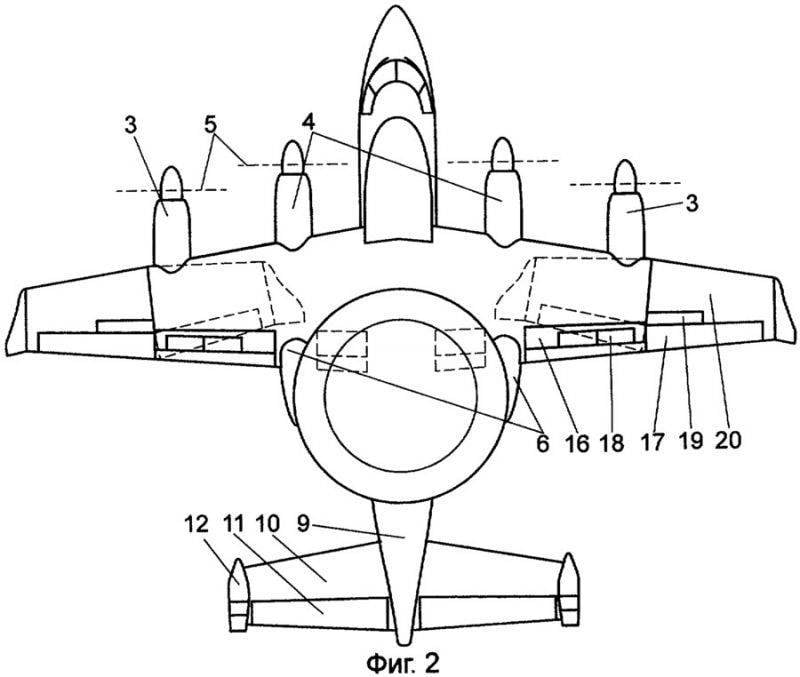
그림에서 2는 항공기의 계획된 투영을 보여줍니다.
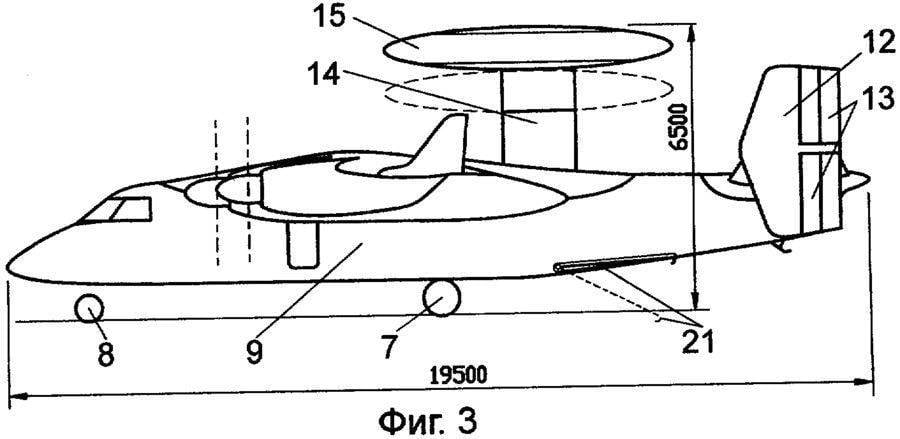
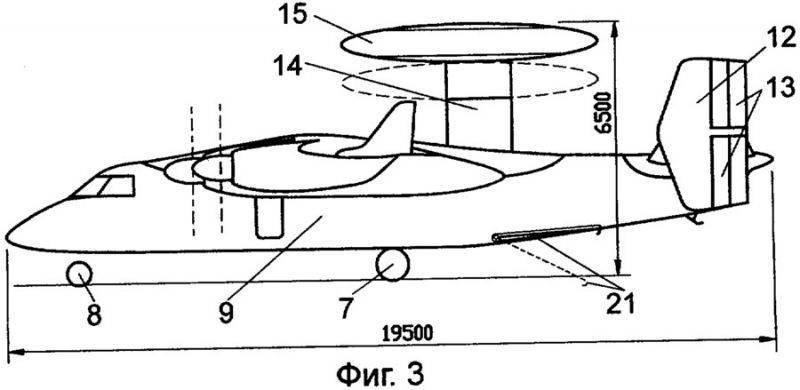
fig.3는 프로파일 프로젝션을 보여줍니다.
도면 (그림 1-3)에 표시된 갑판 항공기는 DRLO 항공기입니다. 1 팁이 설치된 끝에서 사다리꼴 2 날개가있는 "high-plane"계획에 따라 평면이 만들어지고 항공기의 공기 역학적 품질이 향상되고 수직면에서 작은 각도로 회전하고 범위가 크게 늘어나지 않으면 서 비행 시간 및 범위가 증가합니다. 1 날개 앞쪽에는 외부 3 엔진과 내부 4 엔진 (예 : 5 프로펠러가있는 극장)이 있습니다. 이 유형의 엔진은 연료 소비 측면에서 매우 경제적입니다. 내부의 4 엔진 뒤에는 6 바퀴가 주축을 이루는 7 레이돔이 장착되어 있습니다. 8 비강 륜은 9 동체, 원형 단면으로 후퇴합니다. 이러한 동체의 단면은 높은 고도에서 비행 할 때 기내의 과도한 압력으로 목표물 감지 범위를 증가시키는 데 필요한 하중을 유리하게 감지 할 수 있습니다. 9 동체 상부 꼬리 부분에는 10 엘리베이터가 장착 된 수평 11 경사가 있고 양단에는 12 방향 타원이있는 두 개의 핀 13 수직 깃털이 있습니다.
9 텔레스코픽 파일롯의 14 동체 상단에는 대상 장비를 수용 할 수있는 15 페어링이 있습니다. 1 윙은 기계화되어 있으며 16 트윈 슬롯 플랩, 17 에일러론 걸이, 18 브레이크 플랩 및 19 인터셉터를 포함합니다. 20 윙의 1 콘솔과 2 팁, 에일러론 17는 TKR 격납고의 제한된 크기의 해치를 통해 리프트에서 낮출 때 항공기의 크기를 줄이기 위해, 그리고 갑판과 격납고에서 발자국을 줄이기 위해 회전 선회로 만들어졌습니다 . 9 동체 하부에는 21 이동식 후크가 설치되어 착륙 용 밧줄이 갑판 위의 항공기 착륙시 잡히도록합니다.
연비가 좋은 4 형 TVD 3,4 엔진을 설치하면 추력 대 중량 비율이 증가하여 항공기 이륙 실행 시간에 직접 영향을 미치고 장거리 비행이 가능합니다. 윙 기계화 - 16 플랩 및 호버링 에일러론 17는 5 프로펠러의 블로잉 영역에 위치하므로 날개 양력 (Su)을 추가로 증가시켜 이륙 실행을 현저히 감소시킵니다. 한 대의 엔진이 고장 나면 비행기는 추력의 4 분의 1을 잃지 만 날개가 부는 대칭은 부러져서 힘과 균형이 불균형 해집니다. 윙 리프트의 비대칭 성을 제거하고 비행기의 궤도 및 횡단 채널에서 발생하는 모멘트를 제거하기 위해 자동 평형 시스템이 에일러론, 방향타 및 스포일러의 속도로 인해 실패한 엔진과 대칭 인 날개 단면의 리프트 력을 방해합니다. 밸런싱 손실을 고려하여 날개가 부는 효과의 나머지는 엔진 고장없이 날개를 부는 효과의 대략 50 %입니다. 에일러론 17을 5 프로펠라 송풍 영역에 배치하면 한 대의 엔진이 고장 나면 항공기의 측면 제어 가능성을 유지할 수 있습니다.
이러한 특징은 스프링 보드가 장착 된 TAKR의 데크에서 항공기 이륙의 안전을 보장하고 항공기의 횡단 및지면 제어력을 향상시킵니다.
배치 장소에서 항공기를 이륙하기 전에 발전소의 모든 엔진이 데크에서 시작되고 항공기는 접혀진 콘솔로 시작 위치로 이동합니다. 그런 다음 콘솔과 날개 기계화가 이륙 위치에 설정되고 "이륙"항공기 엔진 모드에서는 항공기가 이륙 할 수 있습니다.
공기 역학적 계산은 4 개의 TVD 엔진을 사용하거나 TV7-117CT를 사용하여 수행되었습니다. 이륙시 한 대의 엔진 고장으로 이륙을 고려한 항공기의 최대 허용 이륙 중량은 28 톤입니다. 400 TAKR 킬로미터에서 멀리 떨어진 높이의 순찰 시간은 적어도 7 시간입니다. 이륙 모드에서 엔진을 작동 시키면 한 엔진이 180-200 미터 범위의 활주로 길이의 갑판에서 항공기를 계속 이탈 할 수 있습니다.
기술 및 경제적 효율성은 TAKR이 MTVD에서 주도하는 항공 모함 그룹의 사용 효율을 높이고 항공 모함 그룹 주변 1000 킬로미터의 반경에서 공기, 표면 및 수중 조건을 밝힐뿐 아니라 PA 항공기를 제어 및 탐색하고 목표물에서 순항 미사일을 발사하는 능력으로 표현됩니다.
제안 된 발명은 항공기에 사용되는 재료의 기존 기술 및 안테나 피더 장치의 현재 개발 수준 및 무선 장비 생산에 따라 구현 될 수 있습니다.
정보