공군 항공기를 사용하지 않고 저공 비행 목표물에 대한 방공 시스템의 작업 보장
지구 표면의 곡률과 지형의 고르지 않은 지형은 저공 비행 항공 폭행 차량 (EIS)을 감지하고 파괴하는 지상 및 우주선 방어 미사일 시스템의 능력을 심각하게 제한합니다. 저공 비행 목표에서 대공 미사일 발사 가능성을 효과적으로 어떻게 확인할 수 있습니까?
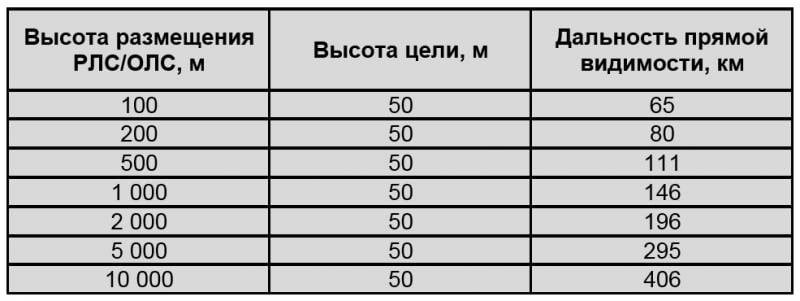
하나의 옵션은 리프팅 마스트 장치 (PMU)에 레이더를 배치하는 것입니다. 15 미터 고도에 레이더를 배치하면 표면 위의 50 미터 고도에서 이동하는 항공기 (LA)의 가시 범위는 41 km가됩니다. PMU의 높이를 50 미터로 높이면 이론 가시성 범위가 13 km (54 km까지) 증가하지만 이러한 장비의 복잡성과 부피는 훨씬 더 커질 것입니다.
Pantsir-SM 유형의 단거리 방공 시스템에서는 매우 정상적인 것처럼 보일 수 있습니다. 그러나 실제로는 고르지 않은 지형, 숲, 건물 및 기타 자연 및 인공 장애물로 인해이 값이 여러 번 줄어 듭니다.
저공 비행 목표의 탐지를 보장하기 위해 레이더를 올리는 데 필요한 최소 높이는 얼마입니까?
지형의 불규칙성을 보완하기 위해 검출 수단을 올려야하는 높이는 각각의 경우마다 다를 수있다. 대부분의 경우, 100-200 km 범위 내에서 러시아의 편평한 지역의 고도 차이는 100-200 미터 이하입니다. 산악 지역에서는 차이가 훨씬 클 수 있으며 특정 값을 지정하기가 어렵습니다.
일반적으로 근거리 SAM 시스템 (최대 40-50 km)의 경우 100 미터의 고르지 않은 지형을 보정하는 데 필요한 높이를 사용할 수 있으며 중거리 SAM 시스템 (50-150km까지)의 경우 고르지 않은 지형을 보정하는 데 필요한 높이가 200 미터가됩니다.
따라서 근거리 SAM 시스템에서 저공 비행 목표를 탐지하기위한 레이더 배치의 최소 높이는 중거리 SAM 시스템의 경우 200 미터에 대한 700 미터입니다. 지평선 장거리 대공 방어 시스템을 확보하기위한 레이더의 높이는 DRLO 항공기의 고도와 유사해야하며, 10 000 m의 순서와 같아야합니다.이 경우 지형은 상당히 작은 값을 나타냅니다.
이러한 높이는 PMU의 사용을 불가능하게 만들지 만, "수평선 너머를 바라 보는"다른 여러 가지 방법이 있습니다.
그러한 방법 중 하나는 풍선을 사용하는 것입니다. 미국에서는 프로젝트가 JLENS로 구현됩니다. 이 프로젝트는 저공 비행 순항 미사일을 탐지하기 위해 미국의 특정 지점에 고정 된 항공기에 레이더 및 광학 정찰 장비를 배치하는 것을 제공합니다. 풍선의 높이는 3 - 4,5 km이며, 적재 중량은 약 3 톤입니다. 공중 표적의 탐지 범위는 550 킬로미터의 순서이며 225 km의 지상 표적이어야한다. 탐지 외에도, JLENS 풍선은 지대공 미사일에 대한 지평선 표적 지정을 제공해야합니다. 풍선을 위치 및 데이터 교환에 사용하기 위해 전원 공급 케이블과 광섬유 데이터 전송 케이블이 포함 된 케이블을 탄소 브레이드에 사용합니다.

우리가 고려하고있는 과제의 틀 내에서이 프로젝트는 몇 가지 단점이 있습니다. 풍선은 차량에 의한 영구적 인 이동에는 그리 편리하지 않으며 가능하다면 특정 지점에 묶여 야합니다. 이는 이동식 방공 시스템으로 위치를 변경할 가능성을 배제하고 받아 들일 수 없습니다. 또한, 풍선의 거대한 크기 (70 미터를 초과하는 길이)는 이론상 강한 돌발 바람에서의 작동을 방해 할 수 있습니다.
다른 한편으로는, 개념 자체는 확실히 유망하다. 항공기 레이더에 탑재 된 레이더는 대륙간 탄도 미사일 (ICBM) 광산, 잠수함 기지, 탄도 미사일 캐리어, 전략 폭격기의 비행장, 원자력 발전소 및 기타 국가의 군대 및 인프라의 중요한 요소와 같이 저공 비행 EHV에서 정지 된 물체를 보호 할 수 있습니다. .
따라서 aerostats가 방공망을 지평선 너머로 타격 할 가능성이있는 대공 방어 시스템을 제공하는 최적의 수단이 아니더라도 저속 비행하는 적의 EHV에 의한 갑작스런 공격으로부터 특히 중요한 정지 물체를 감추는 데 중요한 역할을 할 수 있습니다. 그들의 주요 이점은 상당한 연료 비용과 전기 비용없이 공기 중에 준 연속적으로 체류 할 수 있다는 것입니다.
러시아에서는 그러한 풍선이 RosAeroSystems에 의해 개발되었습니다. 특히, 다량의 묶인 풍선 "푸마 (PUMA)"를 고려하는 것이 가능합니다. Puma 풍선은 착륙하지 않고 5 일 동안 고도에서 30 km까지 24 시간 내내 레이더 감시를위한 레이더 캐리어로 설계되었습니다.
목표물의 탐지 및 추적에 대한 예상 반경은 300-350 km입니다. 풍선은 46 m / s까지의 허리케인 바람과 직접적인 낙뢰를 견뎌야합니다. 이 풍선은 상승, 하강, 주차시 케이블 로프에 의해 고정되어 있으며 번개 및 정전기는 물론 40 kW까지의 전력으로 탑재 된 시스템 및 탑재 장치에 전원을 공급합니다. PUMA 풍선의 탑재량은 최대 2250 kg입니다.

분명히, 러시아 군대는이 방향으로 움직이고 있습니다.
Almaz-Antey에 대한 우려의 경우 풍선과 비행선은 공습의 위협에 대해 경고 할 수있을뿐만 아니라 식별 된 목표물에 ARGSN (Active Radar Homing Head)이 장착 된 직접 대공 유도 미사일 (SAM)도 필요합니다.
방공 시스템으로 돌아 갑시다. 우선 우리는 레이더를 200와 700 미터 높이로 올려야하는 단거리 및 중거리 방공 시스템을 고려할 것입니다.
2018 초기에 Boeing은 전기 무인 쿼드 코프 (unmanned quadcopter)화물 항공기 프로토 타입을 소개했습니다. 이 UAV는 차세대화물 및 여객기를 만드는 데 필요한 기술을 테스트하고 디버깅하기 위해 설계되었습니다. 숙련 된 UAV 4,57 미터의 길이, 5,49 미터의 너비, 1,22 미터의 높이, 건전지의 무게를 포함한 무게는 339 킬로그램입니다. 최대 하중 - 226 kg. 디자인은 8 개의 로터가있는 4 개의 전기 모터를 포함합니다.
보잉 사의 쿼드 코프 프리젠 테이션
Electric quadcopters-UAV는 육지 및 해상 방공 미사일 시스템의 저공 비행 EAS를 탐지하는 효과적인 솔루션이 될 수 있습니다.
Electric quadcopter-UAV는 차량 운반기에 설치되어야하며 UAV에 전기를 공급하기 위해 DGU (디젤 발전기 세트)도 설치해야합니다. 불행히도, 숙련 된 쿼드 코프의 전기 모터의 파워, 배터리 충전 시간 및 비행 시간은 현재 알려지지 않았습니다.
다음 두 가지 옵션을 고려할 수 있습니다.
- 첫 번째 변종에는 장거리 비행을 유지하기 위해 필요한 재충전 배터리가없고, 캐리어 차량으로부터 전원 공급이 제공되며, UAV의 비상 착륙을위한 백업 배터리가 아주 적습니다. 아마도이 옵션은 최적으로 간주 될 수 있습니다.
- quadcopter에 필요한 전력을 공급하는 데 필요한 케이블의 무게가 너무 큰 경우 두 번째 옵션을 사용할 수 있습니다.이 경우 고속 충전 기능이있는 배터리 또는 수퍼 커패시터 (ionistor)를 쿼드 코터에 배치해야합니다.
4 개의 단거리 대공 방어 시스템을 위해 공중에 계속 머 무르려면 UAV가있는 최소 2 개의 운반 차량이 필요합니다. UAV가 대기 중에있는 시간은 디젤 발전기 세트의 연료 가용 량에 의해서만 제한 될 것입니다.
전기 쿼드 코프 대신 UAV를 가솔린 또는 디젤 피스톤 엔진을 기반으로 구현할 수 있습니다. 러시아에서는 SKYF Technology가 SKYF 수직 이륙 및 UAV 상륙을 고객에게 제공하는 솔루션 개발 및 생산에 종사하고 있습니다. 현재 SKYF UAV 탑재량은 250 킬로그램이며 400 킬로그램까지 증가 할 것으로 예상됩니다. 3000 미터까지의 UAV 비행 높이.

비행 시연 SKYF UAV
프리젠 테이션 SKYF UAV
Horizont은 Horizon Air S-100 헬리콥터 유형 UAV에서 오스트리아의 Schiebel Camcopter S-100를 기반으로하는 순환 검토 레이더로 발표되었습니다. 이 UAV 레이더 순환 검토에 탑재 된 "Hummingbird"는 동체 하단에 설치되어 모스크바의 "Radio Physics 연구소"와 함께 개발 중입니다. 레이다 장비의 총 질량은 6,5 kg보다 커서는 안되며 원형보기 모드 (UAV 정지)에서 필요한 범위는 200 km 이상인 합성 개구의 모드에서 20 km 이상이어야합니다.
이 UAV의 탑재량은 수용할만한 특성을 가진 레이더를 수용하기에는 너무 작습니다 (35 kg). 이것은 개념으로서 흥미로울 수 있습니다. 공중에서의 연속 시간 6.

주어진 쿼드 코퍼스 UAV의 예는 상대적으로 적당한 페이로드를 가지고 있기 때문에 레이더 배치에 직접 관련 될 수는 없지만 설계가 활발하게 개발되고 개선 될 것이라는 데는 의심의 여지가 없습니다. 우선, 그것은 전기 quadrocopters-UAVs와 관련이 있습니다.
쿼드 코프 (quadcopter) 형 UAV 또는 헬기 형 UAV-DRLO 유형의 주요 요구 사항은 높은 신뢰성과 대기 중 장기간 체류가 가능해야하며 지정된 비행 성능 (LTH)은 물론 높은 작동 수명과 낮은 비행 시간을 보장해야합니다.
장거리 UAV의 경우, 수직 이륙 및 착륙 UAV는 더 이상 효과적이고 충분한 정찰 도구가 아니며, 400 km 정도의 거리를 달성하려면 10 000 미터를 초과해야합니다.
아마도 장거리 대공 미사일 시스템을위한 비행 레이더로서 장거리, 항공기 유형, 중형 또는 장거리의 UAV를 사용할 수 있습니다.
유망주 후보 중 한명 무인 비행기-DRLO는 이륙중량 5톤, 탑재하중 1~2톤의 알테어 UAV가 될 수 있습니다. 이 UAV는 Transas 회사와 함께 Sokol Design Bureau(Kazan)의 Altius-M 연구 프로젝트의 일환으로 제작되고 있습니다. 비행 시간은 최대 48시간이어야 하며 비행 범위는 10km입니다. 000년 알테어 UAV 프로그램은 토목의 우랄 공장으로 이전되었습니다. 항공"(UZGA). Altair UAV 비행 시험은 2019 년에 시작해야합니다.

이 유형의 장치는 다른 국가에서 개발되고 있습니다. 특히 중국 기업인 CETC는 JY-300 UAV를 개발 중입니다. 중간 크기의 장치는 컨 포멀 안테나의 캐리어가되어야하며 AWED 무인 차량으로 사용되어야합니다. 예비 자료에 따르면 JY-300 UAV는 약 1300 kg의 이륙 중량을 지니고 400 kg의 탑재 물을 운반 할 수 있습니다. 그는 최대 12 킬로미터의 고도에서 7,6 시간까지 비행 할 수 있습니다. 이 무인 항공기의 설계에 내장 된 레이더는 장거리에서 항공 및 해상 표적을 탐지 할 수 있어야합니다.

러시아 중형 및 대형 UAV는 소형, 강력하고 경제적 인 국내 엔진 부족, 현대 항공 전자 공학의 부재 등 많은 문제로 어려움을 겪고 있습니다. 가장 중요한 문제 중 하나는 UAV를 관리하고 근거 지점에서 멀리 떨어져있는 지능형 정보를 수신 할 수 있도록 전역 도달 범위가있는 위성 데이터 전송의 고속 채널이 부족하다는 것입니다.
비행 시간이 긴 DRLO 무인기의 사용은 그러한 채널의 존재를 요구하지 않는다. 일반적으로 장거리 무인 정찰기의 장거리 방공 시스템의 작동 방식은 다음과 같습니다.
장거리 UAV DRLO는 비행장에서 벗어나 에쉴론 방공망의 위치에서 순찰 구역으로 들어갑니다. 모든 정보는 장거리 방공 시스템 운영자에게 전달되며, 또한 지휘 통제 지점을 통해 통합 방탄 시스템의 일부인 다른 방공 시스템 운영자에게 제공됩니다. UAV의 비행은 주로 주어진 궤도에서 자동 모드로 수행되어야합니다. 하나의 장거리 방공 시스템에는 두 개의 DRLO UAV가 포함되어야합니다. 이 경우, 그들은 비행장의 거리에 따라 36-48 시간의 지속 기간 동안 대공 미사일 시스템의 위치를 교대로 바꿀 수있다.
장거리 UAV DRLO의 요구 사항은 단거리 및 중거리 대공 미사일 시스템의 UAV와 동일하며 높은 작동 수명과 낮은 비행 시간 비용이 필요합니다.
문제는 발생할 수 있습니다 : 기사의 제목은 공군 항공기를 사용하지 않고 저공 비행 목표물에 대한 방공 시스템의 작업을 말하며, 비행 기간이 긴 UAV는 분명히 항공을 나타냅니다. 여기서 문제는 부서 소속에 있습니다. 미국에서는 존슨 맥코넬 (Johnson-McConnell)과 육군과 공군의 합의에 따라 헬리콥터가 미 공군에 속하지 않고 직접적으로 미 육군에 복종하며 이익을 위해 행동합니다 (미국에서 항공기를 군대와 공군으로 나누는 것은 잘 쓰여 있습니다 여기에). 우리의 경우, UAV가 특정 대공 미사일 시스템을 언급한다는 사실은 다른 목적으로 공군력을 사용하는 것을 허용하지 않습니다.
쿼드 로코터 유형 DRLO UAV와 장기간 DFLO UAV를 사용하면 밀도가 높은 레이더 지형 범위를 만들고 ARGSN 및 IR GOS를 최대 거리로 사용하여 미사일을 목표물로 타겟팅 할 수 있습니다.
아마도 단거리 대공 방어 시스템 두 대가 quadrocopter-type AWAC UAV가 장착 된 자동차 1 대 또는 4 대의 대공 방어 시스템에 2 대가 있어야합니다. 중거리 방공 시스템에는 UAV 형 쿼트로 코퍼 (quadrocopter) 형 차량 2 대가 포함되어야합니다. 두 대의 장거리 무인 항공기 무인 항공기는 장거리 대공 방어 시스템과 관련이 있어야합니다.
위험 기간이나 적대 행위가 시작될 때, 장거리 비행 무인 정찰기는 대공 미사일 시스템의 위치에 대해 순찰을 계속해야합니다. 단거리 및 중거리 대공 미사일 시스템의 쿼드 로코터 형 무인 항공기는 즉각적인 발사 준비를 위해 운송 수단 차량에 있어야합니다. 공중 위협이 감지되면 쿼드 로코 터 유형 UAV가 몇 분 내에 시작되어야합니다.
UAV 자체의 비용과 비행 시간은 유인 항공기 및 헬리콥터 비용보다 전통적으로 현저히 낮아 경제적으로 매력적입니다. 기술적으로, 제안 된 개념은 극복 할 수없는 문제도 포함하고 있지 않습니다.
중요도가 높은 정지 물체의 경우 AEW 풍선을 사용할 수 있습니다. 공중 조기 경보기구를 갖춘 방공 시설의 경우, 장기간의 무인 항공기는 필요하지 않으며 장거리 대공 미사일 시스템에서 제외되거나 예비 정찰 및 표적 지정 도구로서 출발 준비가 된 비행장에있을 수 있습니다.
이전에는 지상 기반 방공 시스템을 위해 UAV를 사용하는 것이 고려되었습니다. 그러나 해군 함정의 항공 방위를 위해 비행 시간이 긴 쿼드 콥터 형 UAV와 UAV를 사용하는 것이 더 중요 할 것입니다. 함대 (네이비). 항공 모함이없고 따라서 AWACS 항공기가 있다는 사실을 감안할 때 현대 러시아 선박은 비행 방공 목표물의 탐지 범위에 대한 물리적 한계로 인해 항공 방어에 관계없이 항공 공격으로부터 제대로 보호되지 않습니다.
러시아 해군의 배에 quadrocopter 유형 UAV를 사용하면 저공 비행 목표의 파괴 라인을 상당히 밀어 낼 수 있습니다. 그리고 해군 함대가 위치한 지역에 긴 지속 시간과 비행 범위를 가진 UAV를 보내면 적군을 정찰하고 미사일에 표적을 지정하는 데 추가 기능을 제공 할 것입니다 무기에 장거리.

특히 해군의 이익을 위해 AWACS의 풍선 및 비행선 사용을 배제 할 수 없습니다. 역사의 러시아 함대가 풍선을 사용하는 예가 있습니다.
장거리에서 저공 비행 목표물을 공격 할 가능성이없는 지상 및 지상 방어력이 붕괴됩니다.
단거리 및 중거리 SAM 시스템의 이익을 위해이 문제를 해결하려면 캐리어 차량에서 케이블을 통해 전원 공급 장치가있는 쿼트로 코퍼 유형 DRLO UAV를 만드는 것이 필요합니다.
장거리 방공 시스템의 경우, 장기간 UAV 무인기의 개발을 강화할 필요가있다.
중요도가 높은 정지 물체의 경우 AEW 풍선을 사용할 수 있습니다.
위에서 언급 한 모든 시스템 (quadrocopter type 무인 항공기, 장시간 무인 항공기, 조기 경보 무인 항공기)은 지상 방공 시스템뿐만 아니라 러시아 해군의 선박의 효율성과 생존력을 향상시키는 데 매우 중요합니다.
높게 올라라.
하나의 옵션은 리프팅 마스트 장치 (PMU)에 레이더를 배치하는 것입니다. 15 미터 고도에 레이더를 배치하면 표면 위의 50 미터 고도에서 이동하는 항공기 (LA)의 가시 범위는 41 km가됩니다. PMU의 높이를 50 미터로 높이면 이론 가시성 범위가 13 km (54 km까지) 증가하지만 이러한 장비의 복잡성과 부피는 훨씬 더 커질 것입니다.
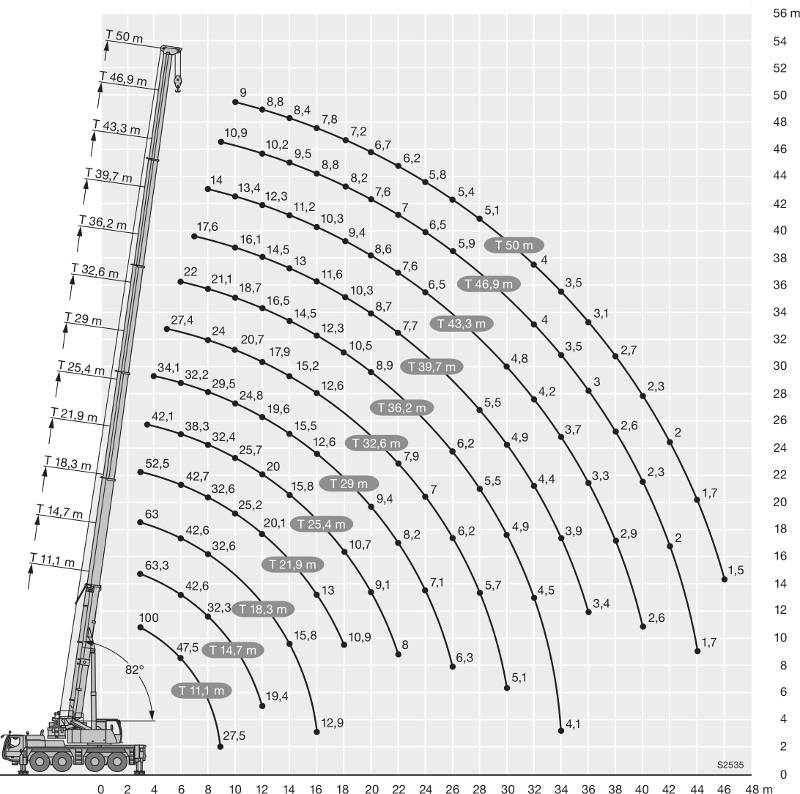
현대식 트럭 크레인의 성능은 9 미터의 높이까지 50 톤의 하중을 들어 올릴 수있게하여 비슷한 비행장 목표물을 탐지하는 PMU에 배치 할 수 있습니다
Pantsir-SM 유형의 단거리 방공 시스템에서는 매우 정상적인 것처럼 보일 수 있습니다. 그러나 실제로는 고르지 않은 지형, 숲, 건물 및 기타 자연 및 인공 장애물로 인해이 값이 여러 번 줄어 듭니다.
저공 비행 목표의 탐지를 보장하기 위해 레이더를 올리는 데 필요한 최소 높이는 얼마입니까?
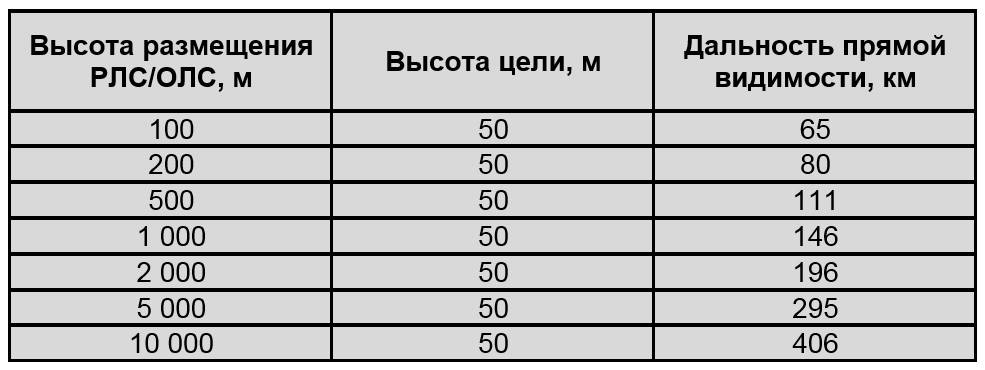
지형을 제외한 탐지 수단 배치의 높이에 따른 직접 시야 범위
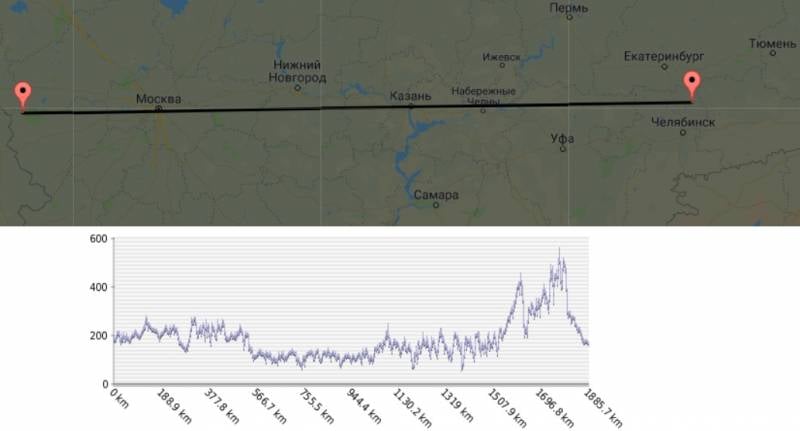
지형의 불규칙성을 보완하기 위해 검출 수단을 올려야하는 높이는 각각의 경우마다 다를 수있다. 대부분의 경우, 100-200 km 범위 내에서 러시아의 편평한 지역의 고도 차이는 100-200 미터 이하입니다. 산악 지역에서는 차이가 훨씬 클 수 있으며 특정 값을 지정하기가 어렵습니다.
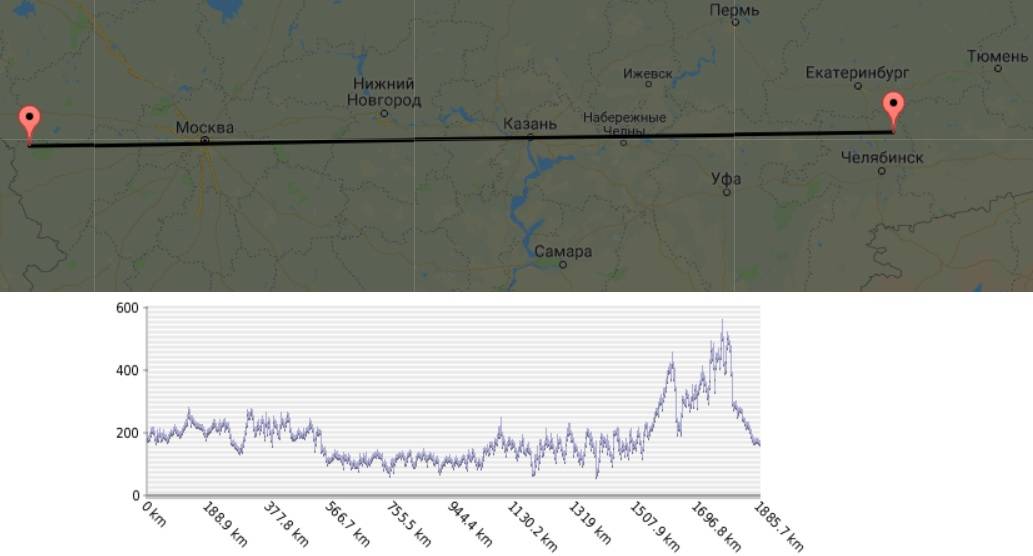
고도 차이 프로파일
일반적으로 근거리 SAM 시스템 (최대 40-50 km)의 경우 100 미터의 고르지 않은 지형을 보정하는 데 필요한 높이를 사용할 수 있으며 중거리 SAM 시스템 (50-150km까지)의 경우 고르지 않은 지형을 보정하는 데 필요한 높이가 200 미터가됩니다.
따라서 근거리 SAM 시스템에서 저공 비행 목표를 탐지하기위한 레이더 배치의 최소 높이는 중거리 SAM 시스템의 경우 200 미터에 대한 700 미터입니다. 지평선 장거리 대공 방어 시스템을 확보하기위한 레이더의 높이는 DRLO 항공기의 고도와 유사해야하며, 10 000 m의 순서와 같아야합니다.이 경우 지형은 상당히 작은 값을 나타냅니다.
이러한 높이는 PMU의 사용을 불가능하게 만들지 만, "수평선 너머를 바라 보는"다른 여러 가지 방법이 있습니다.
비행선 레이더
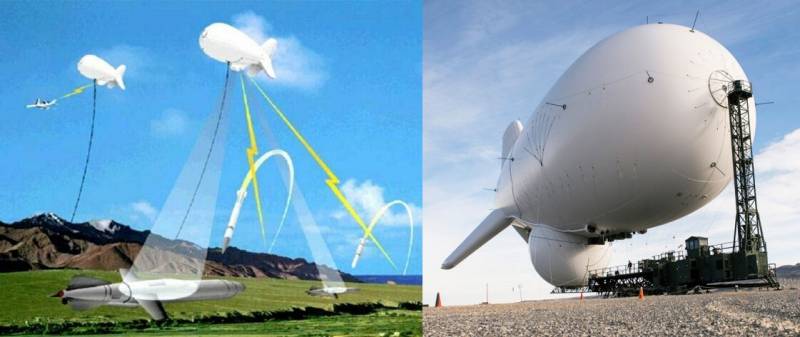
그러한 방법 중 하나는 풍선을 사용하는 것입니다. 미국에서는 프로젝트가 JLENS로 구현됩니다. 이 프로젝트는 저공 비행 순항 미사일을 탐지하기 위해 미국의 특정 지점에 고정 된 항공기에 레이더 및 광학 정찰 장비를 배치하는 것을 제공합니다. 풍선의 높이는 3 - 4,5 km이며, 적재 중량은 약 3 톤입니다. 공중 표적의 탐지 범위는 550 킬로미터의 순서이며 225 km의 지상 표적이어야한다. 탐지 외에도, JLENS 풍선은 지대공 미사일에 대한 지평선 표적 지정을 제공해야합니다. 풍선을 위치 및 데이터 교환에 사용하기 위해 전원 공급 케이블과 광섬유 데이터 전송 케이블이 포함 된 케이블을 탄소 브레이드에 사용합니다.
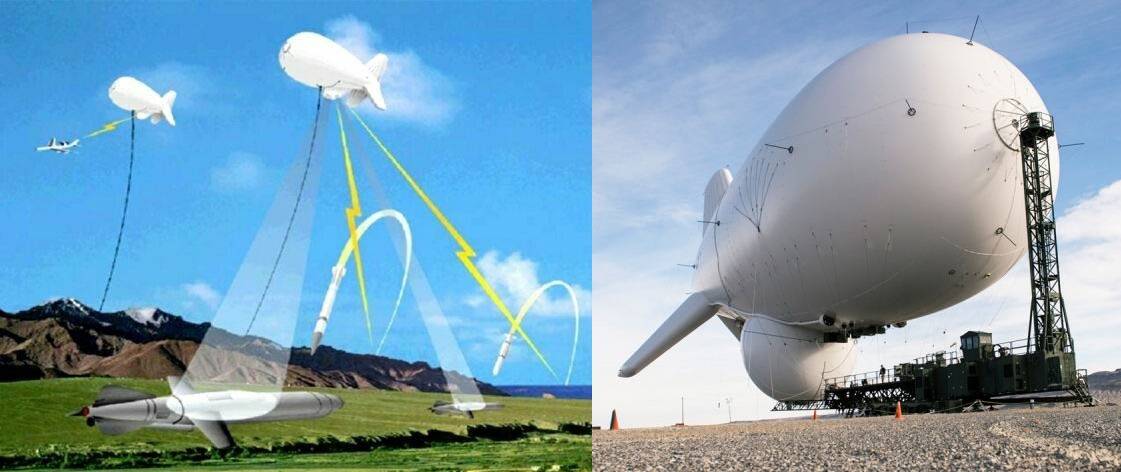
운영 원칙과 프로젝트 JLENS의 풍선

탄소 섬유 프리폼을 직조하는 기계는 또한 고강도 케이블을위한 재킷을 만드는데 사용될 수 있습니다.
우리가 고려하고있는 과제의 틀 내에서이 프로젝트는 몇 가지 단점이 있습니다. 풍선은 차량에 의한 영구적 인 이동에는 그리 편리하지 않으며 가능하다면 특정 지점에 묶여 야합니다. 이는 이동식 방공 시스템으로 위치를 변경할 가능성을 배제하고 받아 들일 수 없습니다. 또한, 풍선의 거대한 크기 (70 미터를 초과하는 길이)는 이론상 강한 돌발 바람에서의 작동을 방해 할 수 있습니다.
다른 한편으로는, 개념 자체는 확실히 유망하다. 항공기 레이더에 탑재 된 레이더는 대륙간 탄도 미사일 (ICBM) 광산, 잠수함 기지, 탄도 미사일 캐리어, 전략 폭격기의 비행장, 원자력 발전소 및 기타 국가의 군대 및 인프라의 중요한 요소와 같이 저공 비행 EHV에서 정지 된 물체를 보호 할 수 있습니다. .
따라서 aerostats가 방공망을 지평선 너머로 타격 할 가능성이있는 대공 방어 시스템을 제공하는 최적의 수단이 아니더라도 저속 비행하는 적의 EHV에 의한 갑작스런 공격으로부터 특히 중요한 정지 물체를 감추는 데 중요한 역할을 할 수 있습니다. 그들의 주요 이점은 상당한 연료 비용과 전기 비용없이 공기 중에 준 연속적으로 체류 할 수 있다는 것입니다.
러시아에서는 그러한 풍선이 RosAeroSystems에 의해 개발되었습니다. 특히, 다량의 묶인 풍선 "푸마 (PUMA)"를 고려하는 것이 가능합니다. Puma 풍선은 착륙하지 않고 5 일 동안 고도에서 30 km까지 24 시간 내내 레이더 감시를위한 레이더 캐리어로 설계되었습니다.
목표물의 탐지 및 추적에 대한 예상 반경은 300-350 km입니다. 풍선은 46 m / s까지의 허리케인 바람과 직접적인 낙뢰를 견뎌야합니다. 이 풍선은 상승, 하강, 주차시 케이블 로프에 의해 고정되어 있으며 번개 및 정전기는 물론 40 kW까지의 전력으로 탑재 된 시스템 및 탑재 장치에 전원을 공급합니다. PUMA 풍선의 탑재량은 최대 2250 kg입니다.
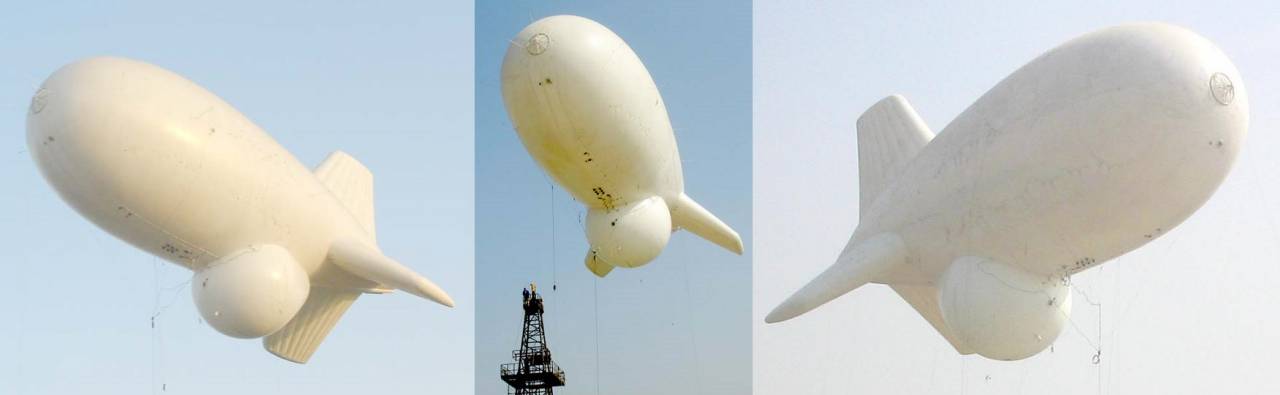
대량의 첨부 된 풍선 "푸마"
분명히, 러시아 군대는이 방향으로 움직이고 있습니다.
7 월, 2015, Radioelectronic Technologies Concern (KRET) 블라디미르 미케 페 (Vladimir Mikheev)의 제 1 부 총경리 보좌관은 RIA에 말했다. 뉴스 미국의 미사일 방어 요구를위한 비행선 프로젝트 작업의 시작에 대해 이것은 오늘날 궤도 위성 배치와 지상 기반 레이더 기지의 두 부분으로 구성된 미사일 공격 경보 시스템 (EWS)의 본질적인 요소가 될 수 있습니다.
Almaz-Antey에 대한 우려의 경우 풍선과 비행선은 공습의 위협에 대해 경고 할 수있을뿐만 아니라 식별 된 목표물에 ARGSN (Active Radar Homing Head)이 장착 된 직접 대공 유도 미사일 (SAM)도 필요합니다.
쿼드 콥터 및 기타 무인 항공기 (UAV) 수직 이륙 및 착륙
방공 시스템으로 돌아 갑시다. 우선 우리는 레이더를 200와 700 미터 높이로 올려야하는 단거리 및 중거리 방공 시스템을 고려할 것입니다.
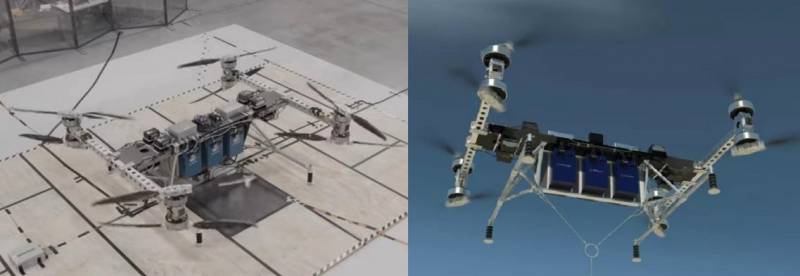
2018 초기에 Boeing은 전기 무인 쿼드 코프 (unmanned quadcopter)화물 항공기 프로토 타입을 소개했습니다. 이 UAV는 차세대화물 및 여객기를 만드는 데 필요한 기술을 테스트하고 디버깅하기 위해 설계되었습니다. 숙련 된 UAV 4,57 미터의 길이, 5,49 미터의 너비, 1,22 미터의 높이, 건전지의 무게를 포함한 무게는 339 킬로그램입니다. 최대 하중 - 226 kg. 디자인은 8 개의 로터가있는 4 개의 전기 모터를 포함합니다.
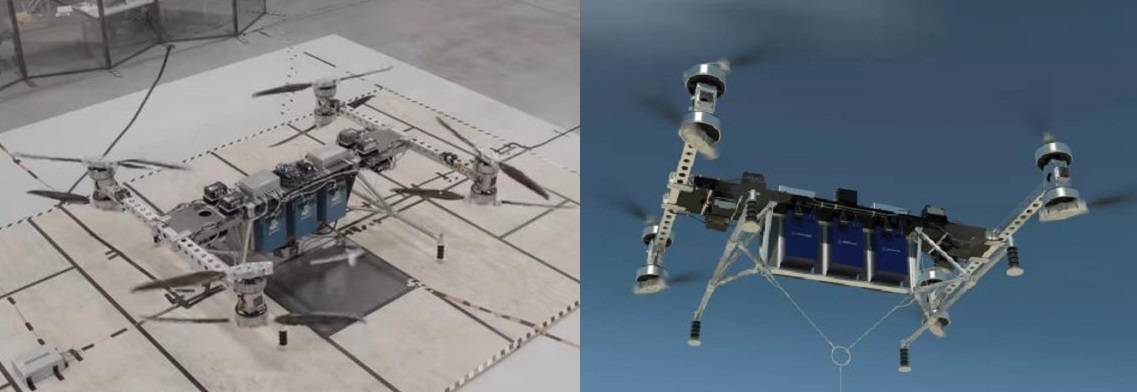
보잉 사의 카고 쿼드 코프터
보잉 사의 쿼드 코프 프리젠 테이션
Electric quadcopters-UAV는 육지 및 해상 방공 미사일 시스템의 저공 비행 EAS를 탐지하는 효과적인 솔루션이 될 수 있습니다.
Electric quadcopter-UAV는 차량 운반기에 설치되어야하며 UAV에 전기를 공급하기 위해 DGU (디젤 발전기 세트)도 설치해야합니다. 불행히도, 숙련 된 쿼드 코프의 전기 모터의 파워, 배터리 충전 시간 및 비행 시간은 현재 알려지지 않았습니다.
다음 두 가지 옵션을 고려할 수 있습니다.
- 첫 번째 변종에는 장거리 비행을 유지하기 위해 필요한 재충전 배터리가없고, 캐리어 차량으로부터 전원 공급이 제공되며, UAV의 비상 착륙을위한 백업 배터리가 아주 적습니다. 아마도이 옵션은 최적으로 간주 될 수 있습니다.
- quadcopter에 필요한 전력을 공급하는 데 필요한 케이블의 무게가 너무 큰 경우 두 번째 옵션을 사용할 수 있습니다.이 경우 고속 충전 기능이있는 배터리 또는 수퍼 커패시터 (ionistor)를 쿼드 코터에 배치해야합니다.
4 개의 단거리 대공 방어 시스템을 위해 공중에 계속 머 무르려면 UAV가있는 최소 2 개의 운반 차량이 필요합니다. UAV가 대기 중에있는 시간은 디젤 발전기 세트의 연료 가용 량에 의해서만 제한 될 것입니다.
전기 쿼드 코프 대신 UAV를 가솔린 또는 디젤 피스톤 엔진을 기반으로 구현할 수 있습니다. 러시아에서는 SKYF Technology가 SKYF 수직 이륙 및 UAV 상륙을 고객에게 제공하는 솔루션 개발 및 생산에 종사하고 있습니다. 현재 SKYF UAV 탑재량은 250 킬로그램이며 400 킬로그램까지 증가 할 것으로 예상됩니다. 3000 미터까지의 UAV 비행 높이.

UAV 가솔린 수직 이륙 및 착륙
비행 시연 SKYF UAV
프리젠 테이션 SKYF UAV
Horizont은 Horizon Air S-100 헬리콥터 유형 UAV에서 오스트리아의 Schiebel Camcopter S-100를 기반으로하는 순환 검토 레이더로 발표되었습니다. 이 UAV 레이더 순환 검토에 탑재 된 "Hummingbird"는 동체 하단에 설치되어 모스크바의 "Radio Physics 연구소"와 함께 개발 중입니다. 레이다 장비의 총 질량은 6,5 kg보다 커서는 안되며 원형보기 모드 (UAV 정지)에서 필요한 범위는 200 km 이상인 합성 개구의 모드에서 20 km 이상이어야합니다.
이 UAV의 탑재량은 수용할만한 특성을 가진 레이더를 수용하기에는 너무 작습니다 (35 kg). 이것은 개념으로서 흥미로울 수 있습니다. 공중에서의 연속 시간 6.

헬리콥터 형 UAV는 원형 레이다가 장착 된 Horizon에서 생산됩니다.
주어진 쿼드 코퍼스 UAV의 예는 상대적으로 적당한 페이로드를 가지고 있기 때문에 레이더 배치에 직접 관련 될 수는 없지만 설계가 활발하게 개발되고 개선 될 것이라는 데는 의심의 여지가 없습니다. 우선, 그것은 전기 quadrocopters-UAVs와 관련이 있습니다.
쿼드 코프 (quadcopter) 형 UAV 또는 헬기 형 UAV-DRLO 유형의 주요 요구 사항은 높은 신뢰성과 대기 중 장기간 체류가 가능해야하며 지정된 비행 성능 (LTH)은 물론 높은 작동 수명과 낮은 비행 시간을 보장해야합니다.
높은 고도 UAV
장거리 UAV의 경우, 수직 이륙 및 착륙 UAV는 더 이상 효과적이고 충분한 정찰 도구가 아니며, 400 km 정도의 거리를 달성하려면 10 000 미터를 초과해야합니다.
아마도 장거리 대공 미사일 시스템을위한 비행 레이더로서 장거리, 항공기 유형, 중형 또는 장거리의 UAV를 사용할 수 있습니다.
유망주 후보 중 한명 무인 비행기-DRLO는 이륙중량 5톤, 탑재하중 1~2톤의 알테어 UAV가 될 수 있습니다. 이 UAV는 Transas 회사와 함께 Sokol Design Bureau(Kazan)의 Altius-M 연구 프로젝트의 일환으로 제작되고 있습니다. 비행 시간은 최대 48시간이어야 하며 비행 범위는 10km입니다. 000년 알테어 UAV 프로그램은 토목의 우랄 공장으로 이전되었습니다. 항공"(UZGA). Altair UAV 비행 시험은 2019 년에 시작해야합니다.

UAV Altair 프로토 타입
이 유형의 장치는 다른 국가에서 개발되고 있습니다. 특히 중국 기업인 CETC는 JY-300 UAV를 개발 중입니다. 중간 크기의 장치는 컨 포멀 안테나의 캐리어가되어야하며 AWED 무인 차량으로 사용되어야합니다. 예비 자료에 따르면 JY-300 UAV는 약 1300 kg의 이륙 중량을 지니고 400 kg의 탑재 물을 운반 할 수 있습니다. 그는 최대 12 킬로미터의 고도에서 7,6 시간까지 비행 할 수 있습니다. 이 무인 항공기의 설계에 내장 된 레이더는 장거리에서 항공 및 해상 표적을 탐지 할 수 있어야합니다.

프로토 타입 UAV DRLO JY-300 중국 기업 CETC
러시아 중형 및 대형 UAV는 소형, 강력하고 경제적 인 국내 엔진 부족, 현대 항공 전자 공학의 부재 등 많은 문제로 어려움을 겪고 있습니다. 가장 중요한 문제 중 하나는 UAV를 관리하고 근거 지점에서 멀리 떨어져있는 지능형 정보를 수신 할 수 있도록 전역 도달 범위가있는 위성 데이터 전송의 고속 채널이 부족하다는 것입니다.
비행 시간이 긴 DRLO 무인기의 사용은 그러한 채널의 존재를 요구하지 않는다. 일반적으로 장거리 무인 정찰기의 장거리 방공 시스템의 작동 방식은 다음과 같습니다.
장거리 UAV DRLO는 비행장에서 벗어나 에쉴론 방공망의 위치에서 순찰 구역으로 들어갑니다. 모든 정보는 장거리 방공 시스템 운영자에게 전달되며, 또한 지휘 통제 지점을 통해 통합 방탄 시스템의 일부인 다른 방공 시스템 운영자에게 제공됩니다. UAV의 비행은 주로 주어진 궤도에서 자동 모드로 수행되어야합니다. 하나의 장거리 방공 시스템에는 두 개의 DRLO UAV가 포함되어야합니다. 이 경우, 그들은 비행장의 거리에 따라 36-48 시간의 지속 기간 동안 대공 미사일 시스템의 위치를 교대로 바꿀 수있다.
장거리 UAV DRLO의 요구 사항은 단거리 및 중거리 대공 미사일 시스템의 UAV와 동일하며 높은 작동 수명과 낮은 비행 시간 비용이 필요합니다.
문제는 발생할 수 있습니다 : 기사의 제목은 공군 항공기를 사용하지 않고 저공 비행 목표물에 대한 방공 시스템의 작업을 말하며, 비행 기간이 긴 UAV는 분명히 항공을 나타냅니다. 여기서 문제는 부서 소속에 있습니다. 미국에서는 존슨 맥코넬 (Johnson-McConnell)과 육군과 공군의 합의에 따라 헬리콥터가 미 공군에 속하지 않고 직접적으로 미 육군에 복종하며 이익을 위해 행동합니다 (미국에서 항공기를 군대와 공군으로 나누는 것은 잘 쓰여 있습니다 여기에). 우리의 경우, UAV가 특정 대공 미사일 시스템을 언급한다는 사실은 다른 목적으로 공군력을 사용하는 것을 허용하지 않습니다.
무인 항공기로에 쉴론 방공호
쿼드 로코터 유형 DRLO UAV와 장기간 DFLO UAV를 사용하면 밀도가 높은 레이더 지형 범위를 만들고 ARGSN 및 IR GOS를 최대 거리로 사용하여 미사일을 목표물로 타겟팅 할 수 있습니다.
아마도 단거리 대공 방어 시스템 두 대가 quadrocopter-type AWAC UAV가 장착 된 자동차 1 대 또는 4 대의 대공 방어 시스템에 2 대가 있어야합니다. 중거리 방공 시스템에는 UAV 형 쿼트로 코퍼 (quadrocopter) 형 차량 2 대가 포함되어야합니다. 두 대의 장거리 무인 항공기 무인 항공기는 장거리 대공 방어 시스템과 관련이 있어야합니다.
위험 기간이나 적대 행위가 시작될 때, 장거리 비행 무인 정찰기는 대공 미사일 시스템의 위치에 대해 순찰을 계속해야합니다. 단거리 및 중거리 대공 미사일 시스템의 쿼드 로코터 형 무인 항공기는 즉각적인 발사 준비를 위해 운송 수단 차량에 있어야합니다. 공중 위협이 감지되면 쿼드 로코 터 유형 UAV가 몇 분 내에 시작되어야합니다.
UAV 자체의 비용과 비행 시간은 유인 항공기 및 헬리콥터 비용보다 전통적으로 현저히 낮아 경제적으로 매력적입니다. 기술적으로, 제안 된 개념은 극복 할 수없는 문제도 포함하고 있지 않습니다.
중요도가 높은 정지 물체의 경우 AEW 풍선을 사용할 수 있습니다. 공중 조기 경보기구를 갖춘 방공 시설의 경우, 장기간의 무인 항공기는 필요하지 않으며 장거리 대공 미사일 시스템에서 제외되거나 예비 정찰 및 표적 지정 도구로서 출발 준비가 된 비행장에있을 수 있습니다.
함대를위한 UAV DRLO
이전에는 지상 기반 방공 시스템을 위해 UAV를 사용하는 것이 고려되었습니다. 그러나 해군 함정의 항공 방위를 위해 비행 시간이 긴 쿼드 콥터 형 UAV와 UAV를 사용하는 것이 더 중요 할 것입니다. 함대 (네이비). 항공 모함이없고 따라서 AWACS 항공기가 있다는 사실을 감안할 때 현대 러시아 선박은 비행 방공 목표물의 탐지 범위에 대한 물리적 한계로 인해 항공 방어에 관계없이 항공 공격으로부터 제대로 보호되지 않습니다.
러시아 해군의 배에 quadrocopter 유형 UAV를 사용하면 저공 비행 목표의 파괴 라인을 상당히 밀어 낼 수 있습니다. 그리고 해군 함대가 위치한 지역에 긴 지속 시간과 비행 범위를 가진 UAV를 보내면 적군을 정찰하고 미사일에 표적을 지정하는 데 추가 기능을 제공 할 것입니다 무기에 장거리.

UAV가 탄소 나노 튜브 케이블 및 극저온 냉각이 적용된 초전도 케이블로 선박에 연결된 영국 선박 Dreadnought 2050의 개념
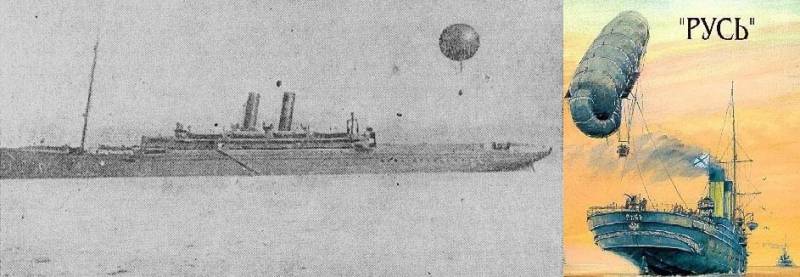
특히 해군의 이익을 위해 AWACS의 풍선 및 비행선 사용을 배제 할 수 없습니다. 역사의 러시아 함대가 풍선을 사용하는 예가 있습니다.
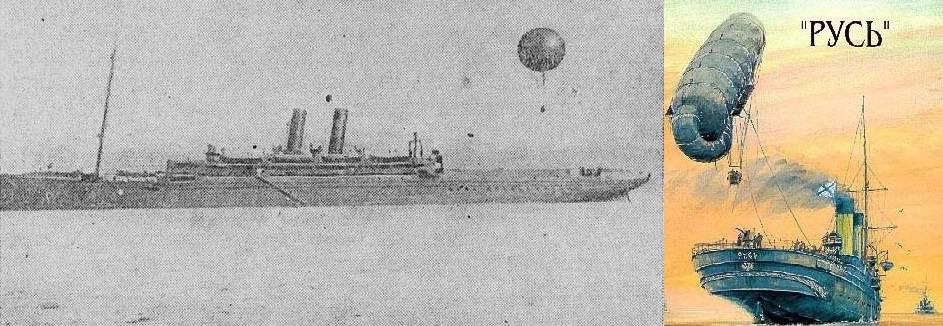
첨부 된 에어로스트가 장착 된 크루저 "Rus"
조사 결과
장거리에서 저공 비행 목표물을 공격 할 가능성이없는 지상 및 지상 방어력이 붕괴됩니다.
단거리 및 중거리 SAM 시스템의 이익을 위해이 문제를 해결하려면 캐리어 차량에서 케이블을 통해 전원 공급 장치가있는 쿼트로 코퍼 유형 DRLO UAV를 만드는 것이 필요합니다.
장거리 방공 시스템의 경우, 장기간 UAV 무인기의 개발을 강화할 필요가있다.
중요도가 높은 정지 물체의 경우 AEW 풍선을 사용할 수 있습니다.
위에서 언급 한 모든 시스템 (quadrocopter type 무인 항공기, 장시간 무인 항공기, 조기 경보 무인 항공기)은 지상 방공 시스템뿐만 아니라 러시아 해군의 선박의 효율성과 생존력을 향상시키는 데 매우 중요합니다.
정보